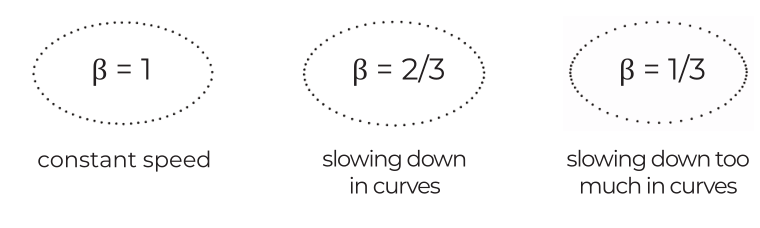
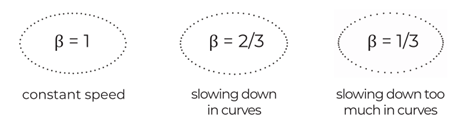
RM: No, your illustration is no illusion; the points are really closer together in the more curved parts of the middle and right trajectories. When I say that this doesn’t reflect “slowing down through curves” I mean it doesn’t reflect slowing down in response to curvature. The power law is written as an equation with speed as the dependent variable and curvature as the independent variable. The implication is that the instantaneous speed of movement depends on the degree of curvature through which the movement is being made. But, in fact, the speed and curvature of voluntary movement are both dependent variables; they are dependent on the sum of muscle forces and force disturbances that cause them.Â
RM: The dictionary says that the word “trajectory” refers to the path through which an object moves; a fly ball moves through a parabolic trajectory, for example. But I presume that when you talk about voluntary movement, you are using “trajectory” to refer to both he path through which something is moved as well as its velocity at each point in the path. The instantaneous positions of a movement are then the positions of, say, the wrist at each successive instant of a movement.
RM: I meant to say velocity profile, not trajectory profile. Atkeson and Hollerback found that the shape of these velocity profiles is invariant with respect to the speed and shape of the path of the movement. It is these “invariant” velocity profiles that Bill is referring to as the “trajectories” that are a side-effect of control. These invariant velocity profiles are precisely equivalent to the invariant power law relationship between curvature and velocity of movement; both are side effects of control.Â
RM: I’ve copied below a post from Bill where he gives a more detailed discussion of velocity profiles and their relationship to PCT. I have bolded what I think are some of Bill’s most important comments that are directly relevant to the power law research. And note the subject head of the post: Controlled variables vs. side effects. I’m afraid you are going down the same blind alley as the one taken by Atkeson and Hollerback; the blind alley that is the study of side-effects of control. I’m trying to coax you out of that blind ally and into the stately corridor of research aimed at discovering the variables around which movement behavior is organized: controlled variables. But if you ever decide that you would like to study movement behavior from a PCT perspective I’m always there to help.
···
=================================
From: “William T. Powers”
POWERS_W@FORTLEWIS.EDU
Subject:Â Â Â Â Â Controlled variables vs. side-effects
To: Multiple recipients of list CSG-L CSG-L@vmd.cso.uiuc.edu
[From Bill Powers (950527.0950 MDT)]
Â
Just got back from seeing our
daughter Barbara off in the start of the
Iron Horse bike race, Durango to
Silverton. The length is 45 miles, the
total climb over two main passes is
5500 feet (the highest pass, Molas,
is about 11,000 feet). Last year
(her first, at age 35) she did it in
4:20; this year she hopes for under
4:00. The pro winning time last year
was 2:10. She should be about
halfway right now, starting the four-mile
climb to Coal Bank Pass (2500 foot
climb to over 10,000 ft). Go Bara!
Rick Marken, Bruce Abbott
(continuing) –
===================================================
When you push on a control system,
it pushes back.
===================================================
RE: trajectories vs. system
organization
Â
In a great deal of modern behavioral
research, trajectories of movement
are examined in the hope of finding
invariants that will reveal secrets
of behavior. This approach ties in
with system models that compute
inverse kinematics and dynamics and
use motor programs to produce
actions open-loop. These models
assume that the path followed by a limb
or the whole body is specified in
advance in terms of end-positions and
derivatives during the transition,
so the path that is followed reflects
the computations that are going on
inside the system.
Â
It is this orientation that explains
papers like
Â
Atkeson, C. G. and Hollerback,
J.M.(1985); Kinematic features of
unrestrained vertical arm movements.
The Journal of Neuroscience 5,
#9, 2318-2330.
Â
In the described experiments,
subjects move a hand in the vertical plane
at various prescribed speeds from a
starting point to variously located
targets, and the positions are
recorded as videos of the positions of
illuminated targets fastened to
various parts of the arm and hand.
Â
The authors constructed a
tangential-velocity vs time profile of the
wrist movement for various speeds,
directions, and distances of
movement. They normalized the
profiles to a fixed magnitude, then to a
fixed duration, and found that the
curves then had very nearly the same
shape. Using a
“similarity” calculation, they quantified the measures of
similarity.
Â
They were then able to compare these
normalized tangential velocity
profiles across various directions
and amounts of movement and show that
the treated profiles were very close
to the same. They conclude:
Â
    Taken
together, shape invariance for path and tangential velocity
    profile
indicates that subjects execute only one form of trajectory
    between any
two targets when not instructed to do otherwise. The
    only
changes in trajectory are simple scaling operations to
    accomodate
different speeds. Furthermore, subjects use the same
    tangential
velocity profile shape to make radically different
    movements,
even when the shapes of the paths are not the same in
    extrinsic
coordinates. Different subjects use the same tangential
    velocity
profile shape.
Â
    … this
would be consistent with a simplifying strategy for joint
    torque formation
by separation of gravity torques from dynamic
    torques and
a uniform scaling of the tangential velocity profile
    …Â
(p. 2325)
Â
    … if the
motor controller has the ability to fashion correct
    torques for
one movement, why does it not use this same ability for
    all
subsequent movements rather than utilize the dynamic scaling
    properties?
Among the possibilities we are considering, the first
    is a
generalized motor tape where only one movement between points
    must be
known if the dynanmic components in equation 6 are stored
   Â
separately…A second possibility is a modification of tabular
    approaches
[ref] where the dimensionality and parameter adjustment
    problem
could be reduced by separate tables for the four components
    in equation
6. (p. 2326)
Â
This paper was sent to me by Greg
Williams as a source of data about
actual hand movements, for
comparison with the hand movements generated
by Little Man v. 2, the version
using actual arm dynamics for the
external part of the model. The
model’s hand movements were, as Greg
will attest, quite close to those
shown in this paper, being slightly
curved lines connecting the
end-points. Forward and reverse movements
followed somewhat different paths,
and by adjustment of model parameters
this difference, too, could be
reproduced.
Â
What is interesting is that the fit
between the Little Man and the real
data was found without considering
tangential velocity profiles or doing
any scaling or normalization. In
other words, the invariances noted by
the authors were simply side-effects
of the operation of the control
systems of the arm interacting with
the dynamics of the physical arm. In
the Little Man there is no
trajectory planning, no storage of movement
parameters, no table-lookup
facility, no computation of invariant
velocity profiles. The observed
behavior is simply a reflection of the
organization of the control system
and the physical plant.
Â
The path which Atkeson, Hollerbach
(and many others at MIT and
elsewhere) are treading is a blind
alley, because no matter how
carefully the observations are made
and the invariances are calculated,
there will be no hint of the
control-system organization, the SIMPLE
control-system organization, that (I
claim) is actually creating the
observed trajectories. No doubt a
sufficiently complex trajectory-
control model, with just the right
tables of coefficients and velocity
profiles, would ultimately be able
to match the behavior. But this line
of investigation, with its
underlying assumptions, will never lead to
the far simpler and anatomically
correct PCT model.
Â
In terms of the current discussion
on the net, the observations made by
the authors were interesting as
checks on the model, but were actually
irrelevant to what the control
systems were doing. The control systems
(the first two levels of the Little
Man model) controlled only three
kinds of variables that underlay the
perceptual signals: angular
positions, angular velocities, and
angular accelerations. They received
no information about wrist position
in laboratory space. They contained
no provision for computing
tangential velocities, or for computing
positions of points on the physical
arm in space, or for computing
space-time invariants. The behavior
of the control systems, in other
words, took place in a
proprioceptive perceptual space that no outside
observer could see. In order to
translate from this perceptual space
into variables that were observable,
the computer program generated the
resulting arm positions and plotted
them in a form suitable for visual
inspection. So a side-effect of the
actual control process was presented
for comparison with a corresponding
side-effect of the real control
process, as visible to an outside
observer.
Â
The approach of Atkeson and
Hollerbach appears in many guises. We have
already talked about the apparent
scaling and normalization of
trajectories seen when two hands
move rapidly and simultaneously to
targets at different distances. In
operant conditioning experiments, we
have seen how the control of
reinforcement by behavior is obscured by
the fact that variations in behavior
tend to stabilize reinforcement
rates, thus making reinforcement
rate appear to be the independent
variable.
Â
We have also seen a few – a very
few, so far – studies in which the
PCT orientation was used,
Srinivasan’s being the most recent. What is
the difference? I think the
difference is in whether the emphasis is on
seeing the behavior from the
behaving systems’s point of view, as best
we can imagine it, and seeing it
strictly from the human observer’s
point of view.
Â
from the human observer’s point
of view, it seems that we must account
for the detailed movements and
physical interactions that are seen to
occur. This leads to trying to find
invariances or striking mathematical
regularities of some sort in the
observed behaviors. It leads to
imagining an internal system that is
producing explicitly what we are
observing; if we observe a
trajectory, there must be some generator that
is specifically calculating that
trajectory.
Â
But from the behaving system’s point
of view, we can consider only the
information that is available to the
behaving system; we must look for
our explanations there. The
trajectories of movement that result from
the system’s operation are basically
side-effects; they are not planned
and they are constant only in a
constant environment. Furthermore, they
are unknown to the behaving system
and play no part in the production of
behavior. We can deduce from the
model of the behaving system what the
observable side-effects would be in
a given environment, and so can
compare those side-effects with our
external observations of the
behavior. But our explanation of the
behavior is not based on those
side-effects.
Â
Most important, when we simply
describe behavior as a sequence of
physical happenings and
relationships, we have no way of knowing whether
we are describing controlled
variables or side-effects. When we see a
fly landing on a ceiling, it is perfectly
possible that NOT A SINGLE
ASPECT OF WHAT WE SEE is perceived
and controlled by the fly. When we
see the fly extending its legs just
prior to landing, the fly may have
no perception of the configuration
of its legs; to the fly, all that is
controlled may be two or three
joint-angle signals, not even identified
by the fly as representing joint
angle. When we see the wings stop
flapping, to the fly all that may be
controlled is a sensation of
vibration. When we see the fly’s
body making a steep angle with the
surface, the fly may simply be
experiencing a visual signal indicating,
as Rick guessed, a gradient of
illumination or texture. Not one of the
variables we are observing may ever
appear in the ultimate model of the
fly’s internal organization, just as
in the Little Man the actual arm
configuration and hand position
never appear in the model of the first
two (kinesthetic) levels of control.
Once we have the right model, we
can always compute how its operation
will appear to an observer who is
focusing on various side-effects of
the actions. But the model itself
says nothing about those
appearances, and makes no use of them.
Best to all,
Â
Bill P.Â
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery