[From Bill Powers (2009.10.02.1010 MDT)]
Martin Taylor 2009.10.01.15.06 –
MT: I see an ambiguity quite
different from the one you identify. I thought you were seeing the one I
see, because I never considered that the observable perturbation could be
identified as the disturbance, or as “d”. The ambiguity I saw
was between the variable that combines with the output variable to
generate qi and the source of that variable. It never occurred to me that
you might think of the disturbance as “the effect of D on qi”
or that you might think I would. So, if I now understand you correctly, I
think that what I assumed to be “the disturbance” is what you
“always mean”, because it is what I also always
mean.
BP: Sorry, but we’re still not on the same page. If it never occurred to
you that people use the same term, disturbance, to mean both the cause of
a perturbation and the perturbation itself, you must not read much. Have
you ever heard of sunspots causing a disturbance of communications? Or a
weatherman describing a “tropical disturbance?” Or a newsperson
reporting a heckler causing a “disturbance” at a political
rally? In fact, I think that usage may be more common than the other one.
I can think of “disturbing news” and other examples using the
gerund rather than the noun to indicate the cause. The passive form,
“disturbed”, would, I think, be used almost invariably to refer
to the effect instead of the cause. I have tried using “disturbing
variable” to indicate d as a cause, but it hasn’t caught on –
perhaps because there are others who, like you, appear not to have given
this distinction much importance, or perhaps even haven’t understood what
I’m talking about.
MT: I have always considered
“d” (the label on the arrow that joins the “o” arrow
to form the “qi” variable) to be a label sometimes for a signal
path and sometimes a label for the waveform of the signal on that path.
BP: I find this usage of “signal” awkward and contrary to all
technical uses of the term I have encountered. The effect of a signal is
not caused by the signal itself but by some device that detects a
microscopic signal and draws on local energy sources to produce some
macroscopic effect (or, of course, another microscopic signal). Without
the detector and energy conversion, the signal would have no important
effect at all, except on other signals. Signals operate at very low
energy levels compared to the ordinary phenomena of macroscopic physics.
This distinction has been made clear in every subject I have learned
about that involves signal processing.
I think of a disturbing quantity as something that has macroscopic
effects on another physical quantity, as a force affects the velocity of
a mass. Signals operate at the level of microwatts or nanowatts, forces
at watts or kilowatts.
MT: My understanding of the
“perturbation of the controlled quantity” is the net effect of
“o” and “d” in perturbing the value of
“qi”.
That seems to strand the concept halfway between cause and effect. You
refer to o and d as “perturbing” the value of qi, which turns
perturbation into a transitive verb, an action of o and d on something
else, but this seems to eliminate perturbation as the result of the
action, the change in qi. You’ve simply made “perturbation”
into a synonym of “disturbance” with the same ambiguity as
before. I intended the term perturbation to refer only to the change in
qi without any dependence on what caused the change. It is a perturbation
used in that sense that affects a control system, and to which the
control system responds by exerting some action opposed to the
perturbation. If the controlled variable is the position of a mass, the
control system can apply forces to the mass to oppose any perturbations,
departures from a reference position, basing its action solely on the
departures, without regard to their causes. Many different combinations
of disturbances could cause the same perturbation; the control process
would be the same.
I think this gets us closer to the roots of this dispute. I have a notion
that all this started when I criticised Ashby’s concept of a control
system. He proposed that a control system detects the state of a
disturbing variable, and computes how much output to apply to the
controlled variable to cancel the direct effect of the disturbance on the
controlled variable, like this:
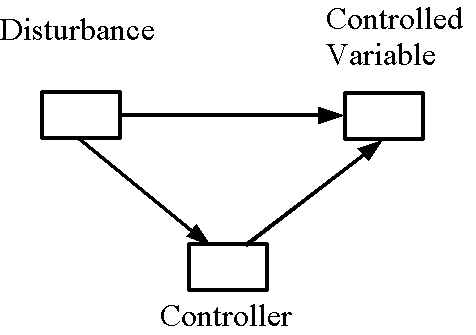
This is derived from diagrams in Ashby’s “An Introduction to
Cybernetics”, various places from p. 210 to p. 222 and
therabouts.
Of course Ashby never explained how this system comes into being; it
clearly has to be designed by some engineer who can see the effects of
the disturbance on the controlled variable, and can design a controller
that can be carefully adjusted (while the engineer watches the controlled
variable) to have just the magnitude, direction, and kind of effect
require to cancel automatically the effect of the disturbance – for
maybe 10 minutes, after which it has to be adjusted again in the same
way, by the same negative feedback control system. In touting the
superiority of this design over negative feedback control, Ashby ignored
every practical problem involved and all the machinery that would be
needed in the background to make this idea work. Oded Maler actually
found a German design for an apartment-building temperature control
system that worked this way. I’m glad I didn’t have to live
there.
I have countered this proposal (to little avail among cyberneticists) by
showing that a negative feedback control system can achieve just as good
stabilization of the controlled variable against disturbances as Ashby’s
would ( or better, in the real world), without needing any information
about the disturbance. I’m pretty sure that this statement is what set
you off on the insistence that information about the disturbance really
did exist inside the control system. It now turns out that you mean that
an external observer could deduce the nature of the disturbance by using
knowledge of all the details of the negative feedback control system,
which of course does not do the control system any good. Neither does it
mean that the control system needs knowledge of the state of the
disturbing variable in order to stabilize the controlled quantity against
the effects of the disturbing variable. The control system senses changes
in the controlled variable and acts directly on the controlled variable
to eliminate them; it does not need to know what caused those changes.
For what seems by now the thousandth time.
The information about the disturbance that does remain inside the control
system consists of the departures of the controlled variable from its
reference level – whatever small departures remain
uncontrolled.
So we got our wires crossed and have been arguing about nothing. Not for
the first time. All the information that the control system needs to
control the controlled variable is contained in the variations of the
controlled variable, without regard to what caused them. But to the
extent that control is imperfect, there is some residual information left
in what small variations are incompletely corrected. In a noise-free
system, the external observer could still reconstruct the waveform of the
effective disturbing variable from the small variations that are left,
but that isn’t how the control system achieves control.
Best,
Bill P.
P.S. In LCS3, Demo 8-1, ArmControlReorg, the control systems can learn to
control using only variations in the disturbances (start with reference
signals set to Constant). After 20 to 30 minutes of learning the errors
have become very small. At that point you can turn off the disturbances,
turn off reorganization, and set the reference signal pattern to Smooth
or Jump. The arm will dutifully move as the reference signals vary,
showing that control is good. You can turn the disturbances back on and
verify that they have only a small effect on the controlled variables,
the joint angles, while the Smooth or Jump reference pattern continues.
This shows that it is not behavior that is learned, but control.