[From Rupert Young (2016.07.03 19.45)]
Here's my latest effort for PCT in robotics.
Regards,
Rupert
[From Rupert Young (2016.07.03 19.45)]
Here's my latest effort for PCT in robotics.
Regards,
Rupert
[From Rick Marken (2016.07.03.1200)]
[From Rupert Young (2016.07.03 19.45)]
RY: Here’s my latest effort for PCT in robotics.
RM: This is wonderful stuff Rupert! The behavior of the arm is very smooth and realistic. I would love to see a diagram of the control architecture that is producing this behavior. Are there any atenfels in it;-)
RM: Best
Rick
–
Richard S. Marken
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers
[From Fred Nickols (2016.07.03.1520 ET)]
Yes, it is. Now build one that will run and catch a fly ball and the DoD will go bonkers!
Fred Nickols, CPT
Writer & Consultant
“Assistance at a Distance”
Sent from my iPad
On Jul 3, 2016, at 3:00 PM, Richard Marken rsmarken@gmail.com wrote:
[From Rick Marken (2016.07.03.1200)]
[From Rupert Young (2016.07.03 19.45)]
RY: Here’s my latest effort for PCT in robotics.
RM: This is wonderful stuff Rupert! The behavior of the arm is very smooth and realistic. I would love to see a diagram of the control architecture that is producing this behavior. Are there any atenfels in it;-)
RM: Best
Rick
–
Richard S. Marken
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers
[From Kent McClelland (2016.07.03.1445)]
Nice, Rupert!
What happens when you drop the ball?
To Rick: Yes, of course, there’s an atenfel in this demo. It’s the ball used as the target.
Best to all,
Kent
[From Rupert Young (2016.07.03 19.45)]
RY: Here’s my latest effort for PCT in robotics.
RM: This is wonderful stuff Rupert! The behavior of the arm is very smooth and realistic. I would love to see a diagram of the control architecture that is producing this behavior. Are there any atenfels in it;-)
RM: Best
Rick
–
Richard S. Marken
“The childhood of the human race is far from over. We have a long way to go before most people will understand that what they do for others is just as important to their well-being as what they do for themselves.” – William T. Powers
[From Rick Marken (2016.07.03. 1255)]
Kent McClelland (2016.07.03.1445)
KM: Nice, Rupert!
KM: What happens when you drop the ball?
RM: I believe the ball will leave the visual field too quickly for the robot to track it. And as Rupert said, when the robot loses track of the ball it stops doing anything.
KM: To Rick: Yes, of course, there’s an atenfel in this demo. It’s the ball used as the target.
RM: Ah, thanks. So an atenfel is a disturbance variable. Why not just call it that?
Best
Rick
Best to all,
Kent
On Jul 3, 2016, at 2:00 PM, Richard Marken rsmarken@gmail.com wrote:
[From Rick Marken (2016.07.03.1200)]
–
[From Rupert Young (2016.07.03 19.45)]
RY: Here’s my latest effort for PCT in robotics.
RM: This is wonderful stuff Rupert! The behavior of the arm is very smooth and realistic. I would love to see a diagram of the control architecture that is producing this behavior. Are there any atenfels in it;-)
RM: Best
Rick
–
Richard S. Marken
“The childhood of the human race is far from over. We have a long way to go before most people will understand that what they do for others is just as important to their well-being as what they do for themselves.” – William T. Powers
Richard S. Marken
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers
[Martin Taylor 2016.07.03.15.59]
[From Rick Marken (2016.07.03.1200)]
I don't remember who said "It is better to keep your mouth shut and
be thought a fool than to open it and remove all doubt", but it sure
applies here, even allowing for the smiley.
Since every control loop necessarily has a minimum of one atenfel
between the output of the control unit and what you call the
controlled quantity and I call the CEV, one between the CEV and the
perceptual input function, and as Kent points out using the physical
object shorhand notation, the CEV itself, Rupert’s architecture has
a minimum of three atenfels, and I should imagine a great many more.
Martin
[FromRupert Young (2016.07.03 19.45)]
RY: Here's my latest effort for PCT in robotics. [https://youtu.be/jmwH0AZtGG4](https://urldefense.proofpoint.com/v2/url?u=https-3A__youtu.be_jmwH0AZtGG4&d=CwMFaQ&c=8hUWFZcy2Z-Za5rBPlktOQ&r=-dJBNItYEMOLt6aj_KjGi2LMO_Q8QB-ZzxIZIF8DGyQ&m=WXAFJpbweIrya6XN5mQp1Mm2nBzyaqQoKf0FuaOuloI&s=aqewnZYhGKe1Ltn4LVxfvkIa3Zs7E8rouPAPFnIQV38&e=)
RM: This is wonderful stuff Rupert! The behavior of the arm is
very smooth and realistic. I would love to see a diagram of
the control architecture that is producing this behavior. Are
there any atenfels in it;-)
[From Rupert Young (2016.07.03 23.00)]
(Rick Marken (2016.07.03.1200)]
Thanks. Yes, see attached, sorry all I have at the moment.
What's an atenfel?
Rupert
RM: This is wonderful stuff Rupert! The
behavior of the arm is very smooth and realistic. I would love
to see a diagram of the control architecture that is producing
this behavior.
RM: Are there any atenfels in it;-)
[From Rick Marken (2016.07.03.1545)]
Martin Taylor (2016.07.03.15.59)
MT: I don't remember who said "It is better to keep your mouth shut andbe thought a fool than to open it and remove all doubt", but it sure
applies here, even allowing for the smiley.
RM: A google search reveals that there is not much certainty regarding who said this first. I always though it was Lincoln or Twain and, indeed, those are the two main contenders, but it’s likely that it was not first said by either of them. But it’s the kind of thing they would have said.
MT: Since every control loop necessarily has a minimum of one atenfelbetween the output of the control unit and what you call the
controlled quantity and I call the CEV,
RM: “Controlled quantity” is what Bill Powers called it so I am just using his terminology since CSGNet is about his theory.
MT: one between the CEV and theperceptual input function, and as Kent points out using the physical
object shorhand notation, the CEV itself, Rupert’s architecture has
a minimum of three atenfels, and I should imagine a great many more.
RM: My lack of enthusiasm for the concept of “atenfel” results from the fact that I have seen no evidence that it is a necessary extension to PCT. And by “evidence” I mean some kind of empirical demonstration (such as those in Bill’s and my demos or Rupert’s robot simulations) that the concept is necessary. Maybe it’s just me but one of the main attractions of PCT for me was that every aspect of the model was testable. And Powers showed how the model could be tested. He also developed the model to be as complete an explanation of behavior as possible. So what I thought (and still think) Is most needed for the development of PCT is research aimed at testing the model Bill developed; Bill did the theorizing (and some of the testing); now it’s our job to do the testing (and extending *if necessary) *based on the tests…
RM: I believe changes to the model – even if they are just changes in or additions to terminology, which seems to be what “atenfel” is – should be made only if they are required by the results of research. If the concept of “atenfel” is indeed necessary to explain the results of rigorous research on (not just imaginings about) social behavior, then I would consider it an important addition to PCT. But if it’s just more theorizing for the sake of theorizing then it is not theorizing done in the mold of that done by Powers in the development of PCT. Powers always checked his theorizing against data (the 1971 “Analysis of a rat experiment”, for example), real time demonstrations (like those at http://www.pct-labs.com/ and http://www.mindreadings.com/demos.htm) and simulations (like those of Richard Kennaway and the robotics work of Rupert Young, Adam Matic).
RM: Theorizing unchecked by data is what economists do, and look where that got us. I’m sure your and Kent’s papers in LCS IV will show why the concept of “atenfels” is needed. And it will show why by presenting the data that can’t be easily explained by PCT as it was developed by Pwers. And I’m sure the data will be rigorous and quantitative data, not just verbal anecdotes. So I look forward to seeing your papers. But right now I’m still not sure I know what an atenfel is or why the concept is needed.
Best
Rick
–
Richard S. Marken
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers
RM: This is wonderful stuff Rupert! The behavior of the arm isvery smooth and realistic. I would love to see a diagram of
the control architecture that is producing this behavior. Are
there any atenfels in it;-)
[Ted Cloak (2016.07.03.17,10 MST)]
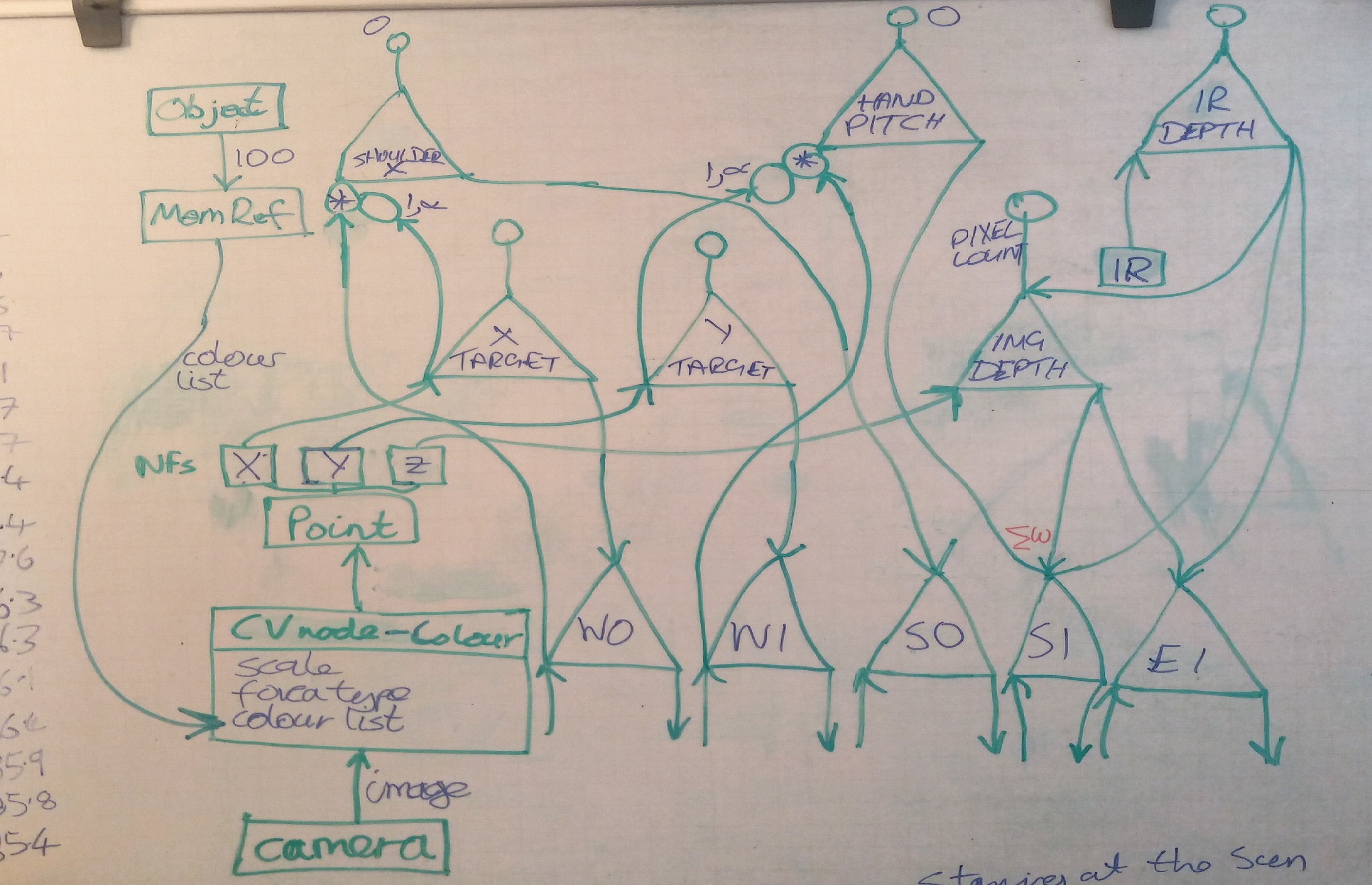
It would help me a lot to see a diagram of the control systems, in hierarchy, operating here. I noticed in Rupert’s diagram that there was no mention of the
elbow, only the shoulder and wrist, which both twist and bend to follow the ball. On re-viewing the following experiment I saw that the elbow was not involved.
Other than that, sorry to say, I’d need a complete explanation of Rupert’s diagram.
And yes, I’d love to see a diagram of the control systems involved and their hierarchy.
Best
Ted
From: Richard Marken [mailto:rsmarken@gmail.com]
Sent: Sunday, July 03, 2016 4:45 PM
To: csgnet@lists.illinois.edu
Subject: Re: Dynamic Visual Robot Arm Control
[From Rick Marken (2016.07.03.1545)]
Martin Taylor (2016.07.03.15.59)
RM: This is wonderful stuff Rupert! The behavior of the arm is very smooth and realistic. I would love to see a diagram of the control architecture that is producing this behavior. Are there any atenfels in it;-)
MT: I don’t remember who said “It is better to keep your mouth shut and be thought a fool than to open it and remove all doubt”, but it sure applies here, even allowing for the smiley.
RM: A google search reveals that there is not much certainty regarding who said this first. I always though it was Lincoln or Twain and, indeed, those are the two main contenders, but it’s likely that it was not first said by either of
them. But it’s the kind of thing they would have said.
MT: Since every control loop necessarily has a minimum of one atenfel between the output of the control unit and what you call the controlled quantity and I call the CEV,
RM: “Controlled quantity” is what Bill Powers called it so I am just using his terminology since CSGNet is about his theory.
MT: one between the CEV and the perceptual input function, and as Kent points out using the physical object shorhand notation, the CEV itself, Rupert’s architecture has a minimum of three atenfels, and I should imagine a great many more.
RM: My lack of enthusiasm for the concept of “atenfel” results from the fact that I have seen no evidence that it is a necessary extension to PCT. And by “evidence” I mean some kind of empirical demonstration (such as those in Bill’s and
my demos or Rupert’s robot simulations) that the concept is necessary. Maybe it’s just me but one of the main attractions of PCT for me was that every aspect of the model was testable. And Powers showed how the model could be tested. He also developed the
model to be as complete an explanation of behavior as possible. So what I thought (and still think) Is most needed for the development of PCT is research aimed at testing the model Bill developed; Bill did the theorizing (and some of the testing); now it’s
our job to do the testing (and extending *if necessary) *based on the tests…
RM: I believe changes to the model – even if they are just changes in or additions to terminology, which seems to be what “atenfel” is – should be made only if they are required by the results of research. If the concept of “atenfel”
is indeed necessary to explain the results of rigorous research on (not just imaginings about) social behavior, then I would consider it an important addition to PCT. But if it’s just more theorizing for the sake of theorizing then it is not theorizing done
in the mold of that done by Powers in the development of PCT. Powers always checked his theorizing against data (the 1971 “Analysis of a rat experiment”, for example), real time demonstrations (like those at http://www.pct-labs.com/
and http://www.mindreadings.com/demos.htm
)
and simulations (like those of Richard Kennaway and the robotics work of Rupert Young, Adam Matic).
RM: Theorizing unchecked by data is what economists do, and look where that got us. I’m sure your and Kent’s papers in LCS IV will show why the concept of “atenfels” is needed. And it will show why by presenting the data that can’t be
easily explained by PCT as it was developed by Pwers. And I’m sure the data will be rigorous and quantitative data, not just verbal anecdotes. So I look forward to seeing your papers. But right now I’m still not sure I know what an atenfel is or why the concept
is needed.
Best
Rick
–
Richard S. Marken
“The childhood of the human race is far from over. We have a long way to go before most people will understand that what they do for others is just as important to their well-being as what they do for themselves.” – William T. Powers
[From Rick Marken (2016.07.03.1640)]
Rupert Young (2016.07.03 23.00)
RY: Thanks. Yes, see attached, sorry all I have at the moment.
RM: Thanks!! I think I understand much of it. It’s certainly a hierarchical control of perception model. It looks like the references for x, y target position as well as for shoulder x, hand pitch and IR depth are fixed. And I presume that WO, WI, SO, SI and EI are wrist movement out, in, shoulder movement out, in and elbow movement in, respectively.
RM: Anyway, good show!
RY: What’s an atenfel?
RM: I’m not sure. It could be the low level control systems (like WO, WI) that are used by higher level ones, and/or the physical relationship between the position of the arm (output) and the ball; and/or the ball itself, and or the optical connection from the ball to the sensor (camera) input. Or none of those things. Fortunately, you didn’t have to know about them to build you lovely control system. Maybe what an atenfel is, and why it’s important, will become evident when you get a mate for Baxter. It’s apparently relevant mainly to social interactions.
Best
Rick
–
RM: This is wonderful stuff Rupert! The
behavior of the arm is very smooth and realistic. I would love
to see a diagram of the control architecture that is producing
this behavior.
RM: Are there any atenfels in it;-)
Richard S. Marken
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers
[From Rick Marken (2016.06.03.1910)]
Rupert Young (2016.07.03 19.45)
RY: Here’s my latest effort for PCT in robotics.
RM: My wife and I just got off a FaceTime call with our 2 3/4 year old granddaughter who likes to play robot with her Nana. So I told her I could show her a real robot and I showed her this video of yours and she was completely mesmerized. She watched the whole thing 3 times (at her insistence). I think she was intrigued by how realistic the movement was. She was also interested in whether the robot would ever catch the ball. OK, that was probably the main attraction. But still, she’s not even three and she couldn’t take her eyes off it; just fascinated. I explained the principles of it to her and she seemed quite interested in that too. So I think we have a budding PCT control engineer/roboticist on our hands; and you have a very nice demo. The realism of the movement is very compelling (my wife and daughter were fascinated and impressed as well). So kudos on a brilliant (and I mean that in the old fashioned way, as “very intelligent”; not in the overly polite British way as in, “thanks for doing that”![]() demonstration of behavior created using the principles of control of perception.
demonstration of behavior created using the principles of control of perception.
Best
Rick
–
Richard S. Marken
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers
[From Rupert Young (2016.07.03 19.45)]
(From Rick Marken (2016.06.03.1910)]
RM: My wife and I just got off a FaceTime call with our 23/4 year old granddaughter who likes to play robot with her
Nana. So I told her I could show her a real robot and I
showed her this video of yours and she was completely
mesmerized. She watched the whole thing 3 times (at her
insistence). I think she was intrigued by how realistic the
movement was. She was also interested in whether the robot
would ever catch the ball. OK, that was probably the main
attraction. But still, she’s not even three and she couldn’t
take her eyes off it; just fascinated. I explained the
principles of it to her and she seemed quite interested in
that too. So I think we have a budding PCT control
engineer/roboticist on our hands; and you have a very nice
demo. The realism of the movement is very compelling (my
wife and daughter were fascinated and impressed as well). So
kudos on a brilliant (and I mean that in the old fashioned
way, as “very intelligent”; not in the overly polite British
way as in, “thanks for doing that”demonstration of
behavior created using the principles of control of
perception.
Thanks, very interesting. Catching, or grasping, the ball is the
next step. As you probably noticed the arm is moving in the X and Y
directions, but not Z (arm reach). I did try using a depth signal
from the infra-red sensor and also from the object size in the image
but both were quite volatile. For the infra-red sensor if it was
slightly off centre then the signal would be lost, and the actions
of moving in and out would disturb the line of sight. The image
depth was better but still not too good. These were swtiched off for
this demo. Further work is required.
In the future being a PCT control engineer/roboticist will be one of
the main occupations children will dream about for when they grow up
along with firefighter, astronaut and
celebrity-who-does-nothing-and-has-no-purpose-apart-from-deriving-self-esteem-from-the-fauning-admiration-of-complete-strangers.
Regards,
Rupert
[From Ted Cloak (2016.07.04.1530 MST)]
I cannot see the control hierarchy in RY’s diagram. Would it not be possible to diagram the operation using units representing control systems?
Representing each control system (CS) by the reference signal entering its comparator, I’d start here, each CS setting the reference signal for the one(s) below:
Top CS: Orange ball image in camera’s fovea
Next CS: Orange ball image moving toward fovea
Next CSes: Orange ball image moving toward fovea from | above | below | left | right |
Next CSes, from each of above: 3-dimensional angles of shoulder, elbow, wrist
Next CSes control perceptions of changes in angles, adjusting the reference signals
of CSes for shoulder pitch, roll, and yaw;
for elbow pitch, roll, and yaw;
for wrist pitch, roll, and yaw;
and then on to torques, watts, etc.
I note that the perceptual inputs of the top three come from the camera; the rest, from sensors in the joints etc.
In nature, I suppose, the values of those reference signals would come from trial and error: evolution and (mostly very early) learning. In the lab, I suppose,
at some level they have to be provided by the experimenter. Maybe that should be “resting values” or “range of values”.
[From Rick Marken (2016.07.03.1640)]
Rupert Young (2016.07.03 23.00)
RM: This is wonderful stuff Rupert! The behavior of the arm is very smooth and realistic. I would love to see a diagram of the control architecture that is producing this behavior.
RY: Thanks. Yes, see attached, sorry all I have at the moment.
RM: Thanks!! I think I understand much of it. It’s certainly a hierarchical control of perception model. It looks like the references for x, y target position as well as for shoulder x, hand pitch and IR depth are fixed. And I presume that
WO, WI, SO, SI and EI are wrist movement out, in, shoulder movement out, in and elbow movement in, respectively.
RM: Anyway, good show!
RM: Are there any atenfels in it;-)
RY: What’s an atenfel?
RM: I’m not sure. It could be the low level control systems (like WO, WI) that are used by higher level ones, and/or the physical relationship between the position of the arm (output) and the ball; and/or the ball itself, and or the optical
connection from the ball to the sensor (camera) input. Or none of those things. Fortunately, you didn’t have to know about them to build you lovely control system. Maybe what an atenfel is, and why it’s important, will become evident when you get a mate for
Baxter. It’s apparently relevant mainly to social interactions.
Best
Rick
–
Richard S. Marken
“The childhood of the human race is far from over. We have a long way to go before most people will understand that what they do for others is just as important to their well-being as what they do for themselves.” – William T. Powers
(Ted
Cloak (2016.07.03.17,10 MST)]
It
would help me a lot to see a diagram of the control systems,
in hierarchy, operating here. I noticed in Rupert’s diagram
that there was no mention of the elbow, only the shoulder
and wrist, which both twist and bend to follow the ball. On
re-viewing the following experiment I saw that the elbow was
not involved.
(Ted
Cloak (2016.07.04.1530 MST)]
I
cannot see the control hierarchy in RY’s diagram. Would it
not be possible to diagram the operation using units
representing control systems?
I
note that the perceptual inputs of the top three come from
the camera; the rest, from sensors in the joints etc.
In
nature, I suppose, the values of those reference signals
would come from trial and error: evolution and (mostly very
early) learning.
Rupert, that is really fascinating! I gather that there are no particular instructions related to how the arm tracks the object?
On 07/03/2016 12:46 PM, Rupert Young wrote:
[From Rupert Young (2016.07.03 19.45)]
Here's my latest effort for PCT in robotics.
Regards,
Rupert
Vyv Huddy (2016.08.09 9:57)
[From Rupert Young (2016.07.03 19.45)]
RY: Catching, or grasping, the ball is the next step. As you probably noticed the arm is moving in the X and Y directions, but not Z (arm reach).
VH: I noticed the PC monitor in the left corner seems to have the video from the camera on board the arm displayed? It would make an even better demo if there was a spilt screen with this footage perhaps even with the target reference value marked.