[Bulk] Re: anorexia and
bulimia
[Martin Taylor 2006.05.22.17.09]
[From Bjorn Simonsen (2006.05.22,22,30
EUST)]
[Martin Taylor 2006.05.21.09.53]
[From Bjorn Simonsen 2006.05.21,13:10 EUST)]
I think all conflicts result in oscillations. If there is no
oscillation,
there is no conflict.
They don’t when you model them in simulations.
I tried Rick’s Excel conflict. I used the formula O(t+1) = O(t) +
Slow*(gain*error^2 - O(t)
The output signals exploded.
…
I first went to http://www.perceptualcontroltheory.org/index.html . Here I
clicked at web articles, came to
Kent McClelland: The Collective control … and clicked
there. I clicked at Simulating Conflict, but I can’t see the
graph.
Can anybody see the graph and send it to me. bjornsi@broadpark.no
Is this the place I can study
oscillations?
No. You don’t study oscillations in connection with conflict.
There really isn’t any connection between the concepts, at least none
that I can see.
PS. Why do you put in the [Bulk] text on
the subject, Martin?
I don’t. But if it’s there on a message I reply to, I don’t
remove it.
I think I understand very
well when I think the conflict theory. I wish to do one thing.
When I perceive and experience this a copy of the perceptual signal
goes to a conflicted goal. I get a great error and I perceive what I
wish in the conflicted system. This perceptual signal goes to the
first goal and I get a great error etc. This is what I say is
oscillating. Am I right?
I’m afraid I can’t follow what you are saying. What is “a
copy of the perceptual signal” that “goes to a conflicted
goal”? How do you “perceive what you sish in the conflicted
system?” There are at least two conflicted systems. What does it
mean to say that a perceptual signal goes to a goal?
The basic state of conflict occurs when several control systems
are trying to control their perceptions but don’t have enough degrees
of freedom to work with. Not having enough degrees of freedom means
that they can’t all bring their perceptions to their reference values
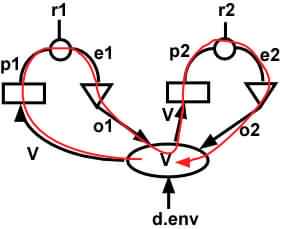
at the same time. The prototypical situation that is often simply
called “conflict” occurs when two control systems try to
control through paths that at some point converge into a single degree
of freedom.
![]()
Equations:
p1 = p1(v) = p1(o1+d1) = p1(g1(e1) + d1) = p1(g1(r1-p1) +
d1)
p2 = p2(v) = p(o2+d2) …
where (v) is the same environmental variable for both control
systems. That’s the one degree of freedom bottleneck in this example.
System 1 “wants” p1 to equal r1, while system 2 wants p2 to
equal r2, and both depend on the single value of v to make it
happen.
However, d1 is composed of two parts: d1 = o2 + d.env
and d2 = o1 + d.env. Either way, v = o1 + o2 + d.env.
where d.env is whatever external disturbance might affect
d.
So, when system 1 tries to influence p1, it disturbs p2, and vice
versa. Each adjusts its output to counter the new disturbance,
creating a loop of influences that passes through BOTH control systems
(red, in the figure).
Rewriting the equation for control system 1,
p1 = p1(v) = p1(o1+o2+d.env) = p1(g1(e1)+g2(e2)+d.env) …
If oscillation is going to occur in this conflict, it will be in
this “extra” long (red) loop. Whether that happens or not
depends on the gains and timing constraints within the long loop.
However, if there isn’t any nonlinearity, and the system oscillates,
the oscillation will explode to infinity. More normally, the variable
v will settle to some value determined by the gains of the two
systems, between the values that the two systems individually would
set (which is what Kent showed). The other option in the absence of
nonlinearity is that the value of v will simply go exponentially to
infinity.
I don’t understand.
Does that help?
Martin