···
From: Richard Marken [mailto:rsmarken@gmail.com]
Sent: Saturday, September 17, 2016 2:06 AM
To: csgnet@lists.illinois.edu
Cc: Richard Marken
Subject: Autonomy and PCT (was Re: Math Mistakes)
[From Rick Marken (2016.09.16.1700)]
Alex Gomez-Marin (2016.09.14.1826)
​AGM: Rick, we are where we were 2 months ago when I posted my initial question. I DON’T have a generative model for the speed-curvature power law. That is why I posed the question. But you don’t have it either. All you have is basic ad-hoc reference trajectories as a function of time that you inject in your so-called demo, which is barely more than a leaky integrator of such reference trajectories, and then a plot for V and A that approaches a power law.
RM: I’ll take your argument as an opportunity to change the topic a bit. I want to talk about reference signals in PCT. The variable reference signals in my PCT model of movement have been dismissed as “cheating” and “ad hoc”. In fact, variable reference signals are the way PCT accounts for an observable phenomenon – the varying states of controlled variables – a phenomenon that is not visible unless you know the nature of control itself (see the first couple chapters of “Controlling People”).
HB : Reference signal as the way PCT accounts for observable phenomena - the varying states of controlled variables…. in outer environment DOES NOT EXIST IN PCT, because the references for the »controlled variables« are formed iniside organism and are matched with perceptions. CONTROL IS NOT HAPPENING OUTSIDE. I’ll not read your books until you’ll start writing in PCT manner.Â
Rick can’t you undrstand that »CONTROLLED VARIABLE« outside organisms is not existing in GENERAL MODEL of PCT. I don’t know what kind of model you are offering, but it’s far from being general. General model of PCT tries to explain EVERY BEHAVIOR of ORGANISMS. And your model of RCT does not explain ANY. Do you understand ???
Down is right model of PCT and you should be explaining special cases in accordance with it. HOW MANY TIMES DO I HAVE TO TELL YOU THAT. Barb, Dag. Do something ? It’s incredible that after so many year of repeating this basic true to Rick, he is still »princing« on CSGnet with his RCT.  When I wanted to leave CSGnet forum, Barb asked me to come occasionallly to CSGnet. I think that despite her friendship to Rick she is feeling that something is wrong with Rick’s theory (RCT).  Could you start telling Rick that he has to be in accordance with PCT.
You don’t need to thank me, for keeping all these years CSGnet discussions with Rick’s RCT Â in PCT frame. Just explain Rick that he has to stop with his RCT. He is misleading CSGnet, confusing everybody.
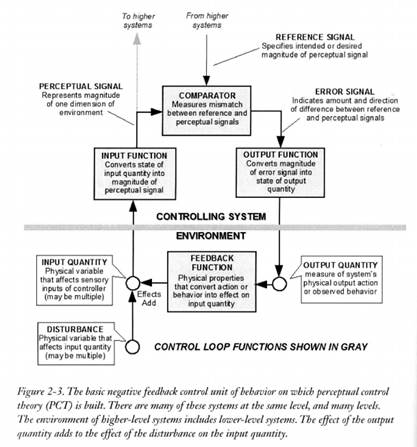
![cid:image001.png@01D1CF6C.D20A8F20]()
And this is general definiton of CONTROL in PCT. Rick, make your text in accordance with it :
Bill P.:
CONTROL : Achievement and maintenance of a preselected perceptual state in the controlling system, through actions on the environment that also cancel the effects of disturbances.
The only description I saw in last messages to CSGnet that suited this description and model of organism above was from Bob Hintz. Â And I think you should support him too in efforts to make CSGnet forum again PCT not RCT.
And now your text Rick :
RM: When people move their finger around in an elliptical trajectory,
HB : This is probably something that observer perceives ? This is probably your obervable phenomena. People don’t move their fingers arrond. Moving fingers arrond is possible only in RCT where »Behavior is control«. There is no such thing in PCT. Generaly speaking.
RM …as they do in some of thee power law studies, the most obvious variable that is being controlled is the position the finger.
HB : It’s not the position of the finger that is controlled. At least in PCT. How many times do I have to repeat that ???
RMÂ :We know that finger position is likely to be a controlled variable because it is being moved in a consistent trajectory (elliptical) in the face of variable disturbances (the changing direction of the force of gravity on the arm, for example).
HB : How many times do we have to repeat that people do not »Control their behavior« ??? You and your imagination »know« that finger position is likely to be »controlled variable«, because you want to see it that way.
RM : We also know it because movement trajectories are the controlled variable in my signature “Mind Readings” demo (http://www.mindreadings.com/ControlDemo/Mindread.html).
HB : It’s your demo and I showed you many times that your demos are wrong. Movement trajectories are the controlled variable ONLY in your signature and in your demos.
RM : PCT accounts for the fact that a controlled variable like finger position is changing over time by assuming that a reference signal inside the organism that specifies the desired position of the finger is changing over time.
HB : This is where you are missing the point all the time with your articles and demos and whatever. It’s not moving the finger that is »controlled variable« it’s perception that is controlled. You can’t control movement of your finger. That’s ordinary everyday logic. Mostly people think that they can move their legs, fingers, etc. But PCT is showing something else.
RM: The PCT model of finger movement may seem like it’s ad hoc or cheating
HB : You mean RCT model… You are not talking about PCT modell… PCT moidel shows something else. So RCT explanation is »ad hhoc« or »cheating«.
RM …because we are putting into the model a wavveform (the time varying reference signal) that corresponds to the waveform that we are trying to explain (the observed movement trajectory)
HB : In model of what ? If I understand right you are trying to explain observed movement trajectory from which view – obervers ? And to you as an observer the trajectory looks like »controlled variable« ??? Go and read B:CP again how this works.
RM. But the variations in the reference are the explanation of the movement trajectory.
HB : Not just references. The difference between reference and perception.Â
RM : The model can be seen to be less ad hoc and cheating if we introduce disturbances to the controlled variable.
HB : Which disturbances to a »controlled variable« ? How can you apply disturbances to something that don’t exist ? There is no »controlled variable« in outer environment. See Bill’s diagram (LCS III).
RM : I did this in my simulations and what you see is a model producing an elliptical movement trajectory using outputs that are quite non-elliptical. The elliptical movement is a result of the elliptical variations in the reference signal specifying the elliptical variations in the controlled variable (hand position);
HB : Hand position is not »controlled variable«…!!! All your description of controlling is part of RCT and yourr way of observing hand position !!!
RM : ….tthe non-elliptical outputs are the actions (muscle forces) that keep the controlled variable matching the varying reference signal while protecting it from disturbances.
HB : If there is »controlled variable« that muscle force is keeping than you are definitelly introducing »controlled muscle force«. So you first have to prove how you get »control of muscle force« ??? And how you can protect from disturbances hand and finger movements (»controlled variable«) in environment ??? How perception can vary arround references if it is »protected from disturbances« ??? Please show all this stuff working in LCS III diagram ?
RM: In most PCT research we study control of variables that are being kept in a constant reference state.
HB : This is not happening in PCT but in RCT, where »controlled varaible« is in outside world .Show me in PCT diagram where is »controlled variable« ?
RM : In this case, the reference signal value that accounts for the fact that the variable remains in a particular reference state is a constant, which can be estimated from the data, as in Bill’s “Track_Analyze” program (
https://dl.dropboxusercontent.com/u/31298693/Track_Analyze_01.exe).
HB : Bill did change his mind a couple times. Maybe this was his »weak point«. But overall his PCT is clearly presented in his central books (B:CP, LCS III, …). So I’d advise you using his main books.if you thiink that there is »controlled variable« in outer environment which is being maintained in »particular reference state«. This is surelly not the case in LCS III. And this is book of later date probably showing »clean« PCT. I suppose in that time Bill cleared his theory of most posible »double meanings«.
RM : But there is one nice example of research where the observed behavior involved time variations in the state of a controlled variable so that the only way to account for this behavior was using a control model with a variable reference. The research is described in:
Powers, W. T. (1989) Quantitative Measurement of Volition: A Pilot Study, In Hershberger, W. (Ed) Volitional Action: Conation and Control, Amsterdam: North Holland, pp. 315-334*
HB : I don’t know exactly what Bill wrote but from Introduction I can see that you are citated when »controlled variable« is mentioned that can »infer the behvavior of the internal reference signal«, etc. It’s probably somethinng about TCV. I think that you can find better explanations in LCS III concerning intentional (volitional) behavior. The article you mentioned is from 1989. That’s a long way back. Maybe Bill has changed his mind in some aspects. Anyway it’s better to read latter literature. There is less possibility that you’ll deviate from PCT into RCT.
RM: This paper shows how to estimate a varying reference signal from the observed variations in the controlled variable. And how, then, to evaluate the goodness of the estimate by placing that reference signal in a model and seeing how well it reproduces the observed behavior.
HB : Reference signal in a model above can’t reproduce the observed behavior. You can’t estimate varying reference signal from the observed variations in »controlled variable« in outer environment, because there is no such thing in PCT. See Bill’s diagram in LCS III. What you are talking about would be that with TCV you are trying to estimate »Control of behavior« And there again is no such thing in PCT. Behavior is produced by »error« signal. It’s hard to explain to you where you are missing the point… Sometimes you are talking in PCT manner and sometimes in RCT. Butt maybe you can get straight line in PCT from watching football ? L
RM: So varying references are a perfectly legitimate component of the PCT model. Indeed, I think they are the most important part of the PCT model, inasmuch as they account for what we see as the autonomy of behavior. Variations in reference signals account for the autonomous nature of behavior in the sense that these variations are produced by the behaving system itself – in particular, by the outputs of higher level control systems withing the behaving system – not by anything outside the behaving system. So observed variations in the state of a controlled variable, such as the finger movements studied by power law researchers, are caused by the behaving system itself – by variations in its reference signals – and not by anything outside the behaving system.
HB : As I said before. There are no variations in the state of a »controlled variable« in finger movements that could introduce »control« into controlling system from outside. And you are confirming that »Variations in reference signals account for the autonomous nature of behavior in the sense that these variations are produced by the behaving system itself… - not by anything outside the behaving system. But »observed variations in the state of a controlled variable, such as the finger movements« are introducing control into behaving system from outside in the form of so called »Controlled Perceptual Variable« or CPV which is known from RCT.
So you have to decide whether variations in reference signal are formed inside behaving system and not by anything outside the behaving system.How can perception formed from »controlled variable« outside behaving system introduce control into behaving system ? Through »Controlled Perceptual Variable ???
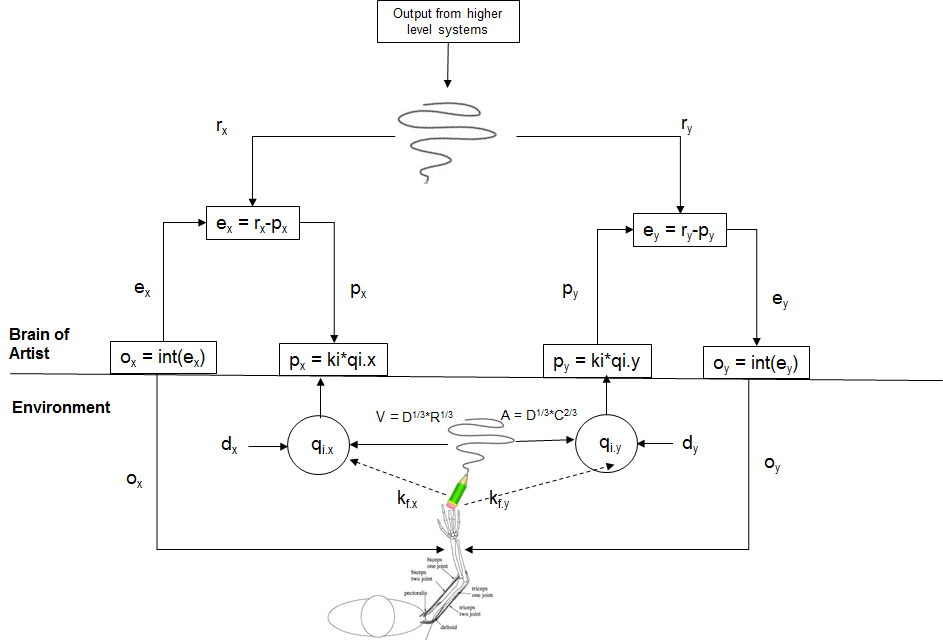
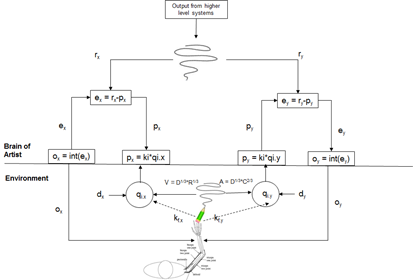
RM: Here, again, is my PCT model of movement trajectories:
![Inline image 2]()
HB : I’ve already explaned to you what is wrong with your RCT model above. This is not how organisms work. You are inventing your theory of how organisms work. It’s totaly wrong. It would be nice if you move your RCT into some other forum where »behavior is control« and where are »controlled variables« in outer environment. There is no such thing in PCT.
RM: I’ve tested this model against my own behavior and it works quite well, as you might expect.
HB : You could test whatever you want under conditions of your theory. It will always work as you have RCT references for the perception. You see what you want to see, not what is happening according to PCT. If you would have PCT references for the perception than you would see everything in different »dimension«. Maybe as I see it.
RM : The estimates of the reference signal variations in the model were based on the observed variations in the controlled variable (the 2-D position of the cursor).
HB : It’s not controlled (observed) variable, but you can ESTIMATE from changes in variables in environment the variations in reference signal. The estimation is more difficult if you see somebody doing something that you don’t understand or you understand it with RCT.
RM : This may still seem like a trivial accomplishment. But it does suggest further directions for research.
HB : It’s wrong direction of further research in PCT. But it’s probably right for RCT.
RM: One such direction would be to to ask why the reference state of the controlled variable varied the way it did.
HB : The state of which »controlled variable« ?
RM : This is a question about what higher level variables might be kept under control by the way the x,y position of the moved object (a cursor, for example) varies. I can think of two candidates: velocity and curvature. Both of these variables are consequences of movement in the x,y dimension (that’s why it’s wrong to think of curvature as an independent variable and velocity as a dependent variable; when people make purposeful movements, both the velocity and curvature of the movement are consequences of the outputs (o.x and o.y in the diagram) that produce the movement).
HB : First I can hardly imagine that everything in the »reality« moves in two-domentional space. And the second problem is that you don’t understand overall how internal control structure of the organism works. It’s not finished yet. Even worse, It has many possible solutions. Which you’ll peak up ???
RM: It would take some ingenuity to determine whether the velocity and/or curvature of movement is controlled when a person draws a shape or writes their name.
HB : Right. A lot of imagination is needed. But I can confirm that movement is not controlled.
RM : It would require introducing disturbances to the speed and curvature of the movement to see if there is correction of these disturbances.
HB : You are trying to implement TCV ??? But how can you introduce disturbances to a »controlled variable« if it is »protected from disturbances« ??? J
RM : This could all be done in the context of a model, such as the one I used to explain coordinated movement( http://www.mindreadings.com/ControlDemo/Coordination.html)
HB : He,he you can dream of it. All your demos base on the same paradigm : behavior is control → changes in controlled variable in outer environment → Controlled perceptual variable. And this have nothing to do with PCT. It’s RCT.
RM : ….where the references for movement velocity and cuurvature (assuming these variables are controlled)
HB : The assumption is wrong.
RM : …seet the reference signals for the x,y position of the moved object.
HB : This can happen probbaly just in your imagination.
RM: This is the way I would approach the study of how people produce movement trajectories.
HB : Well this way is wrong. It’s the part of the theory that is promoting »Control of behavior« and there is no such thing in PCT.
RM : I think it’s the way Powers would, too, but, then, I’m a non-scientific, non-physicist so what do I know;-)
HB : It’s obviously that Powers would do it in another way. See his diagram in LCS III. It would be nice if you’d stop hiding your RCT behind PCT.
You know a lot Rick. But you are mixing the main points. I know I could help you, but you prefer watching football. So what can I do ?
Now seriously. I think that colaboration on CSGnet is necesary if the PCT should be preserved and possibly upgraded. Bill’s knowledge was so wide that it can’t be replaced by one person. And that’s what I think Rick you are trying to do. Replace Bill. That is impossible and I hope you’ll understand this before it’s too late.
Beside that you are wrongly advising Powers ladies. If you would moderate in the direction of integrating all oppinions here on CSGnet you would be a winner. But you are trying just to oppose all oppinions, not »protect« you from disturbances. You are trying to »eliiminate« anybody who »shows error« to your RCT.
One conversation with Martin seemed constructive. It seems that you learned something. But now it seems that you try to push through your RCT again.
I see incredibe potentials in PCT like Henry Yin, and newcomer Roger, Martin, Bruce, Bob, Frank …. They could ffit in Rick if you would not be such a »solo, egoistic player« and if you would not control for being the smartest PCT master trying to oppose anybody who a little deviate from your references (RCT). Lower the gain (be more tolerant). Maybe you could rather change references instead of reducing errors toward your references. You said it for yourself that varying references are important. I agree.
I can only advise you that you can start reading ups sorry studying Bill’s books when you don’t watch football. I’m still reading his books. And it does help J.
Best,
Boiris
Best
Rick
*I hadn’t looked at that paper in years and I was surprised to see that two of the three references at the end of the paper were to papers by yours truly. I feel retrospectively honored since I know that Bill used very few scholarly references in his papers. So to have two out of three of his references be to my work is really an honor. Of course, that was before I turned into a traitor to PCT so don’t believe anything you read in this post;-)
–
Richard S. Marken
“The childhood of the human race is far from over. We have a long way to go before most people will understand that what they do for others is just as important to their well-being as what they do for themselves.” – William T. Powers