···
From: Richard Marken (rsmarken@gmail.com via csgnet Mailing List) csgnet@lists.illinois.edu
Sent: Saturday, May 11, 2019 2:05 AM
To: csgnet csgnet@lists.illinois.edu
Cc: Henry Yin hy43@duke.edu
Subject: Re: Anticipatory Postural Control
[Rick Marken 2019-05-10_17:04:34]
On Fri, May 10, 2019 at 12:50 PM Heather Broccard-Bell random.information.consultant@gmail.com wrote:
HB-B: I kind of think a lot of the problem is semantic. Some seem to be upset by the term “prediction” or “anticipation”, and I think what Rick/Henry suggest is a reasonable explanation for a mechanism for what most people would call anticipation/prediction. It can’t be magic :))
RM: The only time I get upset by terms like “prediction” and “anticipation” is when they give the wrong impression of how the PCT model explains some behaviors.
HB : And how PCT explains behavior ??? In PCT or RCT way.
RM : This usually happens when it “looks like” a behavior involves “prediction” or “anticipation”.
HB : You don’t know nothing about which meachanism in orgsnism could be responsable for “prediction” (anticipation) and you are judging what PCT explains ?
RM : For example, the behavior called “catching a fly ball” appears to involve “prediction” or “anticipation”.
HB : It does involve prediction. Catchers goal is to catch the ball and so he has to “predict” where the ball will fall. If you would collect the data and Bill Poers expected you to do and if you would do some experiments on your own you would see what is happening when somebody tries to “catch the ball”.
FN earlier :
The relative movement between me (one the run) and the ball (on the fly) tell me if I’m likely to intercept it or not. If so, I keep doing what I’m doing. If not, I speed up, change course, slow down or whatever it takes to maintain my sense that I am likely to intercept the ball…I think the fielder/catcher is predicting whether or not he can intercept the ball…
HB : Fred was baseball player if I understood him right. So here we have finally some experiences from the game so that we’ll not guess what is happening and phylosophing what is happening in baseball game. If you want to “intercept” the ball you have to “predict” or anticipate the “intercepting point”. That’s the goal : to catch the ball not to calculate x and dimension of the flight of the ball. And that’s exactly where “fielders” are moving if you’ll look videos about baseball game. To the “catching point”.
RM : You can see it in the movements of the fielder in my baseball catch simulation (https://www.mindreadings.com/ControlDemo/CatchXY.html). The fielder seems to be making “anticipatory field adjustments” (AFAs?) in anticipation of being in the proper position to catch the ball. But we have found that the fielder’s behavior can be accounted for quite well by a model that involves no prediction at all;
HB : In every movement prediction is involved. Reference is some kind of “prediction” of future state. The question is how succesfull you are in achieving that future state,
RM : …the fielder in the ball catching demo gets to the correct position by controlling two present time perceptual variables: vertical and horizontal optical velocity.
HB : They can because they are using “prediction” from those perceptual variables. Your baseball catch is nonsense, and I proved it many times even with videos. Beside that you didn’t show any evidence that you are right, and Bill Powers was dissapointed about that you didn’t collect any data, it seems that you claim that fielders moving (behavior) is not goal directed, but it is “governed” by input from “what ever horizontal and vertical or x and y dimensional movement of the ball” and other nonsense. How can you analyse Life events in “two dimensional space” ?
RM: The PCT model I propose to account for the postural adjustments that seem to anticipate future disturbances (APAs) also involves no prediction.
HB : Your “anticipation”, prediction" about PCT is wrong. Bill did change his mind couple times about whatever you want to say about “prediction” but as I said before “prediction” is part of the control hierarchy. The problem seems to be that you don’t understand how it works ?
RM : My model involves present time control of an event perception that I call “reach”;
HB : We established for more than 50x that your RCT model of “Control of behavior” which controls some “controlled variable” in environment is wrong.
RM : I didn’t define it very well because I don’t have a good idea of what it is but this event would be a temporal pattern of proprioceptive sensations – sensed angles of the limbs, center of gravity, etc.
HB : What kind of terms are these in the light of “Control of Perception”. What is center of gravity ??? How do you sense angles of the limbs ?
RM : This temporal pattern is a perceptual variable, just as a temporal pattern of phonemes is a perceptual variable. The “reach” control system I proposed
HB : Where did you proposed “reach” control system ??? Is it RCT or PCT proposal ???
RM : …uses variations in posture (including APAs), limb angles and muscle forces to bring this perceptual variable to the reference state (that I called “reach”) while protecting it from disturbances
HB : What exactly here is “protected from disturbances” ? And muscle forces are not “bringing” or “pushing” perceptual variable to the reference state. What does it mean “bringing” ? It seems that you are saying that you directly “control output” or muscle forces to “bring perception” to reference state ??? We know that mantra in PCT is that “ouput is not controlled” ? So how you directly control muscle force ?
RM : …that can affect the perception at any point during its production. I’m conceiving this control as being analogous to controlling for saying a particular word, as described in the “Control of Sequence” chapter of B:CP. In that model of word production there is also no prediction involved; the perceptual function just “constructs” a word based on the sequence of phonemes (analogous to the postural adjustments occurring during a “reach”) that are produced by lower level systems. It doesn’t predict what phoneme is coming next.
HB : Right. Bill changed his mind couple times about “feed-forward” (CSGnet archives) and B:CP. So you need right explanation what kind of phenomenon “prediction” or “anticipation” could be in control hierarchy ?
RM: In order to test this model we really have to come up with a clearer definition of the proposed controlled variable – which I suppose could be called “reachness”.
HB : In PCT a clear definition is in “Control perception” terms" and of course in terms of internal control. If I understand you right it seems that “reachness” seems to be “Control of behavior” insteas of term which involves references from higher levels. You “reach” with purpose. So “reachness” can’t be purpose but what you “reach for” is purposefull behavior. It has to be some internal purpose (reference) for reaching. If in PCT we are talking about purposefull behavior, every behavior generally has to have some purpose.
RM : And it really would be good to have a working model of this behavior,
HB : What ??? You need a working model for “reach” behavior ??? Working model of any behavior is already defined by Bill’s Powers theory PCT (Perceptual Control Theory). We just have to improve this model. We don’t need new model. This is CSGnet forum meant for exploring PCT. If you want new model establish your own forum for seeking new model of behavior.
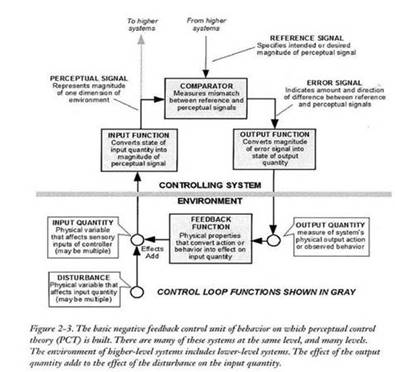
PCT Definitions of control loop :
Bill P (B:CP):
- CONTROL : Achievement and maintenance of a preselected state in the controlling system, through actions on the environment that also cancel the effects of disturbances.
Bill P (B:CP):
- OUTPUT FUNCTION : The portion of a system that converts the magnitude or state of a signal inside the system into a corresponding set of effects on the immediate environment of the system
Bill P (LCS III):…the output function shown in it’s own box represents the means this system has for causing changes in it’s environment.
Bill P (LCS III):
- FEED-BACK FUNCTION : The box represents the set of physical laws, properties, arrangements, linkages, by which the action of this system feeds-back to affect its own input, the controlled variable. That’s what feed-back means : it’s an effect of a system’s output on it’s own input.
Bill P (B:CP) :
- INPUT FUNCTION : The portion of a system that receives signals or stimuli from outside the system, and generates a perceptual signal that is some function of the received signals or stimuli.
Bill P (B:CP) :
- COMPARATOR : The portion of control system that computes the magnitude and direction of mismatch between perceptual and reference signal.
Bill P (B:CP)
- ERROR : The discrepancy between a perceptual signal and a reference signal, which drives a control system’s output function. The discrepancy between a controlled quantity and it’s present reference level, which causes observable behavior.
Bill P (B:CP) :
- ERROR SIGNAL : A signal indicating the magnitude and direction of error.
![cid:image001.jpg@01D37ABE.36063DF0]()
RM : if for no other reason than to show how a model that controls a variable that is defined over time can be controlled. I believe that the most important way that PCT differs from other control models of the behavior of living systems is that it assumes that ALL behavior is control;
HB : How many times do we have to go through your nonsense that PCT is not about “control of behavior”. PCT is about “Control of perception”.
RM : And since control always involves the control of perception that means that simple behaviors involve the control of simple perceptions…
HB : But not in the sense that “involved” control of perception controls some “controlled variable” in external environment. At least in PCT.
RM : …and complex behaviors involve the control of complex perceptions – and these are usually perceptions that are defined over sometimes considerable amounts of time.
HB : From PCT diagram is clear that behavior is consequence of “Control of perception” so it does “involve” control in organism but the question is how as it can’t be seen continuosly. So it does not mean that we can control behavior (movements) as it’s mantra in PCT that we can’t control “output”.
So from any movement of LCS control can’t be seen. Or in other words. From single movements we can’t conclude what kind of control of perception is “involved” if we don’t see clear the purpose of behavior, because single movements (output) are not controlled. Or from single “control cycle” in control loop we can’t conclude what kind of control is “involved”. That’s why TCV is needed to understand “purposefull” behavior.
And TCV is:
Bill P (B:CP) :
The TCV is method for identifying control organization of nervous system….
There will be ambiguous cases : the disturbance may be only weakly opposed. That effect could be due not to poor control system but to a definition of actions that are only remotely linked to the actual controlled quantity.
For example : if when you open the window I sometimes get up and close it, you might conclude that I am controlling the position of the window when in fact I only shut it if the room gets too chilly to suit me. I could be controlling sensed temperature very precisely, when necesarry, but by a variety of means : shutting the window, turning up the termostat, putting on a sweater, or exercising. You are on the track of the right controlled quantity, but haven’t got the right definition yet. It is safest to assume that an ambiguous result from TCV is the fault of the hypotehsis and to continue looking for a better definition of the controlled quantity.
RM : This is one of the main reasons why Bill proposed a hierarchy of perceptions.
HB : Yes it’s about hierarchy of perceptions not hierarchy of “Controlled behaviors”.
RM : It was to account for the obviously hierarchical nature of behavior – behaviors “using” other behaviors to achieve their purposes;
HB : How behavior is used to achieve the purpose of sleeping. You are chewing all the time 2 behaviors upon which you built generality of theory. Your RCT theory is wrong. It’s hierarchical nature of perceptions, which can also “from time to time” involve behavior to achieve purposes. But hierarchical “control of perception” is continuous 24/7.
RM : …for example, using behaviors like running, throwing, catching and hitting to achieve the purpose of playing baseball – and for the fact that the behaviors that use other behaviors to achieve their purposes involve control of more complex perceptions than the behaviors that are being used; the perception controlled when “playing baseball” is much more complex (and defined over a much longer time period) than the perceptions controlled when running, throwing, catching and hitting.
HB : I don’t understand what you wanted to say ? “Perception is controlled” in all those behaviors you mentioned. You mentioned that there are purposes in all those activities ? So what is the purpose of the fielder (cathcer) in the baseball game ?
HB-B: We know that both humans and cats fail to show APAs if they are taken by surprise.
RM: Yes, I noticed that. From the perspective of my model, that would result from not setting the reference for “reach” or " bilateral arm movement" or whatever the event is.
HB : Do I understand right that there are “behaviors” that have no references ? What kind of nonsense is this ?
HB : This happens a lot in my sport, racquetball. The ideal way to take a forehand shot is to do a lot of APAs that get you into position to take it off the back wall.
HB : The ideal way to take a “forehand shot” is with continuous “Control of perception”. We discussed that a lot of times when you understood PCT in 2007. You don’t control “forehand shot” as “Control of behavior” or any other shot but at best you’ll you’ll be aware of control of perception of your arm (shoulder, elbow and wrist and so on). You’ll not be aware of all movements involved in “forehand shot”. So whether your “forehand shot” is succesfull of not, depends from how good you “Control perception” of certain parts of the body. Control will happen even if you are not aware of it. Control loops can’t function without references.
Many perceptions in your “forehand movement” are controlled “automatically”. But you can reach the most perception of the movement and control them “consciously” through changing attention. So in any sport the question is which perceptions do we control to be successsfull, not which behavior do we control for example “forehand movement”. Maybe observer will see it like that, but there will be always question what is “forehand” movement" and which “forehand movement” is right. It’s like punches in karate schools. Everything is about perception and relative experiences of people. Or as Heather pointed out :
HB-B : …and really the only way you could get that to work is hierarchical control with continuous feedback…
HB : And hierarchical control is only about “Control of perception”.
RM : But sometimes I get a shot that comes at me so fast that I don’t have time to set up for a “proper forehand shot” – no APAs needed – so I just do what I can to move the racket to the ball like a beginner.
HB : Because you don’t control right perceptions and thus “timing” on the ball is wrong. You didn’t “predict” right where the ball will be in the next moment or you didn’t “predict” the “fastness” of the ball well.
Specially in sports we mostly talk about “anticipation or prediction” in game events if we talk about successful “cotntrol of perception”. Because “prediction” increase control succecss. The talents in sport usually solve the “timing” problem with minimizing perceptual control just for ex. to wrist if we talk about table tennis or tennis etc. It depends from how much time they have and how many “right perceptions” can be included in successfull perceptual control.
RM: I hope this makes some sense because I think it would really be a great area for research on control of higher level perceptual variables – variables that are defined over time.
HB : It doesn’t make any sense, because you are talking about RCT and “Control of behavior” and some “CV”, which is controled by “Control of behavior” and the result is some “Controlled Perceptual Variable” which is unexistant in PCT.
Boris
Best
Rick
So yes, some environmental information serves to remove the surprise, kicking the control systems into gear. Is that (those) control system(s), dealing with the appearance of the target often used in the cat experiments to signal the upcoming stimulus, totally divorced from the “paw bat” ones? Should they be coupled? What happens if the expected stimulus never arrives, but the target remains? I guess there is fatigue at some point. What is the relevant question to ask?
In populations of upper motor neurons in motor and premotor cortex, there is often activity seconds before any movement is observed. What does that mean for control systems? That’s obviously not just delay. Those populations get input from… like everwhere. Motor cortex is bonkers!
On Fri, May 10, 2019, 11:59 Richard Marken csgnet@lists.illinois.edu wrote:
[Rick Marken 2019-05-10_11:53:31]
RM: Well, this has certainly been an interesting thread so far. I’m happy to see that there is a kind of consensus that the PCT explanation of apparent “anticipatory” behavior is that it is likely to be actions aimed at controlling a “higher level” controlled variable. The landslide was started by Henry Yin who said:
HY: There’s no conflict between negative feedback and anticipatory behavior. The real question is what kind of CV do you need to produce such behavior.
RM: I think this is the right question: what kind of CV would an organism be controlling that would result in your seeing such apparently “anticipatory” behavior. Martin suggests that the CV is a sequence:
MT: [Here is a] quick and dirty PCT approach. I start with the intention to bat at the target, which would set a reference for a sequence that could crudely be taken as “store energy, set trigger, wait, release energy when required”, or in a more general sense “Prepare, wait, execute”.
RM: And Erling agrees:
EJ: I rather like Martin’s proposal for controlling a prior stage in a sequence.
RM: And I agree that the CV is something like a sequence, but not like the one Martin suggests. In the case of the an anticipatory postural adjustments (APAs) seen in the cat’s reaching behavior (described in the Sheppen and Drew paper), it seems to me that the controlled variable is the “reach” itself – an event – like a “golf swing”. An event differs from a sequence only inasmuch as it is a continuously changing sequence of lower level perceptions that is defined over time. The “reach” requires making postural changes over time that get the paw to the intended destination while maintaining balance. So I see the APAs as the initial components of this “reach” event.
RM: I see these APA’s as being analogous to the initial muscular movements – for example, contraction of the diaphragm - that are involved in producing a word. These movements are not outputs produced in anticipation of a future disturbance but are the outputs in a control loop that is aimed at controlling a perception of the word. The word itself, like reach, is the controlled variable – a variable that is defined over time.
RM: Because “reach” is defined over time it looks like the initial postural adjustments that are made to control this perception are anticipatory. But I believe that they are actually just like the outputs in any control loop – continuously acting to keep the controlled variable in a reference state, protected from disturbances. If this is the case – if APAs are actually the initial outputs of a control loop controlling a variable that is defied over time – then disturbances to these APA’s will be resisted. Heather mentions some data that is consistent with this view:
NB-B: I suspect that the attached (Aruin, 2003) paper goes some way toward reconciling the “invariant, pre-programmed” feedforward conceptualization with the actual phenomenon: namely, it’s not really invariant (or, well, it’s not invariant in that there is a pre-programmed set of muscles activated in a pre-programmed way).
RM: I haven’t read the whole article carefully but apparently what Arium did was look to see whether variations in the initial the position of the body affected the nature of the APAs. And indeed it did. I see these variations in the initial position of the body as disturbances to a controlled variable (in Arium’s case it was “bilateral arm movement” rather than “reach”) and these disturbances are compensated for by the variations in the APAs.
RM: Of course, the idea that APAs are the outputs in a control loop controlling a variable defined over time has to be subjected to far more tests. And control models should be built to show that control of a higher level perception, like “reach”, can lead to behavior that “looks” anticipatory. So there’s some general ideas for PCT research that would be a great place to start for researchers interested in doing research on purpose!
Best
Rick
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.”
–Antoine de Saint-Exupery
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.”
–Antoine de Saint-Exupery