The question is what is collective control and how do we model it. Eventually we’ll work our way to the topic of different kinds of beliefs.
Yes, the feedback function is a mathematical expression in a model. I am talking about phenomena and you are talking about a model of phenomena. You ask how the environmental feedback function for collective control can possibly differ from the environmental feedback function for control in an unpopulated environment.
The environmental feedback function is a mathematical expression representing a causal relationship between control outputs into the environment and environmental effects upon the sensory inputs of the same control system. Typically, this involves only immutable physical laws, that is, mathematical representations of causal relationships which are completely dependable. F=MA and so forth. Any factor in the transmission from control output to controlled sensory input which is not derived from completely predictable physical law is a disturbance.
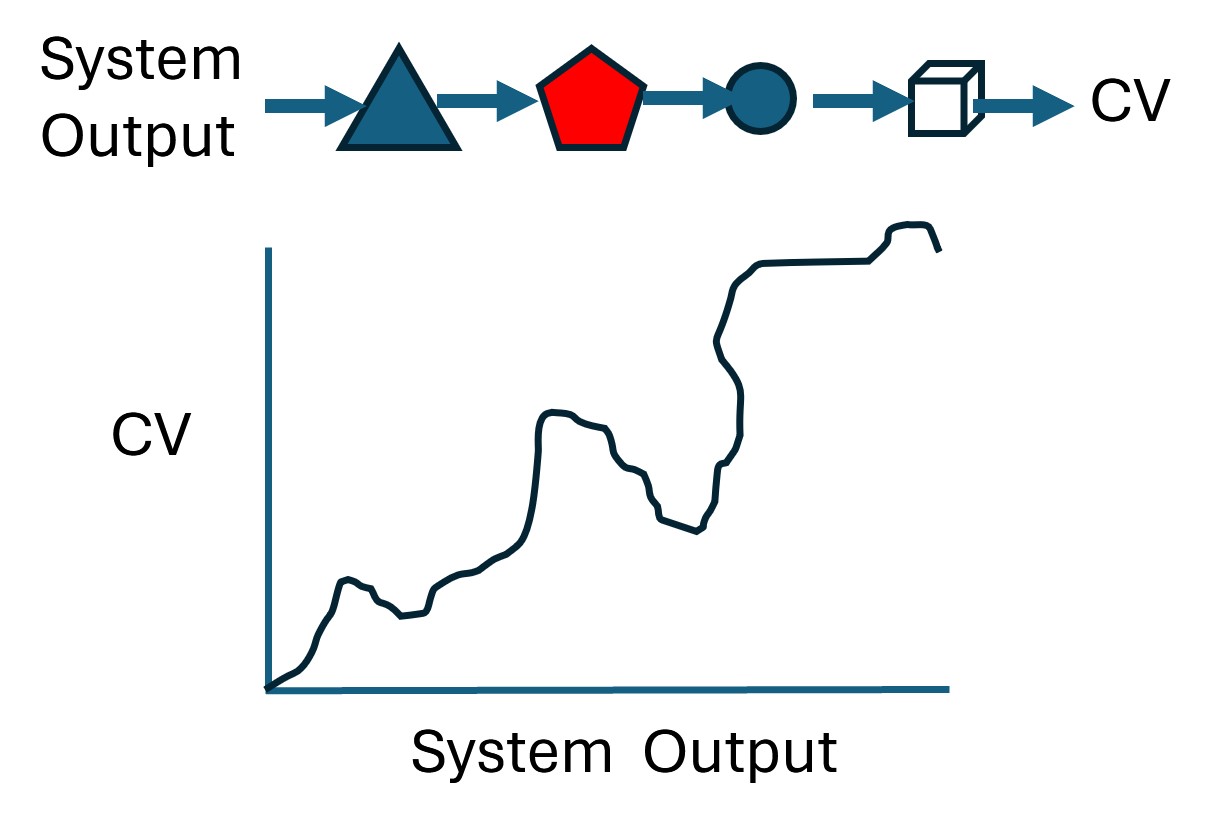
When you talk about a model of control phenomena, the output side of the environmental feedback function is Qi. You say that Qi is the CV.
Getting measures of Qo and Qi for participants in social phenomena is usually impractical and can be unethical, and it certainly cannot be required of me in this discussion. Fortunately, control is an observable phenomenon which we can verify without measuring Qi and Qo and without expressing the physics of the environment between control output and sensory input mathematically as an environmental feedback function. And, fortunately, we have a long and honored history of investigating control on those terms in this research community.
When we observe control, the CV is observed in the environment. There are links of cause and effect between the subject’s output and the CV. This is one side of the environmental feedback path. There are also links of cause and effect between the CV and the subject’s sensors, the other side of the environmental feedback path. A fundamental task in the TCV is to employ the corresponding sensors and to arrange matters to ensure that your environmental feedback path from the CV has the same effect on your sensors as the corresponding path has for the subject’s sensors. So already there’s a lot to consider out there in the environment. In the modeling point of view as represented by your diagram of an environmental feedback function there are no environmental factors between Qi and the sensors, and the CV is not represented separately from Qi.
Disturbances may intrude directly on the CV, or at any point in either side of the environmental feedback path. In the TCV, one test is to interrupt the environmental feedback path between the putative CV and the subject’s relevant sensors and observe whether that interrupts control. In practice, unless the subject is constrained by accepting artificial constraints in an experimental situation, the subject very probably will act to remove the obstruction. In general, elements of the environmental feedback path may themselves become controlled variables if, due to some disturbance to them, their efficiency in transmitting energy from outputs to CV or from CV to sensors is degraded. This is an important factor in collective control to which we shall return.
There may be many links in an environmental feedback path. They may be represented by distinct mathematical expressions within the environmental feedback function (a mathematical expression representing the cause-effect relation of control system output to input through the environment). The little polygons in your diagram presumably represent distinct mathematical expressions within the environmental feedback function.
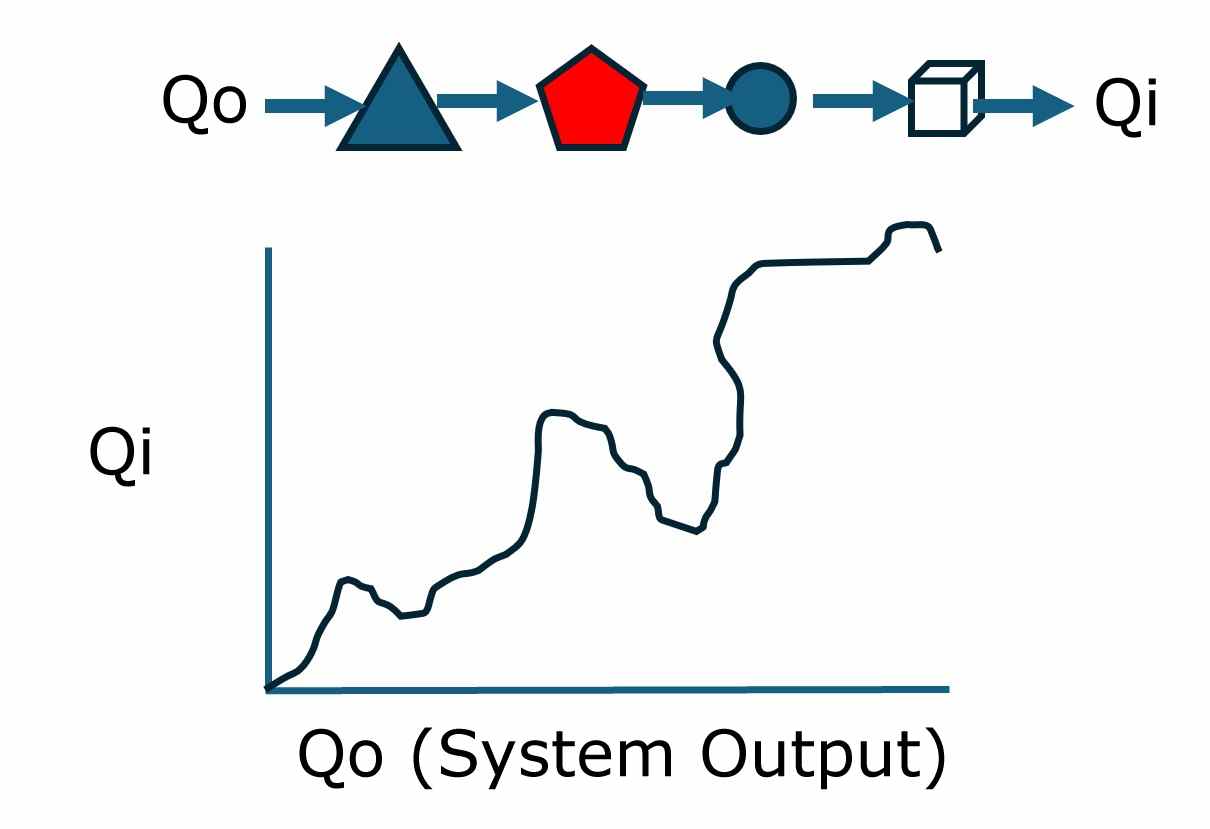
I have taken the liberty of labeling the axes with the appropriate variables for the control system equations (
B:CP p. 274 of the 1973 edition). The relevant equation of the four is

Ke (with subscript e) is the constant K representing the instantaneous ‘steady-state condition’ of the environmental feedback function.
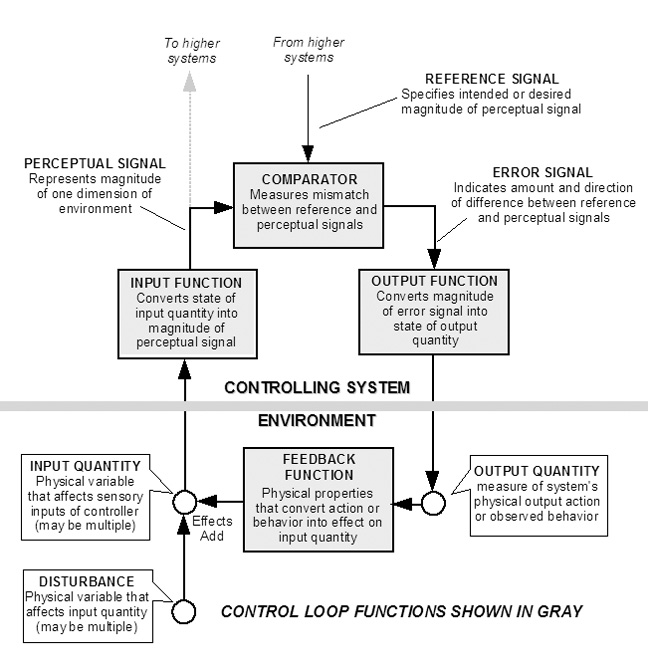
However, the little polygons in your diagram cannot include any causal links between the CV and the sensors for reasons that are explained above and illustrated in a canonical diagram of an elementary control loop:
In the modeling point of view exemplified here and in your diagram the CV that we observe in the environment does not exist. It melts away into a cloud of “physical properties that convert action or behavior into effect on input quantity”.
This omission of the environmental CV from the equations, diagrams, and terminology of the modeling point of view is the source of countless muddled disputes on CSGnet as to what is controlled, and whether the CV is the perceptual signal p, the input quantity Qi, or that in the environment which the subject, the experimenter, and others present verify to be controlled. The very existence of an ECV or CCEV has been denied. Just because our senses are our only means of knowing it is there does not mean that it is not there. To me, it is patently obvious that all three are controlled, because control brings all three into correspondence. If we look for which causes the controlled condition of the others, we can only say that the functioning of the control loop as a whole is causative, reducing its error output to zero.
There may be many links in an environmental feedback path. An obvious example that presently exists is a Waldo on the output side and magnifying imaging equipment on the input side as equipment for a neurosurgeon.
The stability of the links in the environmental feedback path is important. An unstable link in the environmental feedback path degrades control. I once drove a car with worn steering linkage across country coast to coast. The steering linkage was worn, resulting in a control-free gap of 3-4 inches between pressure to steer to the left and pressure to steer to the right. In a small town, a fellow driving an MG convertible wanted his passenger to hand something to one of my riders in the back seat reaching out through the window. His steering linkage was nice and tight, precise control. I could ease my car close to his, but a bump in the road could make the wheels turn left toward him ahead of the pressure I was applying to the steering wheel, and to correct I would have to move through several inches before corrective pressure to the right made contact, and overshoot was likely. He kind of scoffed at what a nervous driver I was. I told him if he could see the play in my steering wheel he’d be nervous too. That control-free gap between pressure to steer to the left and pressure to steer to the right was not a source of disturbance, it was a property of that link in the environmental feedback path between the output of my arms and hands on the steering wheel and the direction of motion of the car, a property which degraded the precision of my control. Because it degraded the gain in that control loop, I was unable to resist environmental disturbances as well as I wanted to. The deficiency of that car, localized in the steering linkage, itself became a controlled perception. I was glad to find a replacement vehicle for use in the many environmental feedback paths that required me to drive someplace.
This illustrates the importance of distinguishing disturbances from properties of links in the environmental feedback path that affect their efficiency and efficacy as links transmitting energy of outputs to a CV or transmitting energy which (at the end of the path) is perceived as the variable state of the CV. It also illustrates that we control perceptions of the links in an environmental feedback path, and perceptions of how well they serve that function in our control.
A great deal of the field of collective control concerns aspects of the environment that people make use of as links in the environmental feedback paths of various control loops. Much of the passage about work that I have quoted from Kent’s chapter concerns the creation and maintenance of such artifacts. Perhaps you could now go back to earlier posts in this topic and reconsider them from this point of view.