[From Bill Powers (2010.06.17.0213 MDT)]
Martin Taylor 2010.06.15.14.36 –
BP earlier: In the case where a
disturbance affects a higher-order system, it can do so only if there are
no control systems involved at levels below the place where the
higher-order system receives the disturbing signal.
MT: Slight amendment: add “perfect” between “no” and
“control systems”. When a control system at an intermediate
level is imperfect, some effect will persist, even though diminished by
the intervening control system.
It has to be “no” alone because otherwise the experimenter
can’t know the effect his manipulations of environmental variables used
as disturbances (stimuli) are having at the level in question, here the
relationship level. For example, if the quantitative brightness of the
light-bulb mattered, that is if different brightnesses resulted in
different behaviors, the iris control system would frustrate the
experimenter’s attempt to manipulate the brightness sensed by the
subject. There would be variations in sensed brightness, but they would
not be the same, statically or dynamically, as the brightness variations
of the light bulb measured by the experimenter. So any observation of a
relationship between the brightness of the light-bulb and the subject’s
actions would be misleading.
This shows up in numerous contexts. Consider Marken’s baseball-catching
control system models. If the trajectories in laboratory space are used
to describe the way balls and fielders move, you can derive equations
showing how the latter depends on the former, and I suppose solve them
with great labor. But if you realize that the fielder is controlling the
apparent movements of the ball in fielder-centered space, the
controlled variable now becomes a path on the retina, not in the baseball
stadium, and the disturbances of this path are very different from what
someone in the bleachers would see, because they are affected even at the
lowest level by the fielder’s own body orientations and
movements.
MMT : I recognize your issue,
though except for special cases where the distinctions are of interest, I
don’t see the need for using different words. The level at which a
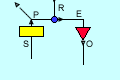
control unit operates does not affect its basic structure:
The blank area at the bottom is “the environment” of the
control system. It can be filled with anything – multiple levels of
control to which the output “O” provides a single reference
value, or O may be simply a direct output to the environment as seen by
an external observer. Likewise on the input side, S may be a direct input
from the observer-visible environment or a combination of perceptual
signals from lower level perceptual functions, controlled and
uncontrolled. For control to operate, all that is required is that
somewhere through that maze of possibilities there is a pathway, however
complex, whereby variation in O can influence the value of S. We often
symbolize that simple or complex pathway by a single line in a
diagram.
The problem here is how the experimenter can know what those hidden paths
are, especially when they can include invisible effects of the subject’s
own outputs. The experimenter is stuck in the environment and can
manipulate and observe only environmental variables. With a suitable
model, the experimenter can imagine how the environmental variables look
to the subject, and use a modified definition of higher-order controlled
quantities and disturbances, but then any deductions are model-dependent
and will be different from deductions that take the experimenter-centered
measures of the variables at face value.
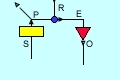
In your discussions, you assume that you can somehow bypass the
“environment” that can be “filled with anything” and
know what S in the above diagram really is. This is even more pertinent
if O in the diagram also affects the yellow box and the perception p: if
the connection from O to p is internal to the subject, the experimenter
has no way of knowing what the effective input to the yellow box is, and
thus can’t measure the value of p.
As experimenter, you can know and measure only what is in the environment
common to you and the subject, and even then, it is your own perceptual
input functions that supply the values of higher-order variables, while
in the subject the variables might be entirely different or have
different values. Only a model can offer a way of reconciling the two
points of view.
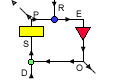
MMT: In this diagram, the
variable D represents any influence on S other than that of O. S is the
input to the perceptual function of the control unit, whatever its level.
Only the nature of the perceptual (and possibly the output) function
distinguishes a control unit at one level from a control unit at another.
I have always considered D to be the disturbance to the control unit, no
matter how many perceptual levels have intervened between the sensory
inputs and the arrival of their influence at the input to the perceptual
function of the control unit of interest.
BP: This point of view is unavailable to you when you do experiments, for
the very reasons you point out here. You are speaking as if the
experimenter has a way of knowing the value of D in the diagram above,
when all he can manipulate are variables that are sensed by the subject
at the first level of perception and when he knows nothing of the
processes between that level and the level where you’re defining
D.
To say anything at all about a disturbing perceptual signal, which is the
nature of D above, you need a model of the levels of perception and
control that exist between the depicted level and physical variables in
the external environment.
MMT: I see no reason to make a
distinction between influences at the physical sensors (which are
probably not the input functions to any control unit) and influences on
the inputs to control units at any level.
BP: I hope that what I am saying will persuade you that this distinction
can be extremely important.
Also, I think there is an unresolved misalignment of our views of
perception. When you say that physical sensors are probably not inputs to
control units at any level, you’re saying that there are no higher levels
of perception and control. What other kinds of sensors are there? Don’t
all perceptions, at all levels, begin as intensity signals coming from
physical sensors? This certainly applies in your Layered Protocol scheme:
all communciations come in through the senses, and the messages shown as
passing between higher levels are only virtual; the actual paths go all
the way down to the first level, through the environment, and enter the
other system only through the first level.
MMT: So my suggestion is to use
“disturbance” in reference to the totality of influences on the
perceptual input of a control unit that are not due to the output from
that control unit. That’s how I have been using the term, and even after
reading your explanation of why it is inappropriate, I still think it
easier to treat all control units the same way, without regard to their
level in the hierarchy (except, of course, for the specific differences
inherent in their differing levels).
It may be easier, but you can’t link that kind of analysis to any
experimental procedures. What you say is hypothetically correct, but
unobservable. It leaves an unanalyzed void where a model is needed. When
you say “the totality of influences,” you’re avoiding
references to any of them and implying that you can never know the actual
net value of any disturbance.
BP earlier: As you can see, if
you use the term disturbance only to refer to environmental variables,
this apparent contradiction is eliminated. The disturbance at the second
level is different from the stimulus because it is not a disturbance. It
is a perceptual signal. It is not a variable in the environment. But the
stimulus is a disturbance because it, too, is an independent variable in
the environment, and fits the definition of a disturbance.
MMT: Well, in nearly two decades of CSGnet discussion, I don’t remember
ever seeing a definition of a disturbance that requires it to be
perceptible by an external observer.
BP: Then you have let your own initial interpretation of the term keep
you from seeing how other people are using it. I always refer to
disturbances as something in the environment. This is the result of using
experiments and simulations in which there is ALWAYS an environmental
disturbance acting. I admit to having few models that involve many
levels, and most of my models show just one level, so I’m making
assumptions about any intervening levels when they’re not in the model.
But the disturbance itself is always in the form of a measurable
environmental variable, with effects that are seen in the behavior of
other environmental variables such as a cursor or target
position.
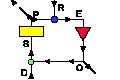
MMT: To my understanding, the
influence of the disturbance has always been proximal to the control unit
of interest. To ANY control unit, “the environment” is the
blank bit in the upper figure above. In contrast, your
“environment” exists only from the observer’s viewpoint, not
from the analyst’s viewpoint, and certainly not from the control unit’s
viewpoint. When we are being analysts, I think we should take that
viewpoint, and consider “the environment” to be whatever is
outside the control unit being analysed.
BP: I disagree. The environment is indeed described as I see it: cursor,
target, movements, relationships. But the model purports to describe how
everyone sees it, and incorporates ways to adjust the parameters
to get the best match with observations. I think we need to try to merge
the analyst role with the observer-experimenter’s role, not giving either
one priority. We have to consider both aspects: what we see, and how we
think it works. The analyst can’t work without data, and the data require
a model to make any sense of them.
Best,
Bill P.