[From Rick Marken (2014.07.15.1050)]
···
Martin Taylor (2014.07.14.14.40)–
MT: True, but since in the absence of control, var(o)= 0, cv = d.
RM: I think you must know that this is not the case.But if not, you can demonstrate to yourself that it’s
not true using, once again, the “Control of Size” demo (http://www.mindreadings.com/ControlDemo/Size.html).
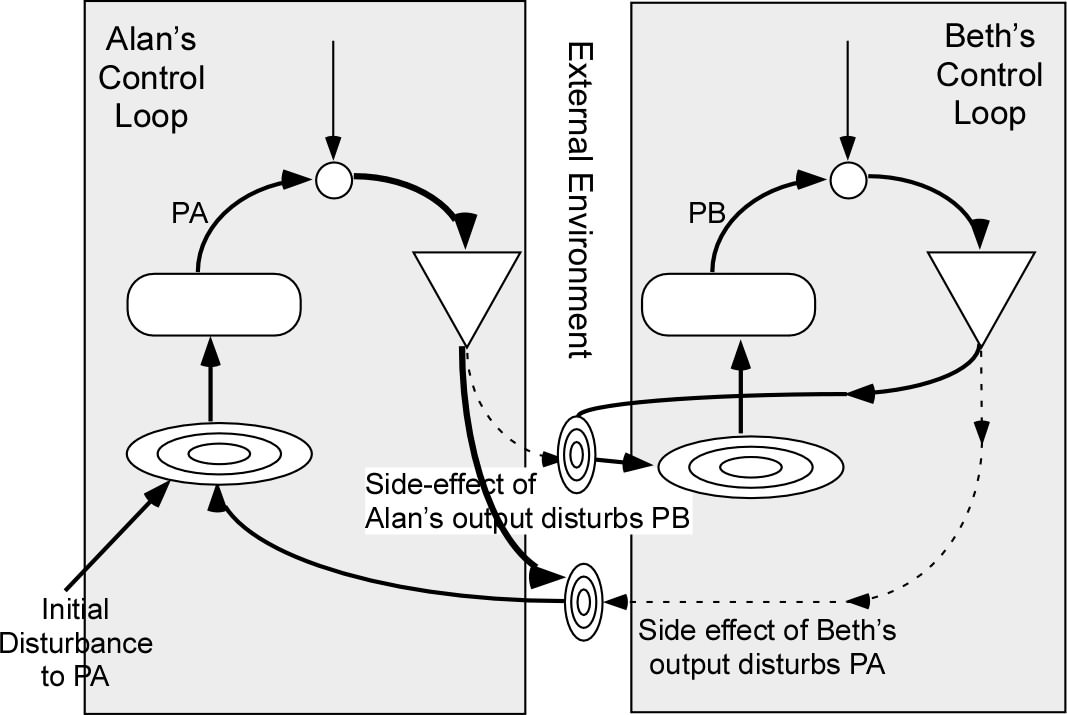
MT: As usual, we are talking at cross-purposes. I am comparingopen-loop with closed-loop conditions, whereas you are introducing
an added disturbance that is a side-effect of controlling
something else. It’s not surprising we come to different
conclusions.
MT: I think I didn’t word that very well. Let’s try again.
MT: A side-effect is an effect on something that is not in the control loop of the perception being controlled…when in Rick’s demo you control the area, a side-effect is that the perception of perimeter length may be influenced.
RM: I think you miss the point of the demo, which is that there are two perceptual aspects of the same physical situation that can be controlled. The physical situation is the rectangle on the screen which has height (h) and width (w). The computer varies h and mouse movement varies w. The two aspects of this situation that can be controlled are area (a) and perimeter (p):
a = w * h
p = 2* (w+h)
So a and p are two different aspects of the same physical variables, w and h. In order to control either a or p the subject must move the mouse to vary w in order to appropriately compensate for changes in the computer generated variations in h. So variations in w are the outputs (o) of the system controlling either a or p; and variations in h ara the disturbance to a and p. So we can write the equations for the two possible perceptions controlled in this demo as:
a = o * d
p = 2* (o + d)
If the subjects want to control a they must vary their outputs so that:
o = a’/d (1)
where a’ is the desired value of the area. If subjects want to control p they must vary their outputs so that
o = p’/2-d (2)
where p’ is the desired value of the perimeter.
Which perceptual aspect of the display the subject controls is selected by the subject. But regardless of which aspect of the display the subject chooses to control, a or p, there output will be varied as the means of controlling it. So o will be varying whether the subject is controlling a or p; output (o) will be varying as per eq. (1) if the subject is controlling a and as per eq. (2) if the subject is controlling p. Also, regardless of whether a or p is being controlled, both a and p will be varying, although a will be varying much less than p if a is under control and p will be varying less than a if p is controlled.
The demonstration shows that you can determine which perceptual aspect of the same physical situation is being controlled by the subject be computing the stability factor for both possible controlled perceptions, a and p. The stability factor for a is
S = 1 - var(log(a))/(var(log(o)+var(log(d)))
and that for p is
S = 1 - var(p))/(var(o)+var(d))
var(log(o)) and var(o) will be non-zero whether the subject is not controlling a (and, thus, controlling p) or not controlling p (and thus controlling a). So it’s not true that var(o) is zero when a perception is not under control. Outputs are always affecting many different perceptual aspects of the world simultaneously (as in the demo where variations in w are affecting both a and p at the same time). The goal of testing for controlled perceptions is to determine which perceptual aspects of a situation are being controlled by those outputs. The “Control of Size” demo is another approach to showing what is meant by control of perception: that we control various aspects of physical reality and that we can control different aspects of the same physical reality. Because of the latter fact, it is often difficult to determine what an organism is doing (what perceptual aspect of its environment it is controlling).
MT: Since, by the definition of the problem, the perception of perimeter is not being controlled, the output of the perimeter control system is zero, and any changes in the perimeter perception are due to the joint influences of the disturbance to, and any side-effects of, the area control system.
RM: Hopefully you can see now that this statement is incorrect.
Best regards
Rick
–
Richard S. Marken PhD