[From Bill Powers (2012.12.08.1043 MSRT)]
Bruce Abbott (2012.12.07.1830 EST) –
BA: One of us is confused here
and I dont think its me! (nor Martin)
Martin Taylor (2012.12.06.23.52)MT:… Somehow, the information from the disturbance appears at the
output, and the only path through which this can happen is by way of the
internal circuitry of the control system.RM: You are assuming that the only way for information about the
disturbance to appear at the output is for this information to have gone
through the organism.BA: How else could it get there? Magic?
BP: I’m gradually getting the idea (which I wish someone would explain
clearly) that the information-theoretic analysis of a control system
can’t be the basis for designing a control system or explaining its
operation. Martin acts all impatient and disgusted at me for not
understanding this self-evident and obvious fact, but can’t we all just
accept the fact that Bill is old, slow, and ignorant, and try to make all
these obvious facts a little easier for a creaky worn-out brain to
understand? Is all this stuff about information theory actually so
completely worked out that there are no doubts about it at all any more?
If so, why not just explain it all? Or do you have to have a Mensa pin to
understand it?
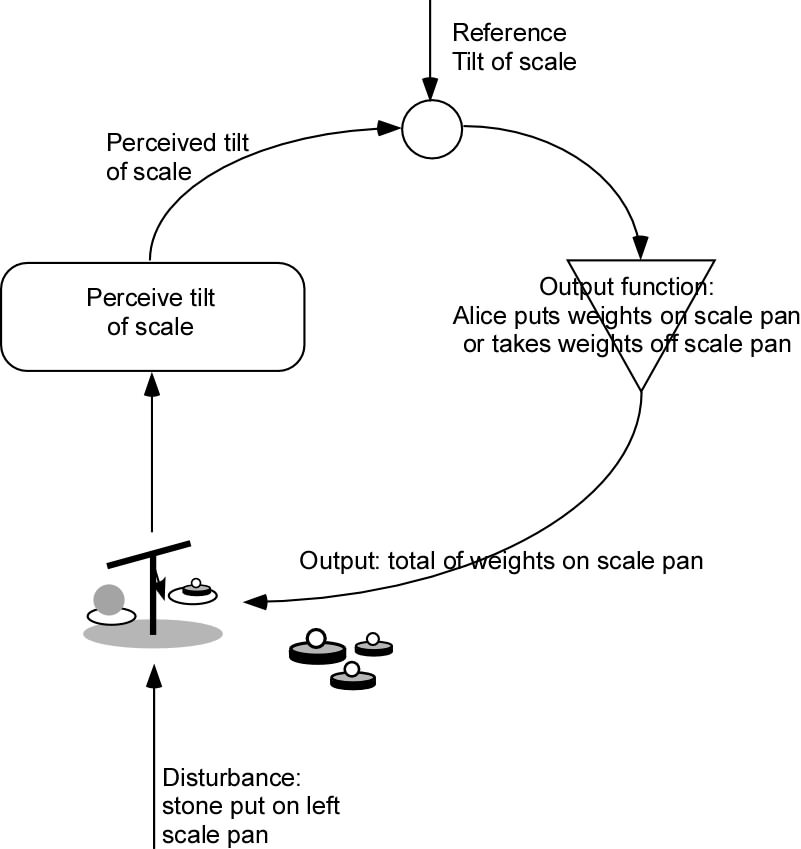
A point I need to have cleared up is how the information from the
disturbance can appear at the output as Martin, and now Bruce Abbott,
claims it does. How can you verify that?
My problem is very simple. The input quantity (or better, the perceptual
signal) is a physical variable with a certain magnitude at any moment.
That magnitude is the sum of effects from two other signals, d and o,
disturbance and output. But the magnitude of the physical variable is
only a single number, and it could be the sum of, literally, an infinity
of effects from other signals in pairs or larger sets. So what can there
be about a perceptual variable, which is known to the control system only
as a single number at any given moment, that gives it a unique
relationship to a disturbance, a sum over many possible causal
variables? If the controlled variable raises that problem, so does the
output variable.
The Taylor/Abbott claim seems to me like claiming that the sweetness
contributed to a cup of tea by a particular sugar cube can be identified
in the final sweetness resulting from all the sugar cubes dissolved in
the tea. Yes, the particular sugar cube’s effect appears in the
sweetness, but given the sweetness, there is no way to work backward to
deduce the presence of any particular sugar molecule or collection of
molecules. So if you think of a control system as a channel carrying a
message from the disturbance to the output, you have to explain how that
message can have any meaning when its elements are taken more or less at
random from two or more other simultaneous messages (d and o).
It seems to me that the physics of message transmission takes precedence
over the information-theoretic and semantic aspects. If you subtract a
signal carrying one message from another signal carrying a different
message, you get a single signal which has only one magnitude at any
given instant. Perhaps someone up on the mathematics of information
theory can tell me what happens to the information in each of the two
input signals – surely the information in the sum of the signals is not
just the sum over the information in each contributing signal. And the
meaning of the output message surely is not the sum of the meanings of
the incoming messages!
Best,
Bill P.