[Rick Marken 2018-09-03_12:51:15]
[Bruce Nevin 2018-08-31_08:08:00 ET] to Eetu  Pikkarainen
BN: It’s a bit hyperbolic to say “We have infinitely more organs for sensing our environment than organs to affect it.”
RM: Yes, but I think Eetu might be onto something very interesting here. If we change “organs” to “degrees of freedom”, “sensing” to “perceiving” and “infinitely” to “many” we get what I think is a rather profound observation:Â We have many more degrees of freedom for perceiving our environment than degrees of freedom for affecting it.Â
RM: In this context, “degrees of freedom” refers to the number of different independently variable input (perceptual) and output (motor) variables involved in the behavior of living systems The main output degrees of freedom in human behavior are the different ways the limbs can be moved so as to affect variables in the environment; the main input degrees of freedom are the different ways in which the variables in the environment can be perceived.Â
RM: We could probably come up a pretty exact estimate of the number of output degrees of freedom available to us under normal circumstances since we know a lot about the different independent ways in which the limbs can move. But it would be quite difficult to come up the the number of input degrees of freedom available to us since we don’t know much about the different independent ways in which we can perceive the world. Actually, finding the different ways in which organisms can perceive and, thus, control, the world is the main task of PCT research. But I think it’s possible to use the PCT model of behavior to show that the number of input degrees of freedom in human behavior is likely to be considerably greater than the number of output degrees of freedom. I will do that using my spreadsheet model of the behavior of a PCT hierarchy of control systems, a screenshot of which is shown here:
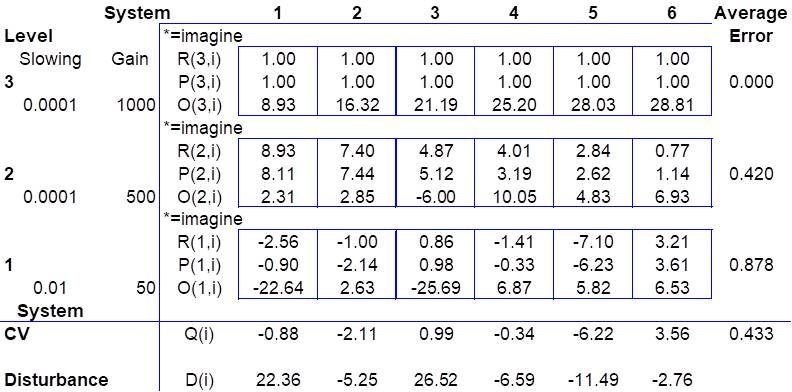
RM: Here we have a three level hierarchy of control systems with six control systems at each level. Each control system is made up of three variables: a reference input, R(j,i), a controlled perception, P (j,i) and output, O (j,i), where j indexes the level (1 to 3) and i indexes the system at that level (1 to 6). These control systems are operating in an environment consisting of six variables, labeled Q(i). The control systems at each level of the control hierarchy are controlling different types of perceptual variables. The lowest level control systems, which control the perceptions labeled P(1,i), control perceptual variables that are simply proportional to the Q(i); the control systems at the next level up, which control the perceptions labeled P(2,i), control perceptual variables that are linear combinations of the Q(i); and the highest level control systems, which control perceptions labels P(3,i), control perceptual variables that are logical relationships between the perceptual variables, P(2,i) at the level below.Â
RM: The only outputs of this hierarchy are the variables labeled O(1,i). These are the outputs that actually affect the state of the environmental variables that are being controlled. The outputs of the higher level systems, O(2,i) and O(3,i), are actually neural signals that contribute to the lower level references, R(j,i); they have no effect on the environment. So this hierarchy has only 6 output degrees of freedom. But it has 18 input degrees of freedom, which are the 18 different, independent perceptual variables that are being controlled by these 6 control systems.Â
RM: So in this system, the number of input degrees of freedom is 3 times the number of output degrees of freedom. I would guess that in humans the ratio of input to output degrees of freedom is much higher. That’s because we control so many different types of perceptions – that is, we do so many different things. We may have only 10 or so levels of control (as Powers has speculated) – that is, we may control only 10 or so different types of perceptual variable – but we control many different perceptions of each type. For example, if words are sequence type perceptions then there are quite a few different sequences we can produce with the same, small number of output degrees of freedom.Â
RM: So PCT explains how we are able to do so many different things with so few output degrees of freedom. It’s because we control perceptions, not outputs.Â
RM: By the way, here’s a pointer to the spreadsheet hierarchy model if anyone would like to play with it.Â
http://www.mindreadings.com/ControlDemo/SpreadsheetHierarchy.zip
Best
Rick
···
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery