I disagree with the notion that a position controller controlling a velocity controller can be considered as “hierarchical PCT”. This is simply because position and velocity do not have a hierarchical relationship, in the sense that position does not “contain” velocity as the real numbers contain the integers. However, this notion is tangential to the purpose of this post.
The purpose of this post is to discuss the diagram on page 89 of LCSIII, which I have adapted by removing the spring and replacing it with a point of mass: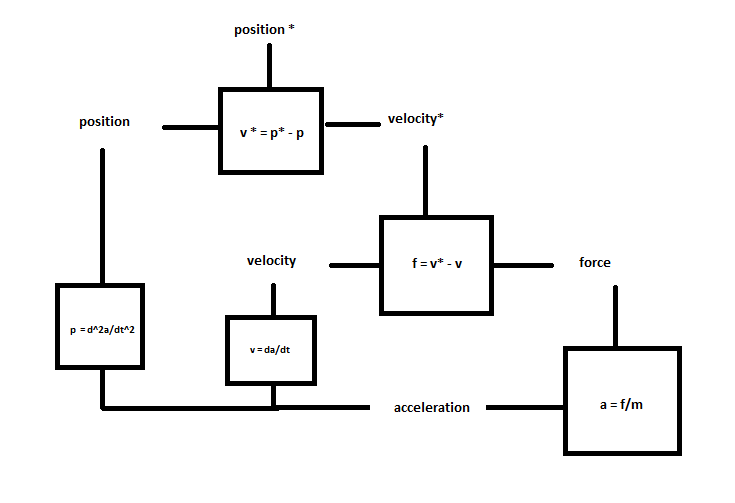
This model contains the following equations:
p* - d^2a/dt^2 = v* (1)
v* - da/dt = a (2)
Substituting the left side of (1) into v* in (2), yields:
p* - d^2a/dt^2 - da/dt = a
p* - a’’ - a’ = a
p* = a + a’ + a’’
Can someone please discuss the behavior of the solution to this equation?
[Martin Taylor 2018.03.14.23.49]
How does one controller control another? They don't in hierarchical
PCT.
No, they don’t. In Bill’s simulations (and in mine) velocity
sometimes is at a higher level than position (as it is in the
formally described levels) and sometimes lower, since muscles can
affect only acceleration in a friction-free environment or only
velocity in a viscous environment, and cannot directly control
position other than by the integration of velocity and/or
acceleration. Position does not contain velocity in one hierarchical
arrangement, and velocity does not contain position in the other.
Nor does one control the other. All that the upper one does is send
a reference value to the other, and possibly incorporate the
perceptual value from the lower as one of the inputs to its
perceptual input function.
The position reference cannot be compared with the second derivative
of velocity (jerk) or the velocity reference with the time
derivative of acceleration (again jerk). They are dimensionally
incommensurable. You want integrations, not differentiations, to get
the dimensions correct.
v = integral a dt, and p = integral v dt, which respectively are
then compared with their v* and p* reference values.
Martin
···
On 2018/03/14 6:03 PM, PHILIP JERAIR
YERANOSIAN wrote:
I disagree with the notion that a position
controller controlling a velocity controller can be considered
as “hierarchical PCT”.
This is simply because position and velocity do
not have a hierarchical relationship, in the sense that position
does not “contain” velocity as the real numbers contain the
integers.
However, this notion is tangential to the purpose
of this post.
The purpose of this post is to discuss the diagram on page
89 of LCSIII, which I have adapted by removing the spring and
replacing it with a point of mass:
This model contains the following equations:
p* - d^2a/dt^2 = v* (1)
v* - da/dt = a (2)
Substituting the left side of (1) into v* in (2), yields:
p* - d^2a/dt^2 - da/dt = a
p* - a’’ - a’ = a
p* = a + a’ + a’’
Can someone please discuss the behavior of the solution to
this equation?
