[From Bruce Abbott (2010.01.02.1400
EST)]
During the 1930s my grandfather
experimented with a system to reduce noise in the radio receivers of the day.
His idea was to use two receivers, one tuned to the frequency of the signal and
the other to another frequency, just off the main frequency, which presumably
would receive much of the same relatively broad-band noise. The phase of the
audio signal from the off-frequency channel was inverted and summed with the
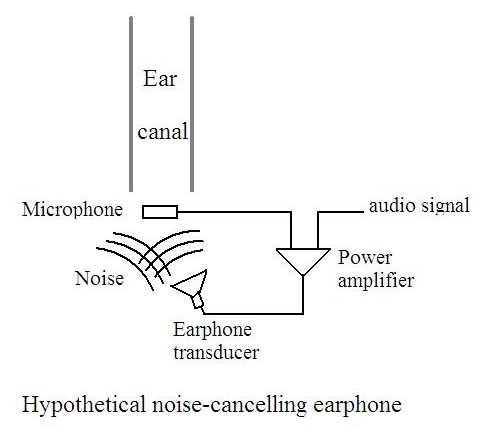
audio signal of the main frequency. Much the same thing is done today in “noise-cancelling”
headphones: a microphone picks up external sounds and, after suitable inversion
and scaling, beats this signal against the one being heard inside the
headphones. (The latter includes the intended audio plus external noise that
leaks through the insulation of the headphone ear cups.)
In both cases, we have noise
mixed in with the intended signal. A sensor picks up what is intended to be the
noise alone. If we label the noise as “disturbance,” then these
systems sense the disturbance to the signal and use that signal to create an
opposing action that cancels out the disturbance. Their ability to function
well depends on adequate sensing of the disturbance and correct calibration
(e.g., the inverted noise signal must be scaled to have the same magnitude as
the noise component of the main signal and opposite phase).
These seem to meet the
definition of feedforward control as given in engineering. Or am I missing
something?
In the case of the
noise-canceling headphones, I can envision a system that would employ feedback
rather than feedforward. A microphone inside the cups of the headphone
would pick up the sound, which would include the audio plus any noise leaking
through the ear cups from outside. This signal could be compared to the
intended audio signal (reference signal) and output adjustments made to
diminish the difference. But this would seem to require a rather complex
device, one capable of adjusting a wide range of frequencies simultaneously,
each to the exact amount required depending on the amplitudes of the various
frequencies present in the disturbance. In this case the feedforward system
would appear to be simpler and more effective.
Bruce