···
On Fri, Sep 2, 2016 at 12:36 PM, Alex Gomez-Marin agomezmarin@gmail.com wrote:
AGM: So, your answer is like one of the Ten Commandments: “you shall regard all observed and interpreted output as illusion”.
RM: Not quite. It’s more like “When you are observing the behavior of a living system, you shall regard all observations of stimuli apparently causing responses, reinforcements selecting responses or responses being generated by internal motor commands (and constrained by the environment) as likely side effects of control”.Â
AGM: Two more questions, then:
AGM: 1. Is a living organism still “a closed loop system” even when the experimenter tries hard “to break the loop” so as to apply the stimulus-response strategy?
RM: Yes. Â
AGM: 2. Why can’t then the experimenter be able to learn some aspects of the organism function, specially when the system is not an ideal system in terms of Bill’s classification?
RM: Once you know that you are dealing with control behavior the most important thing to know about the organism function is the perceptual variable that the organism is controlling. Once you know this you can learn how closely the system approaches ideal without breaking the loop. Indeed, you wouldn’t even know how to “break the loop” until you knew what variable was under control by the organism. And if you do manage to figure out a way to 'break the loop", the system, because it is still closed loop relative to other variables, will still be controlling those other variables. So it’s doubtful that “breaking the loop” research – trying to turn closed loop into open loop systems – will tell you much about the controlling done by living systems.Â
BestÂ
Rick
Â
–
Richard S. MarkenÂ
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers
On Fri, Sep 2, 2016 at 6:32 PM, Richard Marken rsmarken@gmail.com wrote:
[From Rick Marken (2016.09.02.0930)]
On Thu, Sep 1, 2016 at 3:24 PM, Alex Gomez-Marin agomezmarin@gmail.com wrote:
AGM: Beautiful analogies, Rick. Now, does this mean that one does not need to prove the behavioral illusion in each particular case because, by construction of argument, one already knows that it must be a behavioral illusion?
RM: A very good question. I think the question is answered in Bill’s 1978 Psych Review paper (“Quantitative Analysis of Purposive Systems”, reprinted in LCS I) but I’ll try to give a quick summary specifically related to your question.Â
RM: I think another way of asking your question would be this: Do we need to prove (in the sense of “test” since we don’t prove propositions in science in the same way as we do in mathematics) in each particular case that the appearance of behavior as caused, selected or planned output is an illusion? If the behavior is that of a living system the answer would be a cautious “no”.
RM:  In his 1978 Psych Review paper Bill showed that living systems are very likely to be closed loop systems. We know that sensory inputs cause behavioral outputs via the nervous systems; and we can see that, at the same time, these behavioral outputs affect those same sensory inputs via the environment. And since the behavior of these systems is generally very stable, the feedback in the closed loop must be negative. So living systems are very likely to be negative feedback systems – Bill calls them N systems in the article – and N systems act to control their own inputs.Â
RM: So we can assume that we are looking at the behavior of a control system (rather than that of an open-loop causal system – Bill calls it a Z system in the article) when we are looking at the behavior of a living organism. That means when we see a living organism apparently reacting to stimuli, having its behavior “strengthened” by its consequences or producing a programmed set of outputs, we can be pretty sure that those appearances are “illusions”. We know this for the same reason that we know that the pencil doesn’t really bend when we place it in water. With living organisms we know that if they are N-systems these behavioral appearances are “side effects” of control of input; with the pencil we know that the appearance of bending is a “side effect” of differential refraction of light by water and air.Â
RM: But as in the case with the pencil in water, there is always the possibility that what is seen is not an illusion. The pencil might really have bent in water if, for example, one side of the pencil were made of a material that expands in water. And the behavior of an organism that we see might really be an example of caused, reinforced or computed output. But this very unlikely possibility is actually implicitly handled by the PCT approach to studying living control systems.Â
RM: PCT research aims to understand the behavior (controlling) of living organisms in terms of the input variables that are being controlled. So when a PCT researcher sees a living organism apparently reacting to stimuli, being manipulated by reinforcement or producing programmed output they try to guess at the aspects of the organisms sensory input around which this behavior might be organized; that is, they try to guess at what input (perceptual) variables might be under control.
RM: The general methodology used to do this kind of research  is called the Test for the Controlled Variable. An example of such research, using modeling to determine the perceptual variables under control is described in this paper: https://www.dropbox.com/s/1ajwvsybrfm6kop/Chasin%27Choppers.pdf?dl=0. In this research the object interception behavior observed could be seen as caused output; the view of the helicopter causes the actions of the pursuer. But this was assumed to be an illusion and, indeed, a model that controls aspects of the optical projection of the helicopter on the retina explains the behavior nearly perfectly.Â
RM: While the TCV is aimed at the discovery of the perceptual aspects of input around which an organism’s behavior is organized, it can also reveal the unlikely possibility that the observed behavior is not mediated by a controlled perception; that the apparently caused, reinforced or programmed output really is what it appears to be; that the behavior is really that of a Z system; that the pencil really is bent!Â
RM: So the bottom line answer to your question is, again, no; you don’t have to explicitly test to see whether every behavior of a living system that you observe is an example of a behavioral illusion. You go in assuming that apparently caused, selected or progreammed behavior is an illusion – that the pencil is not really bent. While you are doing the research aimed at understanding the behavior you see – under the assumption that it is organized around control of some perceptual variables – you might – though it is very unlikely – find that it is not the behavior of an N-system. So you might find that a behavior is actually a non-illusory caused output (the saccade is apparently an example). But the default assumption of PCT-based research is that behavior is the control of perceptual input; it is not caused, constrained, selected or programmed output.Â
BestÂ
Rick
–
Richard S. MarkenÂ
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers
On Thu, Sep 1, 2016 at 10:18 PM, Richard Marken rsmarken@gmail.com wrote:
[From Rick Marken (2016.09.01.1320)]
 Fred Nickols (2016.09.01.1554 ET)]
Â
FN: I really like your post below, Rick.Â
RM: Wow, that is so exciting Fred! Thanks. I think this is the first post of mine in weeks that anyone has liked!Â
Â
FN: I also spotted something that I think might present a problem when explaining PCT to others. Here’s the snippet I pulled from your longer post below:
Â
RM: So the “behavioral illusion” refers to the fact that when you observe the behavior of a closed loop control system – living or artificial – what you see is not necessarily what is actually happening.Â
Â
FN: It’s the “what you see is not necessarily what is actually happeningâ€? that’s giving me pause. I think most people, especially some behaviorists I know, would snort or laugh and say something like, “Don’t tell me I’m not seeing what I’m seeing.â€? I think a better way of saying what you’re driving at is to say, “How you explain or account for what you see, especially if you do so in cause-effect or stimulus-response terms, is very different from the way those same observations are explained by control theory.Â
RM: Yes! Much better  (and more correct) way of saying it! Thanks again Fred!
BestÂ
Rick
Â
More important, in light of control theory, those stimulus-response explanations are very misleading. In control theory, especially perceptual control theory (PCT), those misleading explanations are referred to as “the behavioral illusion.�
Â
Â
FN: At least that’s the way it seems to me, Rick.
Â
FN: Anyway, thanks again for this post. I like it – a lot./p>
Â
Regards,
Â
Fred Nickols, Consultant
My Objective is to Help You Achieve Yours
DISTANCE CONSULTING LLC
“Assistance at a Distance�SM
Â
Â
Â
From: Richard Marken [mailto:rsmarken@gmail.com]
Sent: Thursday, September 01, 2016 2:09 PM
To: csgnet@lists.illinois.edu
Cc: Henry Yin
Subject: Re: The Behavioural Illusion and modelling
Â
[From Rick Marken (2016.09.01.1110)]
Â
cc: Henry Yin, because he understands the importance of the behavioral illusion and I’d like to hear what he thinks of this post.
Â
Martin Taylor (2016.08.30.13.12)–
Â
RM: This is a nice effort to explain the behavioral illusion but I’d like to give my own explanation. I’ll start by defining an illusion as an observation that is not what it appears to be. For example, here is an example of an optical illusion:
Â
RM: What you observe are two parallel vertical lines that bulge out in the middle. This is an illusion because we know, for other reasons (such as from measuring the distance between the lines at the top, middle and bottom) that there is no bulge. Another illusion is the observation of a straight, rigid object, like a pencil, bending when placed in water, like so:Â
Â
Â
RM: Again, this is an illusion because we know, for other reasons (such as feeling along the pencil while it is immersed) that the object is not bent.Â
Â
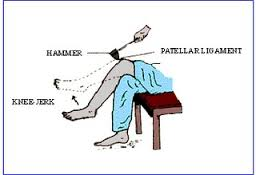
RM: Behavioral illusions are illusions in the same way these optical illusions are illusions: they are observations that are not what they appear to be. One example of a behavioral illusion is a “reflex”, such as the patellar  of “knee jerk” reflex:
Â
Â
RM: What you see is a hammer tap below the knee causing the lower leg to kick up. The hammer tap looks like a “stimulus” that is the cause of the knee jerk “response”. It looks like stimulus causes response. The stimulus-response appearance of reflexes was not considered an illusion until it was shown to be, by other mean. The “other means” was PCT.Â
Â
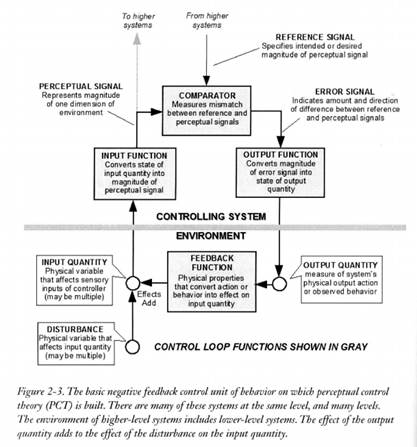
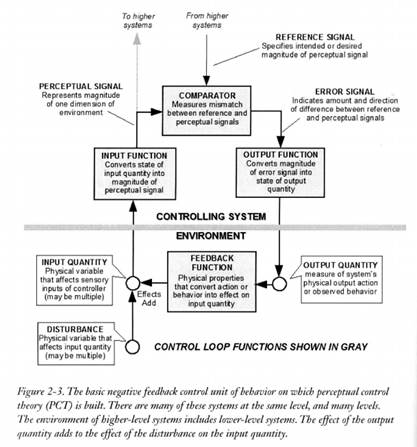
RM: The PCT analysis of the stimulus-response illusion starts by noting that behavior is a closed-loop control process organized around the control of the sensory effects of stimuli: controlled variables. When this loop is analyzed correctly it can be shown (as Powers did in his 1978 Psych Review paper) that the observed causal relationship between stimulus and response is actually the inverse of the causal relationship between the response and the sensory effect of the stimulus; this relationship is called the feedback function and the sensory effect of the stimulus is the controlled variable.Â
Â
RM: So the “behavioral illusion” refers to the fact that when you observe the behavior of a closed loop control system – living or artificial – what you see is not necessarily what is actually happening. In the case of the stimulus-response illusion, the actual causal connection from  stimulus to response is “masked” by the fact that it occurs as part of a closed loop control process.Â
Â
RM: There are actually three versions of the behavioral illusion, which are described in my “Blind Men and the Elephant” paper in “More Mind Readings”. Reflexes, like the patellar, are examples of the stimulus-response illusion; operant behavior is an example of the reinforcement illusion; and the power law is an example of the emitted output illusion (called the cognitive illusion in the paper).Â
Â
RM: How “illusory” any of these behavioral illusions are depends on many factors. For example, the stimulus-response illusion is much more pronounced when the stimulus (disturbance to the controlled variable) is abrupt and strong rather than gradual and weak (see “A Bucket of Beans” in LCS II); the emitted output illusion is more pronounced when there are no obvious disturbances to the controlled variable. These illusions are also more pronounced when the system under observation controls well. A system that controls poorly will make only a very weak “response” to a “stimulus”(disturbance) that affects the variable it is controlling. So the stimulus will not give the appearance of causing the response and there will be a very weak stimulus-response illusion.Â
Â
RM: All behavioral illusions result from failure to understand the implications of the fact that one is observing at the behavior of a closed loop control system. It’s like looking at the bent pencil illusion above and not knowing the implications of the fact that the pencil is partly in water. This analogy should make it clear why the behavioral illusion is so important. A researcher who doesn’t know that the refraction of light is different in water and air will start looking for explanations for why the pencil is bent; a researcher who doesn’t know that a closed loop system acts to control its input will start looking for explanations of why stimuli cause responses, why reinforcement selects responses or how responses are emitted.Â
Â
RM: The behavioral illusion is important because it shows that behavioral scientists have been studying the different flavors of the illusion – taking them for what is actually happening – for over 100 years. Â
Â
Best
Â
Rick
Â
–
Richard S. MarkenÂ
“The childhood of the human race is far from over. We have a long way to go before most people will understand that what they do for others is just as important to their well-being as what they do for themselves.” – William T. Powers
–
Richard S. MarkenÂ
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers