such others as Hein and Held in the 1960s, suggests you are. You can
change the sun angle above the horizon level to whatever you want if
you can run/fly fast enough. But usually you don’t do that. You let
the sun be wherever it is, and the resulting shadow configurations
as whatever results from its current position.
The point of the TCV isn’t what might be controlled, but what Is
being controlled out of the multi-millions of perceptions that you
have at any one moment (using “perceptions” in the PCT sense of a
sensory signal dependent on past or present sensory information).
Just look around you for just those few perceptions of which you are
consciously aware. Is there a bookcase in your field of view? Do you
see wide lighter vertical stripes separated by dark thin stripes
(books and the strip between them). On the lighter stripes do you
see patterns of different colour? Do some of the smaller of those
patterns form characteristic shapes (the letters of words on the
spine). How many of these conscious perceptions from one bookcase
and one book are you at that moment actively and individually
controlling? Or look at a tree in the wind, in which you see
thousands of leaves fluttering in their individual rhythms, showing
their vein patterns at different sun angles and in varying shade.
How many of those fluttering leaf positions and vein patterns are
you actively controlling at this moment? How many trees would you
see if you were in a meadow looking at a woodlot nearby?
Let’s consider some numbers. We have at most a few hundred
individually controllable muscles. All any one of those muscles can
do is get shorter or longer. We do emit chemicals, but not more than
a few tens of truly distinctive ones. Suppose that someone highly
trained is able to command all of these outputs individually and
independently, and could do so with a bandwidth of, say, 10 Hz. That
is to say that the person is able to produce 20 different and
unrelated lengths for each of, say, 250 muscles every second
continuously. That is a control rate of 500 degrees of freedom per
second. That vast overestimate (the true number is more likely to be
nearer 10 or 20 df/sec) is what we have available for control. Any
attempt to control more than that through the environment (as
opposed to “in imagination”) will inevitably result in conflict
inside the control hierarchy.
Now consider the possible perceptions that might be controlled. One
approach is to look at the input sensory system, considering just
orders of magnitude: visual – never mind the hundred million or so
receptor cells – the optic nerve has around a million independent
fibres with bandwidths in the 10Hz plus range; auditory, about
30,000 fibres; tactile, i’ve no idea how many sensory fibres, but
there must be a lot. You get the idea. The input sensory bandwidth
is in the tens of millions of degrees of freedom per second. It is obvious that the true perceptual degrees of freedom is not
given by the number of fibres, since their firings are coordinated
by the coherence of the scenes, soundscapes, and other sensed
aspects of the environment. Optic input is coordinated into gross
features such as moving spots, edges, lines and the like. Directed
motion shape detectors such as these are probably the lowest level
of the perceptual hierarchy, but if the lowest level is, as Powers
would have it, “intensity”, that only makes the problem worse,
because each input fibre conveys an intensity signal (really a
time-differential intensity signal in most cases) in its individual
firing rate.
So, we have at least millions of perceptions available for control
at the lowest level, all possibly changing at a rate above 1 Hz. If
we tried to control them all at the same time, our control structure
would get into the mother of all conflicts, and would probably be
able to control nothing at all. We do have to control only some of
them, leaving most uncontrolled at any one moment – though we could
shift which ones we control to any small subset of the myriad
possibilities. Shifting what we control is a very important part of PCT. It’s in
Chapter 2 of LCSIII, albeit at a very much higher level, where the
degrees of freedom limit is imposed by the environment, not the
organism.
···
[From Adam Matic 2014.03.15.1100 cet]
(A side note: I'm having difficulty
thinking about variables that can be perceived, but not
controlled. I think every variable that can be perceived can
be controlled,
AM:
I don't really understand what is going on
in these experiments with all the smaller and larger control
loops, but if you say they reveal properties of control loops,
then they could also be used in making models. Is that possible
and if so, how do these models perform?
Bruce and I both answered the direct question of how the models
perform, so I’ll try to help with “smaller and larger control
loops”.
We don't need to enquire what the experimenter is controlling for
which the action output is running the experiment. For some reason
the experimenter wants to know something, and to investigate
“wanting to know” opens a whole can of worms. Trying to not open
this can, consider simply asking a question:
Q (Questioner): "Is it raining?"
R (Responder): (1) "I don't want to tell you" or (2) "I can't see"
or (3) “Yes” or “No”
I think you must agree that all these QA pairs are possible, and
that because asking the question is an action, Q must be
controlling some perception for which Q imagines R’s answer will
reduce the error. I’m not going to enquire into that control loop
here, because it brings up some issues relating to B:CP Chapter 4,
and that’s an entirely different thread if and when those issues
might be raised.
Whatever the perception Q is controlling, R's answers may affect
different perceptions Q has about R. These affected perceptions
may or may not be controlled by Q, but that’s irrelevant at this
point. It would be relevant to the continuation of the dialogue,
but we aren’t analyzing that.
Answer 1: Q can perceive that R is not controlling for perceiving
R-self as being cooperative. Q’s perception of raininess is not
affected.
Answer 2: If Q currently perceives R to be controlling for being
cooperative, Q can perceive that R is unable to see whether it is
raining. Q’s perception of raininess is unaffected. Q must
perceive R to be controlling for being cooperative, becasuse if Q
does not perceive this, R might say “I can’t see” because he is
controlling for seeing himself as not helping Q.
Answer 3: If Q currently perceives R to be controlling for being
cooperative, Q can perceive that R is able to see whether it is
raining. If Q perceives R to be good at distinguishing “raining”
from “not raining” states, Q’s perception of raininess is closely
determined by whether the answer is “Yes” or "No’ (or “lightly” or
“pouring” or other modifiers).
Only if Q perceives R to be controlling for perceiving R-self to
be cooperative will Answers 2 or 3 affect Q’s perception of
whether R can see if it raining or Q’s perception of raininess. So
if Q wants to know whether R can see, Q has to at least test
whether R is controlling for being cooperative by asking some
other questions (changing disturbances in the TCV). Q may have to
act if Q’s perception of R’s cooperativeness differs from Q’s
reference value for that perception.
On the other hand, if Q is interested in whether it is in fact
raining, R’s cooperativeness doesn’t matter unless Q perceives R
to be actively deceptive (a short form for perceiving R to be
controlling a perception of Q as perceiving to be true something R
perceives to be untrue – itself a short form for a long
rigmarole).
At the end of all this, assuming Q perceives R to be cooperative
and physically and mentally able to distinguish “raining” from
“not raining”, Q has a current perception of whether it is
raining. Is Q controlling that perception? Not if Q is an ordinary
human, but Q probably IS controlling a perception created by a
perceptual function into which the perception of raininess feeds.
R has served the function of a tool, such as a telescope or a
mirror, which would allow Q to perceive something too distant or
obscured.
So far so good?
Now suppose that before asking the questions, Q knows whether it
is raining, and has done the tests that allow R to be perceived as
cooperative. I repeat the Q-A possibilities from above:
Q (Questioner): "Is it raining?"
R (Responder): (1) "I don't want to tell you" or (2) "I can't see"
or (3) “Yes” or “No”
Answer (1) is very unlikely, so we consider Answers (2) and (3).
In both cases, the answer tells Q only something about R, not
about raininess. If R gives answer 2, or if R says “Yes” when Q
can see that the correct answer is “No” (or vice-versa), Q may
perceive that R is not able to see whether it is raining. If the
Answer is (2), Q may also perceive that R perceives that he cannot
see, whereas if it is (3), Q can perceive that R perceives that he
can see, but that R’s self-perception is misguided.
On the other hand, if R's answer "Yes" or "No" agrees with Q's
direct knowledge of the correct answer, there’s only a 50-50
chance that this occurred because R is actually able to see
whether it is raining. If Q wants to find out whether R is able to
tell the difference between raining and not raining, Q has to try
the same question on different occasions, sometimes when it is
raining, sometimes when it isn’t. Each time R’s answer agrees with
Q’s perception reduces by 50% that chance that R doesn’t see
“raining” differently from the way Q sees it.
It might turn out that when the rain is spotty or a light drizzle,
R’s answers agree with Q’s perception of raininess 75% of the
time, but when the rain is heavier or under a clear blue sky the
agreement is 100%. Q may then perceive that for R to say it is
raining, the rain must be, say, heavier than is required for Q to
perceive it is raining. Q has learned something about how R
perceives raininess, or rather about how R labels different
degrees of rain.
Translate this into the context of an experiment. Q is now the
experimenter, and controlling a perception of R’s cooperativity
and a perception of R’s understanding of the task, Q presents two
noise bursts in quick succession, with a 500 Hz tone embedded in
one of them. R has been instructed to say “Yes” if the tone is in
the first noise burst, “No” if it is in the second, and never to
say “I can’t hear it”.
Q: "Is the tone in the first noise burst"
R: (1) N/A or (2) N/A or (3) "Yes" or "No" (using the numbering
from above, answers (1) and (2) should not happen.
If Q has placed the tone in the first noise burst, but R says
“No”, Q perceives that R did not hear the tone. But if R says
“Yes” that could happen as much as 50% of the time if R did not
hear it, but would happen 100% of the time (assuming R control
perfectly for being cooperative) if R did hear it.
Q asks the question multiple times using the same intensities of
noise burst and tone. Sometimes R’s answers correspond with Q’s
insertion of the tone into the first or second noise burst
(correct answers), sometimes they don’t (wrong answers). For each
wrong answer, Q perceives that R did not hear the tone, but for
each correct answer Q perceives only that R might have heard the
tone. After a lot of questions, Q has a “percentage correct” score
for that particular pairing of noise level and tone intensity. If
the percent correct score is 50% Q can be pretty sure R cannot
hear the tone under those conditions, and if it is 100%, Q can be
pretty sure R can hear it.
But what if the percent correct is intermediate? For a given noise
level and tone intensity, one might naively think that either R
will hear the tone or will not hear it. But the nature of noise
ensures that sometimes the random nature of the noise will make it
seem as though a tone was in the burst and sometimes the phasing
of that frequency band of the noise will cancel a tone that is
actually inserted. The louder the tone, the less likely it is that
this randomness will affect which noise burst is heard as having
the tone. There’s a whole mathematical literature on this from the
1950s and 1960s (to which I contributed), and a mathematically
ideal listener can be defined. The percent correct that would be
achieved by the ideal observer, plotted as a function of the
relative intensities of the tone and noise, defines the ideal
“psychophysical function”. No real observer can get a better score
than that. The point of mentioning it here is to show that there’s
a problem in interpreting percent correct literally as a measure
of R’s ability to hear a tone in a noise burst.
The statistical problem is actually quite easily handled, and
there’s a big literature about it. The only point in mentioning it
is to illustrate that even if there are statistical issues of
interpretation, Q can learn something about R’s ability to hear by
doing something that is directly equivalent to asking a simple
question to determine whether R knows something or is able to do
something. The “larger control loop” is the one in which Q
controls for R to understand the question and to be cooperative in
answering it.
Here I'm going to quote from an old message of mine [Martin Taylor
2012.12.08.11.32] about measurement. It deals with measuring an
inanimate property, in this case the weight of a stone.
-----------start quote--------
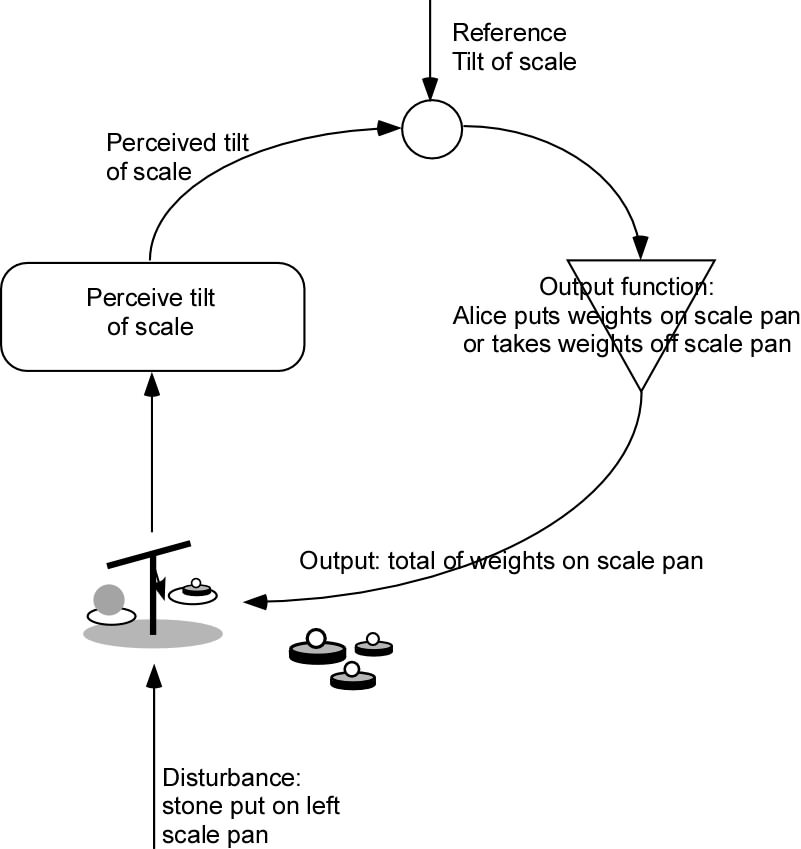
To see why control can be considered to be
measurement, think of this example. Alice wants to know how
heavy is a stone she has picked up. She has a balance scale and
a set of weights weighing 2, 1, 1/2, 1/4 … kilos. She puts the
stone on one pan, and the scale tilts down to the side on which
she put the stone, so she puts a weight on the other pan. The
tilt stays the same, so she adds another weight and the scale
tilts the other way. Alice removes the last weight she added and
adds the next lighter one. She keeps adding and removing weights
until the scale stays level or she runs out of ever smaller
weights.
What is Alice doing? Alice is performing the actions of the
output function of a control loop, looking at the error that is
shown by the tilt of the scale, and altering her output (the
weights on the other pan) until the error is zero. The output,
which is the sum of the weights in the other pan, now is a
measure of the weight of Alice’s stone in exactly the same way
that the output of any control system measures the disturbance
to its controlled environmental variable.
Of course, there need be no human Alice in this story. The
perceptual function signals only the direction in which the
scales tilt, so the error is only a binary value, which could be
called “1” or “0”, “left” or “right”, “too heavy” or “too
light”, or any other contrasting labels. I will call the values
“left” and “right” according to which side of the scale is
heavier. Likewise, there is no need for Alice to provide the
output function. It could be a mechanical device that is
provided with the weights that have values in powers of two
times 1 kilo, with 2 kilos the heaviest. We can assume that the
scale would break if the stone was over 4 kilos!
The output device would load and unload these weights onto and
off the scale pan according to the following algorithm. The
stone is on the left pan.
1. Add to the right-hand pan the heaviest weight not yet tried
(initially, since none have been tried, that means the 2 kilo
weight).
2. If all the available weights have been tried, stop. Else...
3a. If the error is "left" go to step 1 (there is not enough
weight in the right hand pan)
3b, if the error is "right", remove the lightest weight in the
pan and add the heaviest weight not yet tried.
At the end of this process, the balance is as close as the
machine (or Alice) can make it using the available weights.
Anyone who wanted to know the weight of the stone could simply
read out the weights in the pan as a binary number of kilos,
with the units starting at the 2 kilo weight. Those weights are
the current output value of the control system., which, without
Alice, is a perfectly standard control loop.
---------------end quote--------
This "weighing a stone" procedure describes in principle any
measurement, whether done by a human or a machine. In particular,
the entity measured might be some property of an organism. The
“stone on the left pan” might be the ability of a subject to
discriminate
between the brightnesses of two patches. The balance “Left” or
“Right” could be whether the subject’s response is right or wrong.
If the subject was correct, reduce the brightness difference
(remove a weight from the pan), else increase the brightness
difference (add a weight to the pan).
There are two problems with this when the measurement is of a
property of an animate entity. One is that the result is
inherently noisy for a variety of reasons. That’s not interesting
here because there are statistical techniques for reducing the
effect of the noise by altering the algorithm. The other is that
the subject has to be controlling a perception for which the error
is reduced by reporting accurately to the best of her ability –
colloquially, the subject must try to get it right, which we
covered above.
I hope this long-winded explanation at least may guide you to
answering your on question, if it doesn’t do so directly.
Martin