Lots of mistakes in this overpriced guide from the wannabe leading authority on PCT. I’ll go over and comment the things I feel are not quite correct, or maybe some parts I think are unexpectedly good. I’m writing this as an exercise for myself, something like a journal club. If anyone wants to join the discussion, welcome.
So, let’s see, the first sentence on the cover got me thinking about causes:
“This book is a guide to doing a new kind of psychological research that focuses on the purposes rather than the causes of behavior.”
Yeah, I do want to know the causes of behavior. I want to know causes for changes in behavior, reasons for why people behave as they do. Nothing about control theory prevents learning about the causes of behavior. In a paper from 1980, “The cause of movements …” Rick explicitly names the reference signal as the cause of movements, so the purpose of the movement is the cause of the movement. A bit contradictory to the quoted sentence, and I think both are wrong. The behavior of the loop is the result of interactions of all of its elements, in the organisms and in the environments. Sure, the reference signal is causing things to change, but so is the stimulus and so are the changes in properties of loop functions.
If some element in the feedback loop was different, say the gain was much lower, then the movement would have been different, the gain change would have caused the difference. If anything, control theory promises to find the exact causes of behavior, while ‘conventional’ psychological research finds only correlations.
Nothing wrong with explanations of behavior that use the word “cause”, they are just pretty abstract and coarse-grained, more like a story than a precise model you can plug into a computer, run, and compare to the modeled system. Causal explanations are just stories, or maybe “program-level” explanations, abstractions over events, and relationships between them. The tracking task model is a “lower level” explanation, but we can still talk about how its elements cause some variables to change.
Ok, so my idea of what causes are is completely different from Ricks. Next…
“The conventional methods of psychological research completely ignore the existence of controlled variables”
Maybe. In some papers, I’ve found what I think are controlled variables hidden behind expressions such as “cue” or “salient stimulus”, “reward”, “goal”, “cost” etc. In motor control, some people are explicitly looking for controlled variables, using control theory, etc. But OK, there is certainly a need for different methods of research in psychology.
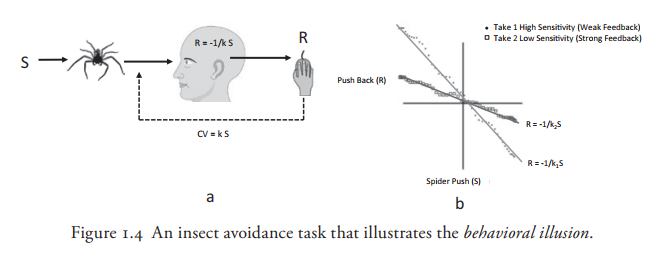
Rick thinks everything is a behavioral illusion:
“Perceptual Control Theory (PCT) – a theory that explains how living control systems work – shows us that, if organisms are living control systems, then the independent–dependent variable relationships that are found in conventional psychological research are actually side effects of the disturbance-resisting nature of these systems and, therefore, tell us more about the nature of the environment in which these systems do their behaving than about the systems themselves (Powers, 1978)”
Not at all. The 1978 paper talks about the relationship between continuously measured stimulus and behavior variables in a control experiment, not in ‘conventional’ correlational research with samples from populations and all that. It is debatable how useful they are, but the relationships found in ‘conventional’ research don’t say anything about the environment, that is just nonsense.
More later.
(P.S. Since most of my discussions with Rick ended in name-calling and insults, I think I’ll just not reply to any of his comments)