[Eetu Pikkarainen 2019-01-18_10:42:25 UTC]
[Martin Taylor 2019.01.17.`5.42]
Fred Nickols (2019.01.17.1522 ET)
Fred, that is a nice dialogue!
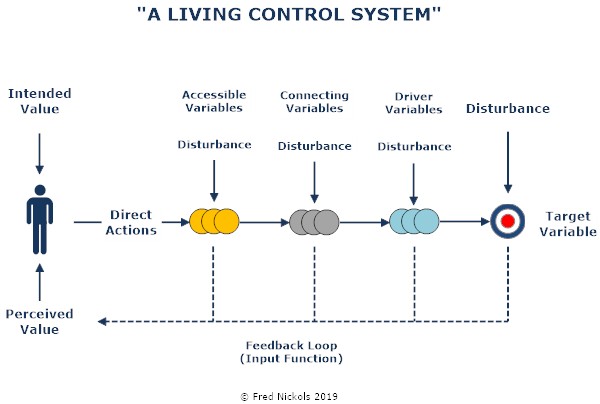
I much agree with Martin's comments. I would still add that in (at least some) PCT diagrams the "feedback function" is situated between the output of the controller and the input quantity (which is some times called "controlled variable" or in Fred's case "target variable"). This is one peculiarity of PCT view: the subject gives feedback to the environment (about how it should be). In humanistic-cognitive tradition the subject gets feedback from the environment about how the plans of the subject realize.
So for me it reminds more about TOTE type of models than PCT type to call the line from target variable to subject "feedback path". I would rather call it e.g. "information path".
However, if we stress the idea of closed loop and control of perception, then we should say that the subjects gives feedback to its own perception how it should be. According to this idea the whole chain of effects from the output function to the input function is the feedback path. It has two parts: first the output path ("solution path") i.e. chain of effects from the output function to the target variable (or CEV) and second the input path ("information path") i.e. the chain of effects from the target variable to the input function. BOTH of these paths can be either simple or complex. To get the perception of the value of the target variable you may have to use many kind of methods, instruments, surveys, snoopers, spies, reports etc.
Rick in [Rick Marken 2019-01-17_12:08:53] noted that "it's the line going from the intermediate variables to perceptual input that make no sense". I somewhat understand his point but I think that your diagram is a combination of more than one control loops which are nested. You control for the target variable but to do that you have to first control for an accessible variable. You have a perception of the type of the filing system and you have a reference for a different perception. Those connecting variables are not accessible for you to affect them but they can be accessible for you to perceive them. If so then you probably have references for them, too, and then the line from them to you perception makes sense. Some of them might be hard or impossible to perceive (otherwise than via the changes in the target variable) and then the line does not make sense.
Eetu
Well, if you can find time, take a look at the attached and let me
know if the example better matches the diagram.
If I may make a suggestion, you could use the coffee example all the way through, rather than the complex management filing problem. You can't fill the coffee cup because there is no coffee ready. You don't know how the coffee maker works (or coffee is supplied by the canteen on request), so you ask someone to make it (or supply it). Disturbances to that process of getting coffee supplied ready to pour might include the provider getting involved in unrelated conversation, or coffee grounds having run out and that person asking an errand boy to go to the store-room and get some, etc. etc. In the end, your achievement path includes coffee ready to pour, and the error in the target variable is corrected when the cup is full.
Does this describe what you want to get across? I got the gist, but not the details of your "load rate" example. Maybe your intended audience are more familiar with that environment and will now immediately what you are talking about.
Separate comment: In page 3 you mention the "feedback loop" closing the loop, which I think could be made clearer by calling it a "feedback path" or a "feedback connection" rather than "feedback loop".
Martin