[Martin Taylor 2013.06.30.17.03]
OK, Lloyd, here's an attempt to start what you are asking for. In
the following I’m trying to model a description targeted at someone
quite unaccustomed to the engineering approach to control, so please
will any grandmothers reading it please forgive my instructions on
egg-sucking technique (unless I have made some mistakes).
···
I’ve changed the subject line because this isn’t relevant to the
use of language in PCT, and because it could lead to a discussion
of how to approach teaching the engineering principles behind PCT.
[From Lloyd Klinedinst(2013.06.30.1446)]
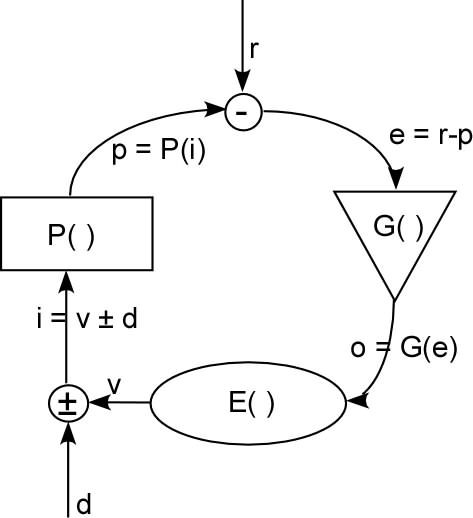
The simple equations I have worked with from some early workshopin PCT are: e = r - p and cv = a + d. Then I know something like
an equation needs to occur for cv to become iq and
then get further transformed through the Input function to become
a p and get recycled. I look forward to CSGers confirming and
correcting these simple equations I have been working with. This
is why I would value PCT-standardized progressively simple to
complex sets of equations to express mathematically the scientific
core of PCT.
variables*.* *** we cannot ever write an equation that
relates the instantaneous values all around the loop at the same
moment in time.***
*** Any equation that takes account of the variation
in values of loop variables must also explicitly represent time.***
*** There are only two input variables to the loop ,“r”
and “d”,***
One canno******t.***