[Martin Taylor 2019.03.24.11.07]
The first and subsequent newspaper reports on the Lion Air and Ethiopian
Air crashes have focused on the lack of pilot training on the modified
737, and in particular its MCAS software system. Some have suggested
that a sensor for the plane's attitude malfunctioned similarly in both
cases. I believe the problem lies elsewhere, in the time-constants of an
unnecessary feedback loop between the control of the perceptions of the
plane's attitude by the software and the pilot, coupled with the fact
(as reported in one paper today) that the MCAS system cuts in when the
plane pitches nose-up beyond a threshold.
It happens that I discussed an analogous problem and its solution from a
PCT viewpoint at a Symposium of the NATO Advisory Group on Aviation
Research and Development in 1992. The actual talk was about how best to
integrate the use of voice interaction with other means of interacting
with the aircraft, but previously several speakers had talked about the
general distrust of automated systems by pilots. Accordingly, I
discussed the issue, but could not include it in the previously
submitted text of the talk, which had been required by the interpreters.
My addendum to the talk was, however, published in the final Symposium
publication (attached). It starts on page 11.
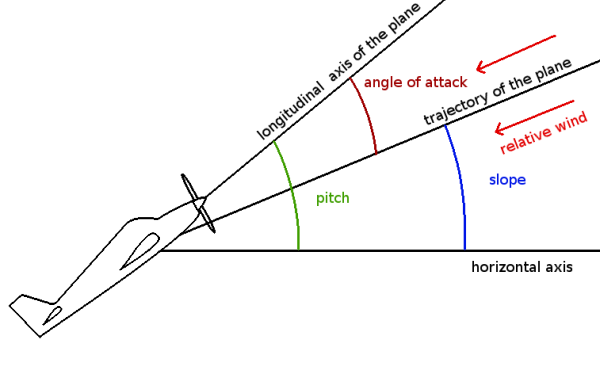
The essence of the problem is that the pilot and the automation both are
attempting to control the same environmental variable (aircraft nose-up
angle). They are trying to control it to the same reference value, but
they do not have the same time-scale of their feedback loops through the
plane's flight dynamics. In a linear system, this would not matter, but
in a non0linear system the result is a newly introduced "beat frequency"
in the actual pitch angle that is the difference between the inverses of
the two individual loop transport lags (there's also a beat frequency
that is the sum, but I would not think the loop gain for that one would
exceed unity). If the loop gain through the two controllers is positive
and greater than unity, the effect would be an exponentially increasing
attitude (and altitude) oscillation of the kind reported in the newspapers.
But that's not all. If it is true that MCAS only cuts in when the
nose-up attitude is beyond some criterion value and then cuts out again
when the plane's pitch angle becomes safe, the effect would be like that
of a simple conflict such as a tug-of-war when one of the competitors
suddenly drops the rope. In a real tug-of-war, the team still holding
the rope would stagger backward and fall down as if they had been
suddenly pushed with the same force with with the other party had been
pulling. In the MCAS situation, there is no overt conflict since both
pilot and MCAS had the same reference value, but there would be a sudden
change in the loop gain, which the pilot would sense as "jerk" (rate of
change of acceleration of a variable) for which he would be likely to
experience as a new disturbance that reduced the pitch control loop
acceleration at the root of his pitch control hierarchy. His
compensating action would be to add a compensating increase in the pitch
acceleration (the elevator flap angle), driving the nose of the plane
down faster than would allow for stopping the change of pitch when the
plane reached its reference attitude (a climb out of the airport).
The effect of such an MCAS threshold would be similar to the effect of
the small pushes a parent gives a child's swing, increasing the
amplitude of the swing over several swings back and forth. In the MCAS
situation, however, the "parent" would be giving a harder push each time
the threshold was passed for it to come into action, leading again to an
exponential increase in the amplitude of the pitch excursion.
My 1992 solution to this problem was twofold. Firstly, I assumed that
the automated system would have no threshold, but the pilot could have
control over his/her own loop gain, while the automated system would
adjust its own loop gain by sensing the control force being applied by
the pilot, reducing .its own gain as the pilot's applied force
increased. A side-benefit of this arrangement is that by changing a
parameter the same arrangement could be used for training new pilots.
You can read what I actually said about it in 1992 in the attachment.
I assume Boeing engineers understand the nature of the problem very well
by now, and it may well not be as the newspapers describe. If it is,
they understand dynamics a lot better than I do, and should b able to
solve it in their own way. But I though it might be useful here to
suggest how PCT could anticipate and solve a potential problem a quarter
of a century before it actually happened and killed so many people.
Martin
PS. There is a "mental typo" in the middle of the first paragraph of the
"Feedback" section on p21-7, where "reference belief" should have been
"perceptual belief".
AGARD92_IntegratingVoice.pdf (1.52 MB)