[From Bruce Abbott (2010.05.26.11:05 EDT)]
Bill Powers (2010.05.25.0855 MDT) –
Fred Nickols (2010.05.25.0731 PDT)
FN: Regarding your steering wheel example and Dag’s
point about
someone tugging at the wheel, I would imagine that
the controlled
variable isn’t the angle of the steering wheel but,
rather, the
unimpeded or free control of the movement of the
steering wheel.
BP: It’s simpler that that, I think. The higher-level
system controls
the direction in which the car is going (or its position
in a traffic
lane). It does so by varying the reference signal being
send to a
lower control system that keeps the wheel at whatever
angle is
currently set as a reference level. When someone tugs at
the wheel,
the first error is at the lower level: the wheel moves a
little,
creating an error relative to the reference signal being
received
from the car-steering system. That immediately produces
opposing
forces from the muscles of the arms, before the steering
system
senses any error in the position of the car. If the
disturbance is
large enough to cause the wheel to move at all (that
wouldn’t take
much force), the car will start to veer off course, and
very soon the
higher system will see an error in the direction or the
position of
the car in its lane. The higher system will change the
reference
position for the wheel-control system, just enough to
keep the car in
its lane even with the force still acting. A still-higher
system will
try to remove the disturbance, I would wager, by yelling
WHAT THE
HECK ARE YOU DOING??!!!. The person tugging on the wheel
has to be
careful when releasing the pressure, to allow the driver
to reduce
his opposing force slowly to zero. Letting go suddenly
would leave
the driver twisting the wheel to one side!
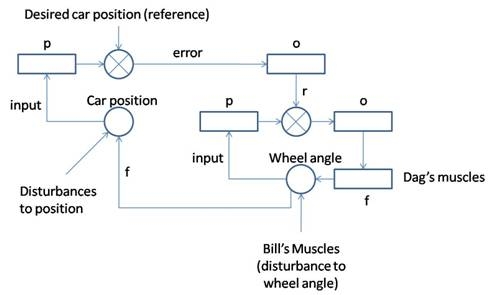
O.K. Bill, here’s a simplified
diagram of the car position-control system:
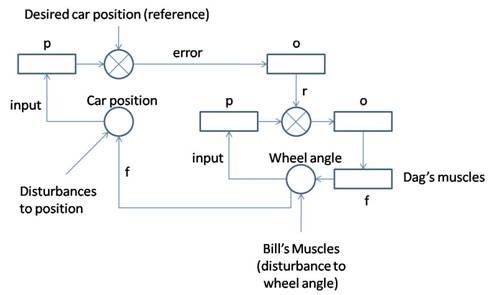
I’ve made the higher-level
system, controlling the position of the car relative to the lane, set the
reference for steering wheel angle, which in turn directly affects the car’s
position. In reality, steering wheel angle affects the direction and rate of
turn, which would be varied so as to change the car’s position (e.g., a little
left turn, then a little right turn, to move the car a bit to the left in its
lane). I wanted to avoid that added complexity to keep the diagram simple, saving
room for additional components to be added later.
Note the disturbance to the
steering wheel’s position that is being delivered via Bill’s arm muscles. What
I’d like to see added to the diagram is the higher-level system you described,
the one that, in your scenario, has the driver asking you what the heck you are
doing. I want to explore this model because it proposes something that seems a
bit different from the standard HPCT model: A system that detects the source of
a disturbance to another system and takes action to eliminate that source.
Bruce