···
From: Bruce Nevin bnhpct@gmail.com
Sent: Saturday, November 17, 2018 3:40 PM
To: boris.hartman@masicom.net
Cc: csgnet@lists.illinois.edu
Subject: Re: Collective Control:
[Bruce Nevin 2018-11-17_13:43:45 UTC]
Boris Hartman [no ID tag] Nov 17, 2018, 4:18 AM –
BN : Thank you, Boris, for this collation of excerpts from Kent’s writings about collective control. It’s useful and helps to clarify the terms of the conversation. I’m grateful for it. You have excerpted from his 1994 “Perceptual control and social power” (Sociological Perspectives 37:461-496).
HB : Not exactly. I saw this 1994 article which you are mentioning and I have it. But the basis for “collation of excerpts” is directly from his internet page that was available at that time.Â
BN : Twelve years more recent is his 2006 “Understanding collective control processes” (in McClelland & Fararo, eds., Purpose, Meaning and Action: Control systems theories in sociology). I can send you a copy if you don’t have it.
HB : Thank you for your concern. But I don’t understand how can you send copy of authorized book ? You mean I have to pay for it ?
BN : And of course we are all waiting for the publication of LCS IV, in which he and Martin both have chapters dealing with collective control.
HB : Yes it’s been quite some years arround since first talkings about LCS IV appeared. Well nothing happened. I have some doubts about this book because I don’t see some special understanding of LCS III book which probably LCS IV should upgrade. And diagram on p. 191 (B:CP) is not finnished yet. Well let us see what publication is about ?
BN : A comment about one excerpt:
KM : Each perception that the individual is controlling at a given moment, that is, anything in the individual’s current perceptual world that would prove disturbing if arbitrarily changed or anything the individual is currently using to perform an action, would be the target of a feedback loop
BN : I understand “target of a feedback loop” to mean “controlled variable” (more precisely, a perception of it is the controlled variable),
HB : I hope that you don’t mean “perception of controlled variable” ?
I hardly understand why you choosed example from Kents’ work that could have at least “double meaning” ? The “target of contol loop” can be interpreted in so many ways that I understand why it suits you. it hasn’t precise meaning and thus enable phylosophy. Why didn’t you choose more precise “excerpt” ???
BN : ….and the things thatt “the individual is currently using to perform an action” for a current control process are things in the environmental feedback path by which the action effects control.
HB : Sorry I don’t understand ? I’ll event not try to understand you phylosophical “excursions”.
BN : When the individual perceives something as instrumental to their control, that’s a controlled perception:
HB : Do you mean that “perceptual signal” is “controlled perception” ? It isn’t. “Control” is not entering organism. But anyway it seems that you want to talk about certain example of control. Which is it ? We need general model of how organisms function.
BN : ….anything that reduuces its usefulness is not only a disturbance to control in the main control loop, it is also a disturbance to the perception of the instrumentality of that element of the feedback path.
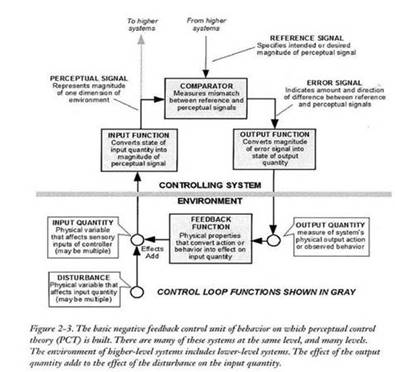
HB : I don’t understand what you want to say ? There are more disturbances to more processes in control loop ??? What are you talking about ? Here is diagram LCS III and definitions. Explain what you want to explain through diagram and definitions of control loop ?
![cid:image001.jpg@01D37ABE.36063DF0]()
PCT Definitions of control loop :
Bill P (B:CP):
- CONTROL : Achievement and maintenance of a preselected state in the controlling system, through actions on the environment that also cancel the effects of disturbances.
Bill P (B:CP):
- OUTPUT FUNCTION : The portion of a system that converts the magnitude or state of a signal inside the system into a corresponding set of effects on the immediate environment of the system
Bill P (LCS III):…¦the output function shown in it’s own box represents the means this system has for causing changes in it’s environment.
Bill P (LCS III):
- FEED-BACK FUNCTION : The box represents the set of physical laws, properties, arrangements, linkages, by which the action of this system feeds-back to affect its own input, the controlled variable. That’s what feed-back means : it’s an effect of a system’s output on it’s own input.
Bill P (B:CP) :
- INPUT FUNCTION : The portion of a system that receives signals or stimuli from outside the system, and generates a perceptual signal that is some function of the received signals or stimuli.
Bill P (B:CP) :
- COMPARATOR : The portion of control system that computes the magnitude and direction of mismatch between perceptual and reference signal.
Bill P (B:CP)
- ERROR : The discrepancy between a perceptual signal and a reference signal, which drives a control system’s output function. The discrepancy between a controlled quantity and it’s present reference level, which causes observable behavior.
Bill P (B:CP) :
- ERROR SIGNAL : A signal indicating the magnitude and direction of error.
HB : So whatever you have to say use diagram and definitions.
BN : This is the locus of collective control. Further, if such an instrumentality in the feedback path is not perceived as such, when an influence on it affects control through the main loop, problem-solving control activities result in it becoming a perceived variable subject to control (and collective control).
HB : Bruce you know that I don’t like phylosophy. And you choosed something from Kents work that is uncertain and I’m beggining to understand what you are trying to achieve. You want to continue phylosophical discussion about “PCT control loop”. You know my standards and arguments. So I expect from you PCT and physiological and biological and so on evidences for what you are talking about. Do we understand  each other ? If you will continue with phylosophy this conversation is finnished.
BN : Thank you, too, Boris, for staying clear of forms of discussion that have made it difficult to see how to respond in any useful way to other posts of yours.
HB : My discussion is difficult for anybody that don’t use clear definitions and scientific arguments but present some subjective views and imagination.
BN : By this, I mean ad hominem attacks and an assumption of personal authority to correct, lecture, and ‘warn’ others
HB : Well this is the “real target” of your post. You want to lecture me how to talk on CSGnet ??? Buzz of Bruce Nevin… This is the last tine that you are lecturing to me how to talk. I told you once that you should sweep in fromt of your door. You start insulting me. And somebody who is insulting others should teach others how to behave ??? Where are you from ? Mars ?
I’ll continue correcting, lecturing and warning anybody that is misleading CSGnet forum with some imagined constructs without any scientific support like Ricks “protected from disturbances” is. Such insinuations shouldn’t be part of discussions here and the same goes for your “constructs” with “new diagrams” and “model of interaction” which you performed some time ago.
BN : ….about perceived transggressions of what might be called terminological puritanism.
HB : I’ll take this as new insult in the row of insults I was exposed on CSGnet.
BN : I appreciate that you have stuck to the subject and helped to advance our understanding of it.
HB : Well I don’t understand this either. First you are thanking me than you insult me and after that again thanking… Conversation is over…
Boris
/Bruce Nevin
On Sat, Nov 17, 2018 at 4:18 AM “Boris Hartman” csgnet@lists.illinois.edu wrote:
Rick
From: Richard Marken (rsmarken@gmail.com via csgnet Mailing List) csgnet@lists.illinois.edu
Sent: Wednesday, November 14, 2018 4:17 AM
To: csgnet csgnet@lists.illinois.edu
Subject: Re: Collective Control:
[Rick Marken 2018-11-13_19:15:51]
[Martin Taylor 2018.11.13.17.32]
RM:…What I want is an example of collective control of the type demonstrated in Kent’s simulations, where two or more separate controllers control the same variable relative to different references, keeping it n a virtual reference state, protected from disturbance.
MT: …And for a real-world example of that, I think you could use a pretty good proportion of unresolved political conflicts
RM: Please be more specific. Say who the different controllers are and what the variable is that is being maintained in a virtual reference state. But these conflicts don’t seem to be good examples of social stability; they are always on the cusp of violence.
MT: (I exclude ones like the Israeli-Palestinian conflict over who has the right to live in a certain land area, where one side has overwhelming force.
RM: I agree that Kent’s model doesn’t work for that one for the reason you give: the land is not being kept in a virtual reference state (which I suppose would be a state where all the land was equally occupied by both Israeli and Palestinian forces) but, rather, in the reference state desired by the Israelis – completely occupied (under the control of) Israel.
MT: By the way, I don’t think there is a good rationale for saying that conflict between independent controllers in a single body is in principle any different between a conflict between control units in separate bodies.
RM: The conflicts are not different “in principle”, the principle being that both conflicts are a result of two (or more) systems having different references for the same (or a similar) perceptual variable. But I think there is a good rational for saying that there is an important difference between conflict (or cooperation) in these two cases. When the systems are in the same body, the references creating the conflict (or cooperation) are presumably determined by other systems within that body;
HB : So it’s general principle of how organisms function.
RM : …but when the systems are in different bodies, the references creating the conflict (or cooperation) are in two separate bodies. I think this makes the “separate bodies” case quite different than the “same body” case.
HB : I agree, that they seems to be different, but stil is “collective control”, because individual LCS (with their nervous system) are doing control in shared environment. So definition of “social collective control” is about how separate organisms control in common environment and how influences all involved. It’s about “intersection of control loops”. Intersection of control loops means in Kents definition, intersection of “effects of output on input”. It’s PCT definition. That’s what “gossamer thread” is about. Effects of control in organisms are done through external environment and “collective effects” of individual control can be considered as “collective control”.
Kent M :
…according to the mathematics of the control-system equations that Powers presents (1973a: 84-85), the variable actually stabilized in a control loop is the perceptual signal, which, when the control system is operating normally, is kept nearly equal to the reference signal.
Powers emphasizes that human organisms can only control their perceptions.
To understand the sociological implications of this model of human agency as control of perceptions, we need to take a fresh look the relationship between human actors and their environments.
HB : I understand It says how individual perception is controlled and that sociaological implication means that you have to turn two PCT diagrams (for ex. LCS III) against each other (human agency as control of perception).
![cid:image001.jpg@01D37ABE.36063DF0]()
KM : Suppose feedback loops were visible, like gossamer threads stretching from an individual’s body through objects in the environment and back to the individual’s sense organs.
HB : Kent is clear that he is using PCT. As I understand what Kent is talking about I see that basic understanding of “gossamer threads” is part of “Control of perception” (see diagram) in the form of simple “feedback function”.
Bill P (B:CP) :
FEED-BACK FUNCTION : The box represents the set of physical laws, properties, arrangements, linkages, by which the action of this system feeds-back to affect its own input, the controlled variable. That’s what feed-back means : it’s an effect of a system’s output on it’s own input.
HB : It’s clear at least to me that Kent is using “actions” and “individual sense organs” to describe how “gossamer thread” works. And it’s in accordance to Bills definition of “feedback function”.
KM : Each perception that the individual is controlling at a given moment, that is, anything in the individual’s current perceptual world that would prove disturbing if arbitrarily changed or anything the individual is currently using to perform an action, would be the target of a feedback loop
HB : I understand that “feed-back” loop which is actually representing “control of perception”, and disturbances to that control and performance of action is what “feedback loop” is counteracting.
KM : Observing an individual in action, we would see an intricate ever-changing web of many thousands of feedback loops, some passing through objects near at hand, like a chair on which the individual sits or computer screen at which the individual gazes.
HB : I see no problem in Kents view about what control units are controllng and how “intersection” of control loops function. It’s PCT. LCS are controlling inside (perceptual control) and causing effects to environment, where they are “mixing” and are perceived by actors (sense organs) in shared environment and of course controlled as “control of perception”.
RM : And I think the study of “collective control” is, indeed, a special instance of multiple control systems and deserves to be treated as a special application of perceptual control.
HB : And how would you treat it differently ? Multiple control system controlling external environment with “Control of behavior” ? “Social collective control” follows the same rules of “perceptual control” in individuals with affecting environment with action and perceiving and thus follows Bills diagrams (LCS III).
RM : I think “collective control” is a good name for that application of PCT,
HB : All in all I’m glad Rick that you changed your mind about term “collective control” and that you’ll not demolish your home anymore.
RM earlier : Feel free to try again if you like but if you do please avoid using the term “collective control” since it elicits in me a strong urge to throw things at the computer screen;-)
RM : ….but as a description of the general phenomenon to be explained – controlling accomplished by control systems in separate individuals – rather than as an explanation itself.
HB : It’s interesting that you changed your mind just in right moment and you are not arguing that “people can control each other all the time”. I’m glad for this change. My oppinion is that you are right.
But as I see it this is the same as Kent is talking about. “Social collective control” is the result of “Perceptual control” in separate organisms and effects to common environment researched.
KM : To understand the sociological implications of this model of human agency as control of perceptions, we need to take a fresh look the relationship between human actors and their environments.
HB : Here are some examples from Kents PCT legacy about “relationship between human actors” :
Kent McClleand (1994) :
A PCT Definition of Force
In colloquial usage, force refers to physical violence. One person directly interferes with the bodily movements of another in order to prevent the other from acting. Hitting or grabbing another person is usually regarded as an act of force, as isthe use of a weapon to injure the other’s body. From a PCT viewpoint, force has been applied when the other person encounters a disturbance so great as to make him lose control of his own actions. Putting it more generally in PCT terms, and in terms of an interaction between individuals A and B, we get this definition:
A uses force on B when A acts with the intent of creating a disturbance for B which is serious enough to cause B to lose control of one or more of the perceptual variables B is currently controlling.
A PCT Definition of Coercion
Coercion refers to the threat of force. One person dissuades another from doing something by somehow reminding him of the possibility that force may be used. For example, one might warn off an intruder by assuming a fighting posture or displaying a weapon. Putting it in PCT terms,
A coerces B by acting to produce a disturbance which A intends B to perceive as initiating a sequence in which A’s actions will force B to lose perceptual control of one or more of B’s currently operative goals.
A PCT Definition of Influence
All of three of these strategies are more effective when combined with influence. We say one person has influenced another when the first has been able to tell the second what to think or do. We also describe it as influence when the second person imitates the behavior of the first. A single PCT definition for influence covers both those events.
A influences B by acting to create a disturbance from which B constructs a reference level for perceptual control of B’s own actions.
Boris
Best
Rick
In each case there is a single degree of freedom at issue, and you can get the virtual control situation described by Kent (and Professor Higgins in “My Fair Lady”, who, if I remember rightly, had the line “and rather than do either, we do something that neither wants at all.”)
Martin
Best
Rick
I don’t think there’s much reason to belabour the point further, because the issue seems to be not whether this kind of effect occurs when many control systems act on the same environmental degrees of freedom, but whether “collective control” means something quite different, the influence one controller has on another. These cross-influences can and do happen, creating all sorts of feedback loops both positive and negative. The question, as so often is the case on CSGnet, is how best to use the term “collective control”, one or the other exclusively (and which?) or both, with the distinction being context dependent. My preference is to use it exclusively for the influence of many control systems that makes it look to an observer or experimenter as though the variable is under the influence of a single control unit.
Martin
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery