Hi Eetu
EP: An object or point can move with a stable speed absolutely independently of its direction of movement AND of the changes of its direction of the movement.
RM: True.
EP: A quick change of the direction of the movement is a turn or angle, a slower change of direction is a curvature. This is a basic mathematical and logical truth which should not be muddled up by such complicated subtleties as affine velocity etc.
RM: The muddling results from the fact that the power law relationship between curvature and velocity is determined by regression analysis on variables that are mathematically related. Power law researchers understand this and that the results of this regression depend on the variance of an “omitted variable”, affine velocity. And they knew this before I did (see references below) They just come to a different conclusion than I do about the implications of that fact.
RM: The different conclusions of the power law researchers come from not understanding that the movements produced by living organisms are controlled results of muscle forces. They still think of movement as results that are produced open loop and that the observed power law relationship that characterizes these movements results from environmental constraints on movement generated open-loop. Why they are interested in PCT is, therefore, beyond me.
EP: As Adam wrote: “the ‘physical’ meaning of the speed-curvature power law - when the curvature is high (‘corners’ of the ellipse) the speed will tend to be lower than when the curvature is low (‘flat parts’ of the ellipse).
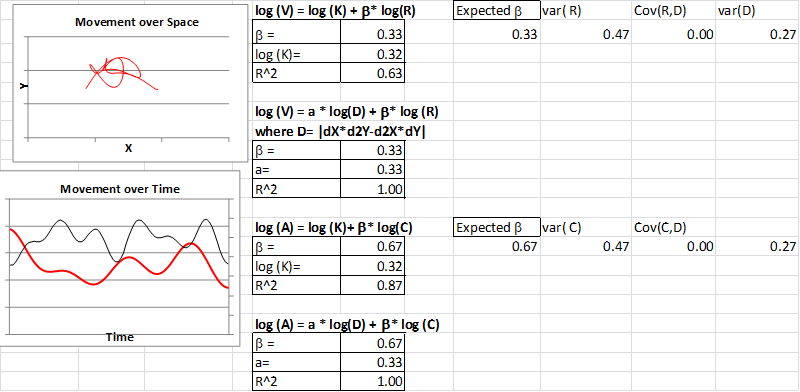
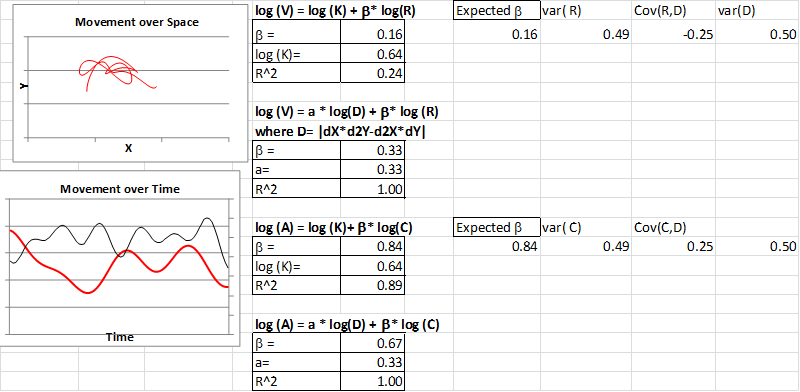
RM: Which is true as long as the R^2 for the regression derived power law relationship between the measures of velocity and curvature is close to 1.0. In that case, speed (measured as tangential, V, or angular, A, velocity) is lower when curvature (measured as radial, R, or degree of, C, curvature) is high. That is really happening physically in that case, in the sense that V, A, R and C are functions of physical variables. But there is no physical law that is making this happen. Nor is there any behavioral law making this happen.
EP: And this does not happen always,
RM: RIght! The power law relationship only happens when the affine velocity in the movement under study is uncorrelated with the measure of curvature used in the regression analysis.
EP: so it is not any mathematical dependence but a real physical
RM: The mathematical dependence between measures of speed (V,A) and curvature (R, C) does reflect a real physical dependence since the variables V,A,R and C are measures of movement based on actual physical movements (the time changes in the X and Y coordinates of the moved entity). But those measures – V,A, R and C – are unquestionably mathematically dependent:
![]()
![]()
RM: which means that any observed relationship between V and R or A and C depends on how a third variable, D (affine velocity) varies.
EP: and explanation requiring phenomenon.
RM: And I have provided one: The power law is a statistical side-effect of regression analysis with the variable D omitted. The results of the regression depend on what movement the organism is producing on purpose (i.e. controlling for), not on how that movement is produced.
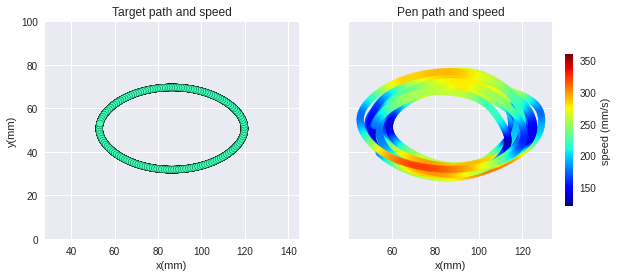
RM: The only explanation of the power law that I have seen from the power law people is that the power law results from the open-loop production of trajectories that follow a power law. This figure from M & S, 2018 shows that this explanation is wrong:
Best
Rick
References
1.Pollick F, Sapiro G (1997) Constant affine velocity predicts the 1/3 power law of planar motion perception generation. Vision Res , 37:347–353
2. Maoz U, Portugaly E, Flash T, Weiss Y (2006) Noise and the 2/3 power
law. Adv Neural Inf Proc Syst 18:851–858