I don’t find this easy to follow, but it appears to me that the negative feedback loop design has been dismissed because (a) it is not known that integration occurs in the output signal, (b) no consideration of a hierarchical arrangement has been made and (c) the authors are also unaware of reorganisation within a control unit. So they have had to resort to an efference copy approach. Without really dissecting the evidence though I couldn’t say for sure that a PCT model could do it!
PS how was my answer to the speed curvature power law?
Warren
···
On 7 Jul 2016, at 17:47, Alex Gomez-Marin agomezmarin@gmail.com wrote:
[http://bjoern.brembs.net/download/the-sensory-motor-link-in-motion-dependent-flight-control-of-flies/?wpdmdl=1332](Proofpoint Targeted Attack Protection
2Dsensory-2Dmotor-2Dlink-2Din-2Dmotion-2Ddependent-2Dflight-2Dcontrol-2Dof-2Dflies_-3Fwpdmdl-3D1332&d=CwMBaQ&c=8hUWFZcy2Z-Za5rBPlktOQ&r=-dJBNItYEMOLt6aj_KjGi2LMO_Q8QB-ZzxIZIF8DGyQ&m=V_Louk79a-tW1SC-qn_Unz7vxdCEds3QzPzovYPH8lQ&s=nCuRFmxyoM2Dvo8ID-sayxjSey_q1PTMUXg3KPzI7PM&e=)
Again, dear PCTers, rather than trying to fill in the checkbox for PCT items, one may appreciate the virtues of that work, not only in terms of what is claimed but also in terms of what is done. I had a long conversation on Skype with Brembs the other day. We need many more works like this, and people like that. We are all trying to understand the phenomenon of behavior.
···
On Thu, Jul 7, 2016 at 10:30 PM, Warren Mansell wmansell@gmail.com wrote:
I don’t find this easy to follow, but it appears to me that the negative feedback loop design has been dismissed because (a) it is not known that integration occurs in the output signal, (b) no consideration of a hierarchical arrangement has been made and (c) the authors are also unaware of reorganisation within a control unit. So they have had to resort to an efference copy approach. Without really dissecting the evidence though I couldn’t say for sure that a PCT model could do it!
PS how was my answer to the speed curvature power law?
Warren
On 7 Jul 2016, at 17:47, Alex Gomez-Marin agomezmarin@gmail.com wrote:
Sure thing, and I agree the data is very helpful. I can’t help myself thinking what could have been done instead with the full toolbox of hierarchical control, reorganisation, smoothed integration etc, but it’s of course only lip service unless I put it together into a viable and competitive alternative model. Let me think…
···
On Thu, Jul 7, 2016 at 10:30 PM, Warren Mansell wmansell@gmail.com wrote:
I don’t find this easy to follow, but it appears to me that the negative feedback loop design has been dismissed because (a) it is not known that integration occurs in the output signal, (b) no consideration of a hierarchical arrangement has been made and (c) the authors are also unaware of reorganisation within a control unit. So they have had to resort to an efference copy approach. Without really dissecting the evidence though I couldn’t say for sure that a PCT model could do it!
PS
how was my answer to the speed curvature power law?
Warren
On 7 Jul 2016, at 17:47, Alex Gomez-Marin agomezmarin@gmail.com wrote:
Hi Alex and CSGers, I have read this ‘classic’ paper now and I hope you will engage me in a discussion. It may be classic and show a lot of hard work empirically but in terms of model building it seems very poor to me. What do you guys think?
The experiments are hugely impressive and I had no idea there was such a body of research out there. There certainly seems enough data to build some kind of model! I have three sets of comments. First about the characterisation of the ‘old’ feedback model which I hope to distinguish thoroughly from PCT. Second about the alternative model. Third, how we might start to produce a PCT model.
So, the 11a figure is actually a fairly accurate representation of an individual control unit in PCT with the reference signal internal which is funny as PCT is not mentioned. However, it is only one unit. Given the various potential perceptual variables discussed in the article, one would expect these to be controlled too, but of course one unit on its own cannot show this. Related to this point, the most likely configuration of multiple units is a hierarchy, and this is not shown as an option. The diagram also does not reveal that the motor signal in PCT is always passed through a leaky integrator and a gain applied. Finally the diagram does not show how reorganisation can modify the change in parameters of control units on a random basis when error persists.
Turning to the proposed model, I like the fact that it is more complex! It includes the torque spikes which seems sensible. However there are several issues. First, locating the world inside the fly seems odd but let’s let that pass. Second, this diagram still does not include all the perceptual variables hypothesised in the article. So it seems incomplete. I can’t see how it could be run mathematically to compare to observed behaviour. It is also hard to see where any negative feedback control is occurring even though this is acknowledged in the article.
My initial steps to make a PCT model would be to identify all the potential perceptual variables (see below) and the potential motor outputs (yaw torque and thrust) and then consider how they might be utilised in a hierarchical
or multiple unit relationship to account for the data.
My first PCT model might start at the highest level with a reference value for a static black landmark at the centre of vision which is compared to the perceived location of the landmark at the moment.
The error (left versus right) in this system sets the desired direction of visual angular velocity which is compared to perceived visual angular velocity.
<
/span>
The (left versus right) error in this system sets the desired angular acceleration which is compared to the perceived angular acceleration.
The (left versus right) error this system sets either perceived wing position or perceived yaw torque. This error drives the motor signal itself.
The torque spikes would be driven by periodically setting reference values for large visual angular velocity, rather than by directly stimulating behaviour. This would bo
th ensure that the torque spikes truly explore the environment even if there is wing injury or air disturbance. It would also obviate the need for an efference copy and would also account for the lack of response to angular movement in this direction when it is superimposed in the simulator.
The model is still likely to be incomplete though. Do you have any data on whether the following are perceived by the fly?
-
direction of desired chemicals (e.g. Food smell; pheromones) through an olfactory sense? This might actually be right at the top of the hierarchy as it is likely to be more distal in terms of where it eminates than the other variables and it is more likely to be the intrinsic driver for survival and reproduction.
-
air direction on the body through body hair stimulation?
-
wing position?
Most importantly it is critical that only the visual sense has been held stationary by tethering the fly. The fly will surely still perceive changes in the other senses as it applies torque olfactory, air movement and auditory? So while I don’t think it is a big issue if there does turn out to be spontaneous activity, I really don’t think this can be confirmed in the studies I have seen because the fly could still be attempting to control these other perceptual variables by applying torque and thrust.
Finally, and importantly, when you remove the perceptual input from a negative feedback control system, you don’t get a lack of output, you get output that fails to control effectively, and that varies with internally directed changes in reference values (because these are subtracted from zero perceptual signal) to get an output. This is what happens to deafferented patients. They don’t stop moving. They just move in a way that does not control effectively, which most probably looks like spontaneous activity.
Warren
···
On Thu, Jul 7, 2016 at 10:30 PM, Warren Mansell wmansell@gmail.com wrote:
I don’t find this easy to follow, but it appears to me that the negative feedback loop design has been dismissed because (a) it is not known that integration occurs in t
he output signal, (b) no consideration of a hierarchical arrangement has been made and (c) the authors are also unaware of reorganisation within a control unit. So they have had to resort to an efference copy approach. Without really dissecting the evidence though I couldn’t say for sure that a PCT model could do it!
PS how was my answer to the speed curvature power law?
Warren
On 7 Jul 2016, at 17:47, Alex Gomez-Marin agomezmarin@gmail.com wrote:
PS Alex, what did you think of my reply to this?
Warren
[From Rick Marken (2016.07.09.2045)]
···
On Thu, Jul 7, 2016 at 6:40 PM, Warren Mansell wmansell@gmail.com wrote:
WM: Hi Alex and CSGers, I have read this ‘classic’ paper now and I hope you will engage me in a discussion. It may be classic and show a lot of hard work empirically but in terms of model building it seems very poor to me. What do you guys think?
RM: I agree. But I also think there really isn’t much to model since the fly’s don’t seem to be allowed to control their orientation relative to the moving background inasmuch as they are tethered. You can’t really study control if you prevent it from happening.
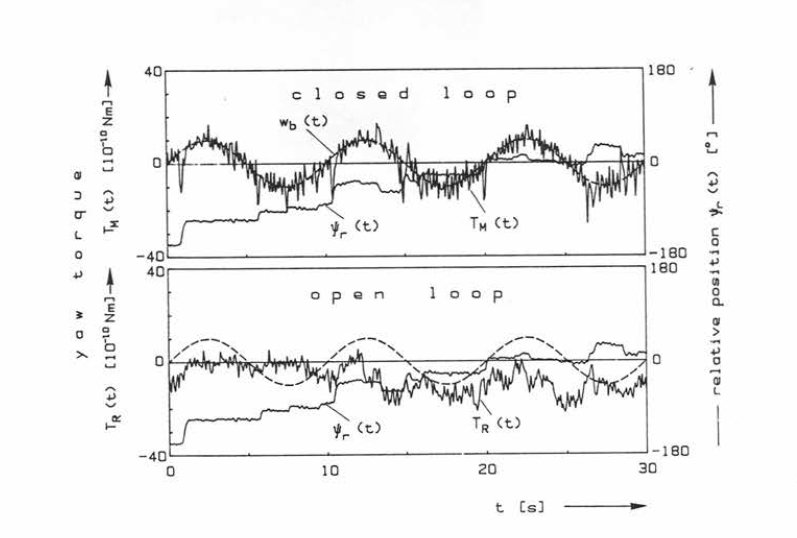
RM: When there is control the only kind of model that can account for it is a closed-loop negative feedback model. But the goal of the authors of this paper seems to be to show that a “simple” closed loop model can’t explain control. The main results that they use to show this is a comparison of open and closed-loop behavior described in section 3.2.2.4. The test they use is uncannily similar to one I used way back in 1981 (described on pp. 67-78 of “Mind Readings”).
RM: What the present researchers did (and what I did) was have the controller control in closed loop mode and then surreptitiously replay the variations in the controlled input that had occurred during the closed loop phase but with the output actually having no effect at all on that input – the situation is truly open loop with respect to the variable to be controlled. The present researchers saw very different behavior in the closed and open loop situation, as per the diagram below:
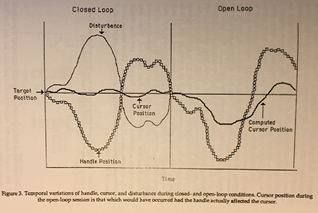
RM: It looks to me that control in the closed loop case is much better than in the open loop case, even though the inputs “guiding” output were exactly the same in both cases. I found the same thing, as shown in the graph below:
RM: Note that in closed loop tracking the person’s output precisely mirrors the disturbance, keeping the cursor very close to the target; but when the exact same cursor movement is repeated (so that the persons output now has no influence at all on the cursor) the outputs only somewhat mirror the disturbance. The graph for the cursor in the open loop case shows how the cursor would have varied if the outputs in the open loop case had actually affected the cursor; control would have been very poor.
RM: I used this demo to show that input could not be considered the “cause” of output in a closed loop task; it’s both a cause and and result of output at the same time. So I was using this comparison of open and closed loop behavior to show that a simple closed loop model is the correct model of control behavior. The authors of the subject paper somehow used the comparison of behavior in the open and closed loop case to argue against a “simple” closed loop model; I can’t really follow their logic. But I’m more convinced by my research than theirs, even though theirs is quite elegant. At least they did research.
RM: Oh, and I don’t think their closed loop case was really closed loop since the flies were tethered. I think that in that case they projected what the fly would have seen based on it’s torque forces.
Best regards
Rick
The experiments are hugely impressive and I had no idea there was such a body of research out there. There certainly seems enough data to build some kind of model! I have three sets of comments. First about the characterisation of the ‘old’ feedback model which I hope to distinguish thoroughly from PCT. Second about the alternative model. Third, how we might start to produce a PCT model.
So, the 11a figure is actually a fairly accurate representation of an individual control unit in PCT with the reference signal internal which is funny as PCT is not mentioned. However, it is only one unit. Given the various potential perceptual variables discussed in the article, one would expect these to be controlled too, but of course one unit on its own cannot show this. Related to this point, the most likely configuration of multiple units is a hierarchy, and this is not shown as an option. The diagram also does not reveal that the motor signal in PCT is always passed through a leaky integrator and a gain applied. Finally the diagram does not show how reorganisation can modify the change in parameters of control units on a random basis when error persists.
Turning to the proposed model, I like the fact that it is more complex! It includes the torque spikes which seems sensible. However there are several issues. First, locating the world inside the fly seems odd but let’s let that pass. Second, this diagram still does not include all the perceptual variables hypothesised in the article. So it seems incomplete. I can’t see how it could be run mathematically to compare to observed behaviour. It is also hard to see where any negative feedback control is occurring even though this is acknowledged in the article.
My initial steps to make a PCT model would be to identify all the potential perceptual variables (see below) and the potential motor outputs (yaw torque and thrust) and then consider how they might be utilised in a hierarchical
or multiple unit relationship to account for the data.
My first PCT model might start at the highest level with a reference value for a static black landmark at the centre of vision which is compared to the perceived location of the landmark at the moment.
The error (left versus right) in this system sets the desired direction of visual angular velocity which is compared to perceived visual angular velocity.
<
/span>
The (left versus right) error in this system sets the desired angular acceleration which is compared to the perceived angular acceleration.
The (left versus right) error this system sets either perceived wing position or perceived yaw torque. This error drives the motor signal itself.
The torque spikes would be driven by periodically setting reference values for large visual angular velocity, rather than by directly stimulating behaviour. This would bo
th ensure that the torque spikes truly explore the environment even if there is wing injury or air disturbance. It would also obviate the need for an efference copy and would also account for the lack of response to angular movement in this direction when it is superimposed in the simulator.
The model is still likely to be incomplete though. Do you have any data on whether the following are perceived by the fly?
- direction of desired chemicals (e.g. Food smell; pheromones) through an olfactory sense? This might actually be right at the top of the hierarchy as it is likely to be more distal in terms of where it eminates than the other variables and it is more likely to be the intrinsic driver for survival and reproduction.
- air direction on the body through body hair stimulation?
- wing position?
Most importantly it is critical that only the visual sense has been held stationary by tethering the fly. The fly will surely still perceive changes in the other senses as it applies torque olfactory, air movement and auditory? So while I don’t think it is a big issue if there does turn out to be spontaneous activity, I really don’t think this can be confirmed in the studies I have seen because the fly could still be attempting to control these other perceptual variables by applying torque and thrust.
Finally, and importantly, when you remove the perceptual input from a negative feedback control system, you don’t get a lack of output, you get output that fails to control effectively, and that varies with internally directed changes in reference values (because these are subtracted from zero perceptual signal) to get an output. This is what happens to deafferented patients. They don’t stop moving. They just move in a way that does not control effectively, which most probably looks like spontaneous activity.
Warren
On 7 Jul 20
16, at 17:47, Alex Gomez-Marin agomezmarin@gmail.com wrote:
On 7 Jul 2016, at 22:38, Alex Gomez-Marin agomezmarin@gmail.com wrote:
Again, dear PCTers, rather than trying to fill in the checkbox for PCT items, one may appreciate the virtues of that work, not only in terms of what is claimed but also in terms of what is done. I had a long conversation on Skype with Brembs the other day. We need many more works like this, and people like that. We are all trying to understand the phenomenon of behavior.
–
Richard S. Marken
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers
On Thu, Jul 7, 2016 at 10:30 PM, Warren Mansell wmansell@gmail.com wrote:
I don’t find this easy to follow, but it appears to me that the negative feedback loop design has been dismissed because (a) it is not known that integration occurs in t
he output signal, (b) no consideration of a hierarchical arrangement has been made and (c) the authors are also unaware of reorganisation within a control unit. So they have had to resort to an efference copy approach. Without really dissecting the evidence though I couldn’t say for sure that a PCT model could do it!
PS how was my answer to the speed curvature power law?
Warren
On 7 Jul 2016, at 17:47, Alex Gomez-Marin agomezmarin@gmail.com wrote: