RM: Yes, I would be interested in seeing what the parameter estimates
are for the two kinds of tasks. Maybe something like this:
Gain Damping
Delay (Transport Lag)
Position 90 100
150 msec
Angular Velocity 100 150
300 mec
I made up the entries; they are meant to represent possible average
values for one participant (averaging over several trials after
learning is complete by some criterion). This would be really nifty it
it came out that way. It would be quite relevant to work I am doing on
hierarchical control. Please keep me posted.
AM:
Sure. I’m guessing I’ll have the results in a month or so at most…
RM: Thanks. I’m not very good at reading object code but I think I found
the model code; here it is:
mPerc = mCurs - TargetVal[T];
mDelP = TransportLag(mPerc, timelag);
mErr = ModelRef - mDelP;
mHand = mHand + (Gain * mErr - Damping * mHand) * dt;
if (mHand > 1000) mHand = 1000;
if (mHand < -1000) mHand = -1000;
mCurs = mHand;
ModelPercep[T] = mPerc;
ModelDelPerc[T] = mDelP;
ModelCursor[T] = mCurs;
ModelHandle[T] = mHand;
FitErr[T] = mHand - SubjectVal[T];
PredictErr[T] = SubjectVal[T] - TargetVal[T];
T++;
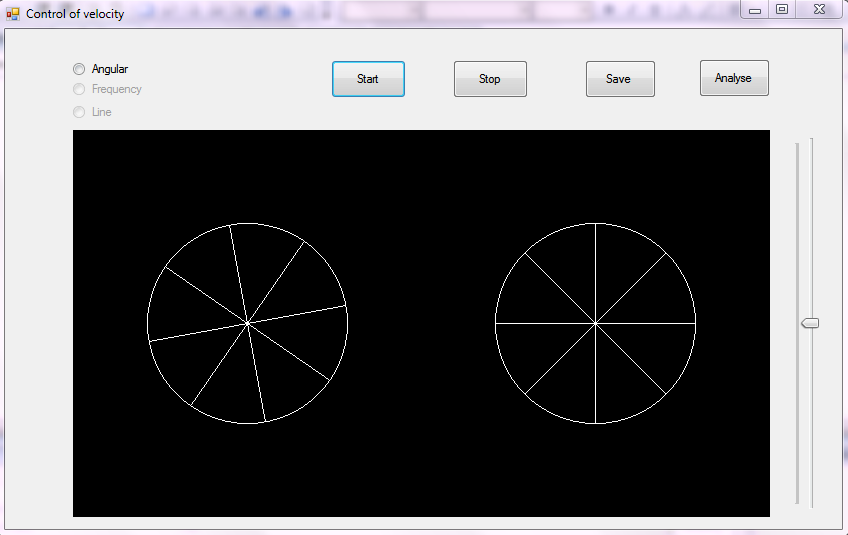
It looks like this is the model code for the pursuit traking task, not
the control of angular velocity task. Unless you are taking the cursor
(mCurs) to be directly proportional to angular velocity, which I
suppose it is.
AM:
Yes, the subject moves the slider up or down to increase or decrease angular velocity, and the values are directly proportional.
RM: In my model of angular velocity control (which I built
for other reasons than trying to get a transport lag estimate) I had
to actually compute the perception of angular velocity from the
observed movement of the cursor. That model, in case you haven’t seen
it, is at http://www.mindreadings.com/Coordination.html. That model
was built to imitate the findings in a coordinated movement task. But
your model looks great for your purposes – getting an estimate of
“delay” depending on the type of perception controlled.
AM:
I’ve seen it and showed it to other people. It’s a very effective demonstration of control of input vs control of output. I didn’t realise there was agular velocity control in the model until you mentioned it.
RM: This really looks like a very nice little study. I look forward to
seeing how it comes out.
I’ll keep you posted.
Thank you!
Adam
···
On Thu, Oct 18, 2012 at 7:31 PM, Richard Marken rsmarken@gmail.com wrote: