···
On Sun, Dec 22, 2013 at 2:53 AM, Boris Hartman boris.hartman@masicom.net wrote:
HB:
TO PUT IT EXACTLY IN PCT SENSE, CONTROL IS : “Achievement
and maintanance of a preselected perceptual state in the controlling system,
through actions on the environment that also cancel the effects of
disturbances” (B:CP, 2005).
RM:
Yes, that’s a good one too;-) It’s tough to give a definition of
control that is completely theory free and I don’t think Bill was trying to do
that when he came up with this definition. Indeed, part of Bill’s goal in
giving this definition of control was to include the important new assumptions of
what has come to be called PCT. I don’t think it was until many years after the
publication of B:CP that he actively promoted the idea that control was a
phenomenon in and of itsef – an objective fact (as in the subtitle to LCS
III) – that is explained by the theory of control: control theory.
HB :
I’m wondering if you become an “officiall interpreter” of
Bill’s knowledge ? J. I thought you are just moderating. And from one
subtitle you concluded that “control” is “objective” fact.
The “fact” in subtitle could also mean that there are so many
evidence and models that we can conclude the generality of control in living
beings. If you think that Bill showed for “objectivity” in external
environment, you’ll with no doubt find some evidence in the book LCS III and
show me that you are right.
It seems to me, that you are trying to reduce PCT to some special case
of PCT. But in this way PCT will fall apart like “castle from cards”.
Beleive me. Bill was smart guy, knowing what he was doing, and why he wrote
definitions as they are. He kept generality of PCT model. And you are not.
Control units can be used in many ways, not just for “protecting” the
“controlled” variable from disturbances. Think of it.
Control “being a fact” is by my oppinion also contradiciting
your previous statement that “control” is phenomenon, so it’s by my
research in vocabulary, entirely dependent from perception. And perception can
never be “objective”. Maybe you had in mind some other meaning of
“phenomenon”.
There is no “objective fact” on itself, because you have to
prove that you somehow directly access to “reality” (outer
environment) and know it in every detail. But still humans are knowing about
“reality” only through their perception (some transformations) of
“reality”. And perception is not only limited, but it’s also just
partly presenting the “reality” or outside environment (as much input
functions you have) and input gain. Mostly enough for good control, but
sometimes is not enough. Accidents happens.
And more perceptions of the same “reality” more “objective
fact”. “Reality” is never mirrored into your consciousnes to be
“objective”. Whatever you are perceiving is just a “model”,
“perceptual construction”, “abstract system”, whatever you
call that what you perceive.
RM :
I think the definition above can be “objectified:” a bit by changing
“perceptual state in a controlling system” to “variable”.
The idea that it is a perceptual variable that is controlled is really part of
the theory – a very important part of the theory but part of the theory
nevertheless.
HB :
“Objectifying” Bill’s definition with “variable” is
not good idea. As I said before. I’m pretty sure that Bill knew what he was
doing. But I’m not sure that you do. I think that’s why his definitions and generic
diagram survived so much time, and I beleive it will survive much more time in
future, if you will not change or modify it. Putting the controlled “variable”
into Bill’s definition and consequently into “functional” diagram
could by my oppinion destroy it’s generality. It could be meant as just one
special case of PCT.
RM :
But one can observe control without making any assumptions about how control
works. We can do this by observing a variable, such as the distance between
cursor and target in a tracking task, and noting that disturbances have little
or none of their expected effect on this variable and that this is because the
effects of these disturbances are being cancelled by observed actions (mouse
movements).
HB :
I thought that you are “protecting” the “controlled”
variable form distrubances not canceling the effects of disturbances.
Why did you use term cancel instead of term “protecting”, if
they have the same meaning by your oppinion ? And sorry I didn’t get it, which
is “controlled” variable in this case that you are “protecting”
it from disturbances ?
RM :
So control is happening because we are seeing the:
“Achievement and maintenance of a variable in a particular state
through actions on the environment that also cancel the effects of disturbances”.
HB :
So you are also “officialy” promoted to change Bill’s definitions.
To me it’s obviously that you shouldn’t do that. Now as you changed definition,
you’ll have to change also his generic diagram and put the “controlled
variable” into outer environment. Well I’m wondering, are you going to
change whole his theory? Into what, RCT ?
RM :
I also got rid of the term “pre-selected” because
this also makes theoretical assumptions about what is going on inside the
system doing the controlling.
HB :
You got rid of Bill’s term in his definition (???). I’m really
wondering who authorised you to do that ?
RM :
Of course the “variable” referred to in the above
definition is a perception but then everything is a perception so it’s really
unnecessary to mention it.
HB :
Better. Nothing is “objective”. All is just perception. Variables
are just perceptual characteristics. But in your case I see it necesary to
mention it, as you are mixing “objective facts” with perceived states
of variables.
And I’m asking you once again that you use sysmbols HB not BH. As I
will thought that you are reffering to Bob Hintz.
BH: So as I see it, control is initially not “protecting” act
but cancelling act of output which
compensate effects of disturbances so to maintain perceptual stability (some
preselected perceptual state) in the controlling system.
RM: That’s fine. The
verbal description matters less to me than the functional model that actually
makes control work.
HB :
Well, I’m glad that you are satisfied with my verbal descriptions. But
I still think that verbal description are mostly closely related to “functional
models” in our heads. And I’m pretty interested if you can show me your
"functional« model (not adapted Bill’s), that will show how control
unit is “protecting” controlled variable in outer environment. I’d
just like to see how much your verbal description is not important to you and
how “actualy makes control work”.
RM :
I think that control can be correctly described as involving
“cancelling” the effect of disturbances or “protecting” a
controlled variable from the effects of disturbance. But if
“protecting” doesn’t work for you then feel free not to use it.
HB:
This one is very »foggy« and »slippy«
conclusion. I think that you shouldn’t use this “equatation”,
specially not in Bill’s defintions. But I think you could use it in some of your
theories.
But to test rightness of your “equality”, I’d be glad if you
show us how examples about PCT that Bill used with his favourite terms work. So
please show us how you would verbalize his examples with term “protection”.
Maybe something like this :
-
driving
control (“protection” of speed and position on the road),
-
tracking
experiment (“protection” of position of cursor)….
-
maybe
you’ll remember some more.
As always maybe I misunderstood something…sorry…
Best
Boris
From: Control Systems Group
Network (CSGnet) [mailto:CSGNET@LISTSERV.ILLINOIS.EDU] On Behalf Of Richard Marken
Sent: Sunday, December 22, 2013
8:12 PM
To: CSGNET@LISTSERV.ILLINOIS.EDU
Subject: Re: Classical Control
Systems Lectures
[From Rick Marken (2013.12.22.1110)]
On Sun, Dec 22, 2013 at 2:53 AM, Boris Hartman boris.hartman@masicom.net wrote:
BH: TO PUT IT
EXACTLY IN PCT SENSE, CONTROL IS : “Achievement and maintanance of a
preselected perceptual state in the controlling system, through actions on the
environment that also cancel the effects of disturbances” (B:CP, 2005).
RM: Yes, that’s a good
one too;-) It’s tough to give a definition of control that is completely theory
free and I don’t think Bill was trying to do that when he came up with this
definition. Indeed, part of Bill’s goal in giving this definition of control
was to include the important new assumptions of what has come to be called PCT.
I don’t think it was until many years after the publication of B:CP that he
actively promoted the idea that control was a phenomenon in and of itsef – an
objective fact (as in the subtitle to LCS III) – that is explained by the
theory of control: control theory.
I think the definition above can be “objectified:” a bit by changing
“perceptual state in a controlling system” to “variable”.
The idea that it is a perceptual variable that is controlled is really part of
the theory – a very important part of the theory but part of the theory
nevertheless.
But one can observe control without making any assumptions about how control
works. We can do this by observing a variable, such as the distance between
cursor and target in a tracking task, and noting that disturbances have little
or none of their expected effect on this variable and that this is because the
effects of these disturbances are being cancelled by observed actions (mouse
movements). So control is happening because we are seeing the:
“Achievement and maintenance of a variable in a particular state
through actions on the environment that also cancel the effects of
disturbances”.
I also got rid of the term “pre-selected” because
this also makes theoretical assumptions about what is going on inside the
system doing the controlling. Of course the “variable” referred to in
the above definition is a perception but then everything is a perception so
it’s really unnecessary to mention it.
BH: So as I see it, control is initially not “protecting” act
but cancelling act of output which
compensate effects of disturbances so to maintain perceptual stability (some
preselected perceptual state) in the controlling system.
RM: That’s fine. The
verbal description matters less to me than the functional model that actually
makes control work. I think that control can be correctly described as
involving “cancelling” the effect of disturbances or
“protecting” a controlled variable from the effects of disturbance.
But if “protecting” doesn’t work for you then feel free not to use
it.
Best
Rick
This could mean that “controlled variable” is already
affected and new state perceived and controlled in comparator and act of
canceling the effect or compensating the efect of disturbances realized.
To use term “protect”
is something that means for me to act in advance, so to “prevent”
some “controlled variable” or better predefined state of controlling
system, from being disturbed, displaced, affected…etc.
Term
“protecting” is probably kind of control but not in initial sense. By
my oppinion is one of consequences of “pure” PCT control, which is by
definition used with terms canceling, compensating, etc…
Something similar
was Ashby’s “control” definition : “Every stable system has the
property that if displaced from a state of equilibrium and released, the
subsequent movement is so matched to the initial displacement that the system
is brought back to the state of equilibrium” (Ashby, 1960).
I think that Ashby
used “compensation” for description of “control”. And it
seems to me that he used terms to describe actual “displacement” and
actual “compensation” not something happening in advance.
He tried to give
also definitions of dynamic system, variable and system, specifications of
behaviour, “stability”, “equilibrium”,
“steady-state”, and so on, as I think that Bill used some of this
terms in Appendix to the book B:CP, 2005.
So the main point
I see, is that whatever “controlled variable” is meant, is first
“moved” (perceived displacement) from the predefined, initial state
(reference state, equilibirum…) and than by canceling or compensating or
opposing effects of action or whatever we call that (maybe behavior), again
brought back to predefined, initial state (reference, equilibrium, whatever…).
If we say that
“controlled variable” is protected than you probably assume that
“controlled variable” was not disturbed yet, as disturbances has
already been cancelled, compensated by control system in advance. But that can
never happen if control system “has no experiences” with “moving
controlled variable” from initial state with certain disturbances. How
else could control system “choose” disturbances to act on, so to
protect “controlled variable” from being affected if control system
doesn’t know what kind of effect distrubances have on “controlled
variable” and system itself.
I think that the
selection of disturbances that could have effect on controlled variable, are
those which in the past show tendency to “displace controlled
variable” from initial state. So when control system has that
“experience” than it can probably reorganize so to
“protect” it from disturbances. But by my oppinion it has to be
complex control system, build up with many control units, what could happen
through evolution.
In such a complex
organized control systems (more organized control units), certain control units
serve the goal to really “prevent” or “protect” certain
“controlled variable” from being disturbed, displaced or
“moved” from initial state like in some physiological cases.
So I think it’s
better to use initial terms when making defintion about control in PCT sense
such as cancelling, compensating activity not “protecting” activity.
Your
“exclusive” statement about Gordon…. :
RM : “Well,
Mr. Douglas is now off my list of people to
listen to about control theory. This lecture was awful”.
…has no
sense to me.
By my oppinion
Douglas tried methodically to show how control in different dynamic system
works. And by my opinion his retorics and pictures about control is better then
yours about “protecting controlled variables”. But both are
insufficient (as probably mine is), but that doesn’t mean that we have to stop
talking about your and his presentation of control, because they are
“awfull”. I think that both are good as the bases to improve them, so
they would show better how control theory works.
Rick, you are
doing a good job, moderating on CSGnet. But nobody said that you couldn’t be
better J
I can’t comment
other discussions for the time being as I didn’t read them. Maybe I missed
something important. I also didn’t entirely follow the discussion about B:CP
(2005) so I’m interested if you make any comments about Appendix in the book.
There are some interesting clarifications of terms control, stability…
Best,
Boris
From: Control Systems Group
Network (CSGnet) [mailto:CSGNET@LISTSERV.ILLINOIS.EDU]
On Behalf Of Richard Marken
Sent: Saturday, December 21, 2013
2:38 AM
To: CSGNET@LISTSERV.ILLINOIS.EDU
Subject: Re: Classical Control
Systems Lectures
[From Rick Marken (2013.12.20.1740)]
Martin Taylor
(2013.12.20.11.47)–
RM: Stability and
control are two different phenomena, something that it is now clear to me
that Mr. Douglas is completely unaware of. These two different phenomena are
produced by two different kinds of systems; stability is a kind of behavior
exhibited by certain “open-loop” or what I call “causal”
systems.
I still haven’t
looked at the videos, but it strikes me that you are doing the old
philosophers’ trick of taking a word that has a variety of meanings, and using
a meaning appropriate in one context as though that were the meaning
appropriate to a different context. Yes, “stability” and
“control” are indeed different phenomena, in the same way
“food” and “vegetable” are different concepts.
RM:
No,“stability” and “control”, as described by Douglas in
the very first control lecture, are different phenomena in the way
“food” and “poison” are different. A stable system
(according to the lecture) is one that returns to its original
(“equilibrium”) state after a transient disturbance; a control system
is is one that remains in a reference state during continuous disturbance.
Douglas should have talked about variables rather than systems but you get the
idea.
MT: All feedback
loops, in fact all dynamical systems, whether control systems or not, have
stability criteria. Either they are stable or not. Some are more stable than
others.
RM: Yes, they do.
Indeed, I measure control in terms of stability (observed/expected variance of
the variable). In this case “stability” is simply referring to a
measure of the observed variations in a variable and it can be used to measure
the variability of a controlled variable or an uncontrolled variable (like the
variable position of the ball in the bowl that Douglas refers to as a stable
system).
MT: Some are
metastable, meaning they will maintain their current values until something
momentarily disturbs one of their signal values. Some of those will continue to
diverge from the original metastable value after the disturbance, some will
just maintain the disturbed set of signal values without further change. Some
are absolutely stable, meaning that after any kind of momentary disturbance
they will return their values to their original levels. Most real systems don’t
do that, and are stable only if the momentary disturbance doesn’t exceed some
limit.
The key concept is the “orbit”. All systems that can be described by
a vector of variables have a state. Their state is the vector of current
variable values together with the rates of change of the current variables.
That includes control systems, ball-in-a-bowl systems, the synapse strengths of
networks of millions of neurons, etc. etc. If the system is at some location in
the state space and is not further disturbed from outside, it will follow some
track through the state space. That track is an orbit, and there is only one
orbit through any point in the state space.
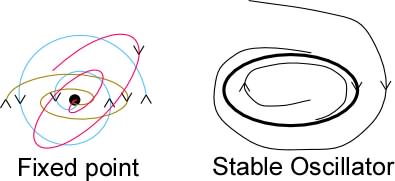
A stable system is one for which the orbit will converge to some track that is
the same for all the initial locations in the state space. That track is called
an “attractor”. The attractor may be a fixed point, a closed path
(which represents a stable oscillator) or a “strange attractor”
(which I won’t explain now). An unstable system is one for which the
orbits diverge. Here are a couple of examples of attractors, or at least the
projections of them into two dimensions, because even in 2-D, the orbit is
actually in a space of four dimensions, two for location and two for velocity.
I have omitted the velocity coordinates in these examples, and in the
fixed-point example it is the velocity that distinguishes the orbits where two
of them cross in the figure. In the 4-D state space, only one orbit passes
through any particular point.
![]()
RM: All of this
simply describes the observed behavior of a variable. Nothing about the shape
of these orbits can tell you whether the variable is controlled or not.
MT: A control
system is one for which the attractor converges in at least one dimension (the
perception-value dimension), but that’s not the main criterion for
differentiating the “ball-in-the-bowl” from a trivial control loop.
RM: That’s not
only is not a “main” criterion; it’s not a criterion at all. The only
criterion for distinguishing the “ball-in-the-bowl” from a controlled
ball in the bowl is the criterion John Kirkland just mentioned: The criterion of The
Test for the Controlled Variable, which is whether there is less of an effect
of a disturbance on the controlled variable than expected. You simply cannot
tell, by looking at just the observed behavior of the
“ball-in-the-bowl” (like the “fixed point” and “stable
oscillator” orbits pictured above) whether you are observing the behavior
of a controlled or uncontrolled variable. The orbits plotted above could be the
behavior of a controlled or uncontrolled ball. This is exactly analogous to the
situation in my mindreading
demo (http://www.mindreadings.com/ControlDemo/Mindread.html). When you move one avatar around the
screen in a controlled manner, the other two move as well; you can’t tell from
the movements (orbits) of the avatars, which is controlled and which are not.
In order to determine control you have to disturb the position of the avatars
and see which avatar is affected least by the disturbance.
MT: Bruce Abbott put his finger
on it when he pointed out that the ball-in-the-bowl uses the energy supplied by
the disturbance to return the ball to its fixed point, whereas the control loop
uses an independent energy supply to oppose the effect of the disturbance on
one (and only one) of the variables in the state space of the loop. The manner
in which control is established is irrelevant.
RM: This is a
description of models that produce the observed behaviors: the open loop
physics model for the “ball-in-the-bowl”; closed-loop control for the
controlled ball. The manner in which control is established may be
irrelevant (I have no idea what that means actually; the only way I know of to
establish that control is happening is by using the Test) but one has to have
established that control is going on in one case and that it’s not going on in
the other in order to apply the correct explanations (models) to each case.
MT: It so happens
that the PCT definition of control is the maintenance of one particular value
among the many different signal values in a negative feedback loop, so Rick’s
comment “Control is produced only by negative feedback control
systems” is a tautology.
RM:
Actually, that’s not the PCT definition of control. The definition of control
is “maintenance of a variable in a pre-selected state, protected from
disturbance”. A negative feedback loop is a model of how control works. It’s
not a tautology.
MT: Control is
produced only by negative feedback control systems. So I couldn’t disagree
with you more when you say “we need to be sure that stability and control
are not seen as belonging to different kinds of systems”. In fact, we need
to be VERY sure that we understand that stability and control
“belong” to two very different systems: open-loop, causal
systems for the former and closed loop negative feedback systems for the
latter. [MT: “you” here is Bruce Abbott.]
RM: So let me get
this straight. Are you saying that the “stability” of the
behavior of the “ball-in-the-bowl” is the same as the
“stability” of the behavior of, say, the water level in Ktesibios’
water clock?
Best
Rick
To which I can
only say that there are several applicable proverbs along the lines that one is
better advised to listen and learn rather than to guess and pontificate. Bruce
is quite right to say “we need to be sure that stability and control are
not seen as belonging to different kinds of systems”. To contradict Bruce
is to say something as nonsensical as “we need to be sure that leafiness
and trees are not seen as belonging to different kinds of objects”.
“Stability” applies to all kinds of dynamical systems, which control
systems are.
Martin
–
Richard S. Marken PhD
www.mindreadings.com
The only thing
that will redeem mankind is cooperation.
-- Bertrand Russell
No virus found in this message.
Checked by AVG - www.avg.com
Version: 2014.0.4259 / Virus Database: 3658/6937 - Release Date:
12/20/13
No virus found in this message.
Checked by AVG - www.avg.com
Version: 2014.0.4259 / Virus Database: 3658/6937 - Release Date:
12/20/13
–
Richard S. Marken
PhD
www.mindreadings.com
The only thing that will redeem mankind is cooperation.
-- Bertrand Russell
No virus found in this message.
Checked by AVG - www.avg.com
Version: 2014.0.4259 / Virus Database: 3658/6941 - Release Date: 12/22/13