[Eetu Pikkarainen 2017-10-13 2]
Wow Martin, that
[Martin Taylor 2017.10.10.13.31] was really impressive. I quote it wholly before my new text. I change again the title.
MT: Your mention of varying the reference value, whereas we have been talking about conditions in which only the disturbance changes, brings up another way to think of overt and masked causality.
The masked causality is the ring of causal connections the together form the loop, which is masked because he feedback tends to bring the whole ring back toward the state it was in before the external event (disturbance
or reference change). The overt causality is that between the reference value and the value of the CEV in the environment. A change in reference value changes the value of the CEV, mediated by the ring’s masked causality. The clearer the overt causality, which
is the way the controller “imposes its will on the universe”, the more strongly masked is the ring set of causal connections.
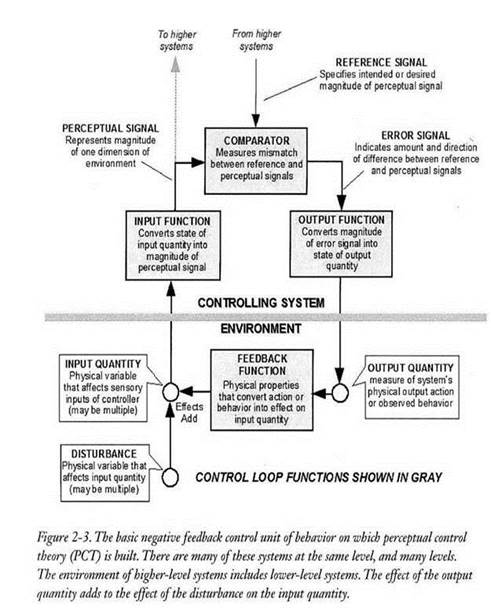
MT: If you look simply at a canonical loop diagram, the relation between the reference and the CEV is symmetric with the relation between the disturbance and the perception.
So why does there seem to be an overt causality between reference and CEV, whereas the causal relation between disturbance and perception is masked and not obvious? (If it were obvious, this discussion would never have
existed and the long-running “Rick against the unseeing world” saga would not have this chapter – in which Bill P was part of “the unseeing world” who insist that normal causality operates throughout the control of perception).
MT: The canonical diagram may look symmetrical, but it isn’t.
The gain on the output side is, and must be, much greater than that on the input (perceptual) side. Both dynamically and in the asymptotic equilibrium state that difference is the only reason why the reference-to-CEV
causality is more obvious than the disturbance-to-perception causality. As Bruce Abbott has pointed out, the causal effect of a step change in the disturbance is fully apparent at the perception until at least one loop transport delay later, and remains partly
effective for an appreciable time thereafter, forever if the output function is a leaky integrator.
MT: The idea of causality is itself a gross simplification of the very high-dimensional flow of state through an unimaginably large Universe, but so long as we use the word as a linguistic convenience, we
might as well try to use it somewhat consistently. In particular, so long as we are working on time and distance scales where relativistic effects are trivially small, then if A occurs before B we should not say B causes
A. Nor should we ever say that A is the only cause of B without specifying other conditions that surround the two events.
EP (from now on): I started to think about that symmetry / asymmetry question which has intrigued me also earlier. To make it more clear is draw this funny symmetric diagram which can turned around if you wish:
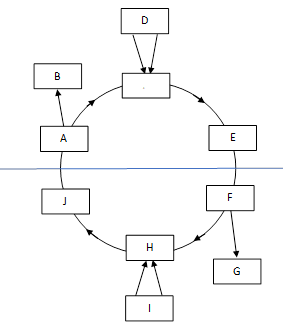
This is not very adequate and perfect diagram because the wire labels and functions are not differentiated. The boxes are rather just points in the diagram. (Label “C� has vanished in conversion.) I try next describe
what I mean with these points by starting randomly from A and assuming that subject is above and environment below the vague blue line.
signals but they have an average strength which depends (among others) on the strength of the original effect. The signal branches to B and C.
B: If the controller is an elementary control unit then the perceptual signal is sent at least to some other units above it in the control hierarchy. If the controller is a highest unit in the hierarchy or the diagram
depicts the whole subject as one control system then this branch is probably missing.
C: (Empty box in the picture.) This is the comparator function where the perceptual and reference signals are compared and the error signal produced as a difference (remainder) between perceptual and reference signals.
D: This box refers to some other control units which are higher in the hierarchy. They send their output as reference signals to C. The signals they send can have combined effects and in the case of internal conflict
they can more or less cancel each other (see Powers: MSB p.74-).
E: Here is the output function which is a kind of an amplifier. It converts the error signal to some kind of environmental force as an output. The strength of the output depends on the strength of the error but is amplified
or gained(?). It can typically also realize a time integration so that the force of the output grows from zero (or earlier output level) gradually and continues growing as long as the error remains.
F: This is usually called the environmental feedback function. I understand that it means the environmental causal chain through which the effects of the output is mediated forward inside the loop. I guess the nature
of this chain can increase or decrease the loop gain so that certain kind of chain can enable stronger consequences with less output. For example tools can be such mediators, or feedback links.
G: This box refers to (immediate) side-effects of the output. In a way these immediate side-effects lessen the efficacy of the output as a wasted energy. But there are also mediated side-effects: the output changes the
situations in the environment and thus the conditions of many (all?) environmental processes will change which can more or less turn the course of those processes away from what they had been if that output had not happened. (“Everything affects everything.�)
H: This is the CEV or the complex environmental variable which (presumably) corresponds to (and is responsible for) the environmental effect which is converted to perceptual signal in A. This variable is a (possibly complex)
feature of one object or of a complex of objects. The feedback chain consists of objects whose certain properties make them interact together and thus form the links of the chain and CEV is one of these links.
I: Here are the incoming branches of the feedback chain and they together form the disturbance. The value of CEV is determined by the combined effects of all these branches and the output. Here like with references these
disturbance effects can strengthen or weaken each other. They typically are thought to be opposite to the output but some effects can also be concurrent and thus strengthen the effect of output to the CEV.
J: This is not usually drawn in PCT diagrams. This is the end of the feedback chain which happens to be after the CEV. For example these links could be something like newspaper, mirror, microscope or any other mediators
or chains of mediators via which the effect of the CEV receives the controller. Sometimes there is perhaps none. F and J could be called the output part of the feedback chain and the input part of the feedback chain, respectively.
Now if we look at the seeming symmetry of the loop: C and H with incoming branches are very similar, only error is the (theoretical) sign conversion in C. Practically this sign conversion seems to happen more in the environmental
side. (?) A and F with outgoing branches are very similar. The biggest apparent difference is between E and J. For E it is important that it amplifies the signal strongly enough. Instead for J it is important that it does NOT change too much and distort the
original effect of the CEV.
This is the formal answer to my old problem what justifies that in the theory of action we look at the interaction between subject and environment from the point of view of the subject.
Eetu
Please, regard all my statements as questions,
no matter how they are formulated.