I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
Cheers,
Heather
I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
Cheers,
Heather
[Rick Marken 2019-09-19_09:33:54]
Hi HeatherÂ
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
I understand. The robot aside (that was not really the interesting bit to me), I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi HeatherÂ
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.Â
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.Â
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
As another point of interest, has anyone ever written a thorough comparison on a PID and PCT control systems? I spoke briefly about it with Rupert in Chicago, but I would like to better understand specifically how they differ. Yes, controlling output vs. input… but if you had a PCT and PID controller side by side, what would the structural and mathematical differences be? Importantly, is there a test you could do that would differentiate them from one-another if you didn’t know which was which?
Cheers,
Heather
Cheers,
Heather
On Thu, Sep 19, 2019, 08:33 Heather Broccard-Bell hebell@ucsd.edu wrote:
I understand. The robot aside (that was not really the interesting bit to me), I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi HeatherÂ
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.Â
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.Â
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
[Rick Marken 2019-09-19_12:34:38]
HB: I understand. The robot aside (that was not really the interesting bit to me),
 RM: Well, that certainly explains a lot about why no one is interested in my stuff;-)
HB: I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
RM: I don’t think there would be much difference since, as I understand it, the main challenge in developing the cellular control loop was in having the functional components of the loop use cellular components that were known to have the appropriate functional properties.Â
RM: PCT is just control theory so there is no difference between a PCT and any other control system. PCT controllers can be integral, proportional or differential or any combination thereof. What is unique about PCT is the recognition that the behavior of all control systems is organized around the control of perceptual input variables. This is not particularly important to engineers who are building systems to control particular variables. But it is crucial to understanding the behavior of living systems because what they are seen to be doing depends very much on what perceptual variable(s) they are controlling.
RM: So I suppose one important way a PCT approach to designing a cellular control loop would differ from what is described in the article would happen before the designing even started; it would involve figuring out what variable(s) the cellular control system is actually controlling. And it would also be cognizant of the possibility that the variable(s) being controlled are being controlled by a hierarchical control process. As described in the “Non-adaptive adaption” chapter of LCS III, hierarchical control of different perceptions using proportional and integral control systems can look like non-hierarchical control with either integral or proportional controllers, depending on the circumstances (spectral properties of the disturbance, for example).
RM: Also, PCT would be less excited about finding a cell model that controls than in finding one that controls in the way that the cells do. PCT is about fitting models to data; not about getting models to just work.
Best
Rick
On Thu, Sep 19, 2019 at 11:33 AM Heather Broccard-Bell hebell@ucsd.edu wrote:
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi HeatherÂ
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.Â
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.Â
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
[Bruce Nevin (20190919.13:05 ET)]
Search for [Martin Taylor 2018.08.14.23.02] in the archive, or more broadly for the two subject headings
PID v PCT
PID vs. PCT
On Thu, Sep 19, 2019 at 12:41 PM Richard Marken csgnet@lists.illinois.edu wrote:
[Rick Marken 2019-09-19_12:34:38]
On Thu, Sep 19, 2019 at 11:33 AM Heather Broccard-Bell hebell@ucsd.edu wrote:
HB: I understand. The robot aside (that was not really the interesting bit to me),
 RM: Well, that certainly explains a lot about why no one is interested in my stuff;-)
HB: I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
RM: I don’t think there would be much difference since, as I understand it, the main challenge in developing the cellular control loop was in having the functional components of the loop use cellular components that were known to have the appropriate functional properties.Â
RM: PCT is just control theory so there is no difference between a PCT and any other control system. PCT controllers can be integral, proportional or differential or any combination thereof. What is unique about PCT is the recognition that the behavior of all control systems is organized around the control of perceptual input variables. This is not particularly important to engineers who are building systems to control particular variables. But it is crucial to understanding the behavior of living systems because what they are seen to be doing depends very much on what perceptual variable(s) they are controlling.
RM: So I suppose one important way a PCT approach to designing a cellular control loop would differ from what is described in the article would happen before the designing even started; it would involve figuring out what variable(s) the cellular control system is actually controlling. And it would also be cognizant of the possibility that the variable(s) being controlled are being controlled by a hierarchical control process. As described in the “Non-adaptive adaption” chapter of LCS III, hierarchical control of different perceptions using proportional and integral control systems can look like non-hierarchical control with either integral or proportional controllers, depending on the circumstances (spectral properties of the disturbance, for example).
RM: Also, PCT would be less excited about finding a cell model that controls than in finding one that controls in the way that the cells do. PCT is about fitting models to data; not about getting models to just work.
Best
Rick
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi HeatherÂ
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.Â
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.Â
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
[Bruce Nevin (20190919.13:20 ET)]
BTW, when we’re all using Discourse what we’ve said previously on a given topic, such as PID controllers vs. PCT, will be immediately accessible under the appropriate category and topic. We won’t be having people asking the same questions and re-hashing the same discussions quite so laboriously. That’s a big reason why we’re moving.
/Bruce
On Thu, Sep 19, 2019 at 1:10 PM Bruce Nevin bnhpct@gmail.com wrote:
[Bruce Nevin (20190919.13:05 ET)]
Search for [Martin Taylor 2018.08.14.23.02] in the archive, or more broadly for the two subject headings
PID v PCT
PID vs. PCT
On Thu, Sep 19, 2019 at 12:41 PM Richard Marken csgnet@lists.illinois.edu wrote:
[Rick Marken 2019-09-19_12:34:38]
On Thu, Sep 19, 2019 at 11:33 AM Heather Broccard-Bell hebell@ucsd.edu wrote:
HB: I understand. The robot aside (that was not really the interesting bit to me),
 RM: Well, that certainly explains a lot about why no one is interested in my stuff;-)
HB: I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
RM: I don’t think there would be much difference since, as I understand it, the main challenge in developing the cellular control loop was in having the functional components of the loop use cellular components that were known to have the appropriate functional properties.Â
RM: PCT is just control theory so there is no difference between a PCT and any other control system. PCT controllers can be integral, proportional or differential or any combination thereof. What is unique about PCT is the recognition that the behavior of all control systems is organized around the control of perceptual input variables. This is not particularly important to engineers who are building systems to control particular variables. But it is crucial to understanding the behavior of living systems because what they are seen to be doing depends very much on what perceptual variable(s) they are controlling.
RM: So I suppose one important way a PCT approach to designing a cellular control loop would differ from what is described in the article would happen before the designing even started; it would involve figuring out what variable(s) the cellular control system is actually controlling. And it would also be cognizant of the possibility that the variable(s) being controlled are being controlled by a hierarchical control process. As described in the “Non-adaptive adaption” chapter of LCS III, hierarchical control of different perceptions using proportional and integral control systems can look like non-hierarchical control with either integral or proportional controllers, depending on the circumstances (spectral properties of the disturbance, for example).
RM: Also, PCT would be less excited about finding a cell model that controls than in finding one that controls in the way that the cells do. PCT is about fitting models to data; not about getting models to just work.
Best
Rick
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi HeatherÂ
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.Â
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.Â
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
[Rick Marken 2019-09-19_12:54:24]
HB: As another point of interest, has anyone ever written a thorough comparison on a PID and PCT control systems?Â
RM: That’s like comparing apples to fruit. PCT control systems are like the fruit and they exist as PID, integral, bang-bang, etc. But the “Non-adaptive Adaptation” chapter comes close to being a comparison of a PID version of a control system to another kind of control system (hierarchical).
Â
HB: I spoke briefly about it with Rupert in Chicago, but I would like to better understand specifically how they differ. Yes, controlling output vs. input… but if you had a PCT and PID controller side by side, what would the structural and mathematical differences be?
 RM: Again, it is kind of a nonsensical comparison since there can be all kinds of output functions in a PCT controller.Â
HB:Â Importantly, is there a test you could do that would differentiate them from one-another if you didn’t know which was which?
RM: The “Non-adaptive adaptation” chapter shows a way to do it. But looking at different kindsof output functions is just not the way to go in the study of living control system. The difference in the behavior of a control system produced by different output functions is trivial compared to the difference in the behavior of the system produced when the system is controlling different perceptual variables. Look at the difference in the behavior of a system controlling the perimeter versus the area of a rectangle (https://www.mindreadings.com/ControlDemo/Size.html). This difference is produce by control systems with the SAME integral output function.Â
RM: It’s the input, not the output, that matters when studying biological systems.
Best
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Ok, this, perhaps, after so much time, starts to make sense. Because since Serge introduced me to Powers eons ago, I’ve always had this hangup that if PCT were something truly different / better than standard control theory, why does it seem to be the case that no control systems engineers have looked at PCT and been like, "ya, that’s a way better way." Because at least some have presumably seen it by now. But, not being a control systems engineer myself, it was really beyond my mathematical ability to work it out on my own. So, what you are saying is that they are effectively mathematically equivalent, it’s just where one chooses to focus one’s attention when understanding what is going on that is different.
I never had an issue with the internal locus for the controlled perception in a living system. Obviously, unlike in the human engineered system, what is actually being controlled can only be guessed at (and tested using TCV). But even if you identify something you think is being controlled, as you mentioned before, you still have a potential third variable problem (and I think you always have that problem). And even with PCT-informed models, you still cannot avoid that fundamental modeling problem (indeed, fundamental science problem) of infinite realizability: any number of model configurations can replicate the same function, at least some of the time (of course, the solution then is to test under widely different conditions).
But I digress. Thanks again!
Cheers,
Heather
On Thu, Sep 19, 2019, 09:41 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_12:34:38]
On Thu, Sep 19, 2019 at 11:33 AM Heather Broccard-Bell hebell@ucsd.edu wrote:
HB: I understand. The robot aside (that was not really the interesting bit to me),
 RM: Well, that certainly explains a lot about why no one is interested in my stuff;-)
HB: I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
RM: I don’t think there would be much difference since, as I understand it, the main challenge in developing the cellular control loop was in having the functional components of the loop use cellular components that were known to have the appropriate functional properties.Â
RM: PCT is just control theory so there is no difference between a PCT and any other control system. PCT controllers can be integral, proportional or differential or any combination thereof. What is unique about PCT is the recognition that the behavior of all control systems is organized around the control of perceptual input variables. This is not particularly important to engineers who are building systems to control particular variables. But it is crucial to understanding the behavior of living systems because what they are seen to be doing depends very much on what perceptual variable(s) they are controlling.
RM: So I suppose one important way a PCT approach to designing a cellular control loop would differ from what is described in the article would happen before the designing even started; it would involve figuring out what variable(s) the cellular control system is actually controlling. And it would also be cognizant of the possibility that the variable(s) being controlled are being controlled by a hierarchical control process. As described in the “Non-adaptive adaption” chapter of LCS III, hierarchical control of different perceptions using proportional and integral control systems can look like non-hierarchical control with either integral or proportional controllers, depending on the circumstances (spectral properties of the disturbance, for example).
RM: Also, PCT would be less excited about finding a cell model that controls than in finding one that controls in the way that the cells do. PCT is about fitting models to data; not about getting models to just work.
Best
Rick
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi HeatherÂ
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.Â
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.Â
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
I look forward to the new format!
On Thu, Sep 19, 2019, 10:23 Bruce Nevin bnhpct@gmail.com wrote:
[Bruce Nevin (20190919.13:20 ET)]
BTW, when we’re all using Discourse what we’ve said previously on a given topic, such as PID controllers vs. PCT, will be immediately accessible under the appropriate category and topic. We won’t be having people asking the same questions and re-hashing the same discussions quite so laboriously. That’s a big reason why we’re moving.
/Bruce
On Thu, Sep 19, 2019 at 1:10 PM Bruce Nevin bnhpct@gmail.com wrote:
[Bruce Nevin (20190919.13:05 ET)]
Search for [Martin Taylor 2018.08.14.23.02] in the archive, or more broadly for the two subject headings
PID v PCT
PID vs. PCT
On Thu, Sep 19, 2019 at 12:41 PM Richard Marken csgnet@lists.illinois.edu wrote:
[Rick Marken 2019-09-19_12:34:38]
On Thu, Sep 19, 2019 at 11:33 AM Heather Broccard-Bell hebell@ucsd.edu wrote:
HB: I understand. The robot aside (that was not really the interesting bit to me),
 RM: Well, that certainly explains a lot about why no one is interested in my stuff;-)
HB: I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
RM: I don’t think there would be much difference since, as I understand it, the main challenge in developing the cellular control loop was in having the functional components of the loop use cellular components that were known to have the appropriate functional properties.Â
RM: PCT is just control theory so there is no difference between a PCT and any other control system. PCT controllers can be integral, proportional or differential or any combination thereof. What is unique about PCT is the recognition that the behavior of all control systems is organized around the control of perceptual input variables. This is not particularly important to engineers who are building systems to control particular variables. But it is crucial to understanding the behavior of living systems because what they are seen to be doing depends very much on what perceptual variable(s) they are controlling.
RM: So I suppose one important way a PCT approach to designing a cellular control loop would differ from what is described in the article would happen before the designing even started; it would involve figuring out what variable(s) the cellular control system is actually controlling. And it would also be cognizant of the possibility that the variable(s) being controlled are being controlled by a hierarchical control process. As described in the “Non-adaptive adaption” chapter of LCS III, hierarchical control of different perceptions using proportional and integral control systems can look like non-hierarchical control with either integral or proportional controllers, depending on the circumstances (spectral properties of the disturbance, for example).
RM: Also, PCT would be less excited about finding a cell model that controls than in finding one that controls in the way that the cells do. PCT is about fitting models to data; not about getting models to just work.
Best
Rick
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi HeatherÂ
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.Â
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.Â
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Yes indeed, this completely makes sense now… and my question really was whether they were really different kinds of things, because it’s never seemed to me that they really were – but I’ve been led to believe, probably largely through my own misinterpretations of things, that PCT was somehow wholly different from what mainstream control theory is about…
On Thu, Sep 19, 2019, 10:43 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_12:54:24]
On Thu, Sep 19, 2019 at 11:45 AM Heather Broccard-Bell hebell@ucsd.edu wrote:
HB: As another point of interest, has anyone ever written a thorough comparison on a PID and PCT control systems?Â
RM: That’s like comparing apples to fruit. PCT control systems are like the fruit and they exist as PID, integral, bang-bang, etc. But the “Non-adaptive Adaptation” chapter comes close to being a comparison of a PID version of a control system to another kind of control system (hierarchical).
Â
HB: I spoke briefly about it with Rupert in Chicago, but I would like to better understand specifically how they differ. Yes, controlling output vs. input… but if you had a PCT and PID controller side by side, what would the structural and mathematical differences be?
 RM: Again, it is kind of a nonsensical comparison since there can be all kinds of output functions in a PCT controller.Â
HB:Â Importantly, is there a test you could do that would differentiate them from one-another if you didn’t know which was which?
RM: The “Non-adaptive adaptation” chapter shows a way to do it. But looking at different kindsof output functions is just not the way to go in the study of living control system. The difference in the behavior of a control system produced by different output functions is trivial compared to the difference in the behavior of the system produced when the system is controlling different perceptual variables. Look at the difference in the behavior of a system controlling the perimeter versus the area of a rectangle (https://www.mindreadings.com/ControlDemo/Size.html). This difference is produce by control systems with the SAME integral output function.Â
RM: It’s the input, not the output, that matters when studying biological systems.
Best
Rick
Cheers,
Heather
Cheers,
Heather
On Thu, Sep 19, 2019, 08:33 Heather Broccard-Bell hebell@ucsd.edu wrote:
I understand. The robot aside (that was not really the interesting bit to me), I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi HeatherÂ
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.Â
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.Â
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Hi Heather…
From: Heather Broccard-Bell (hebell@ucsd.edu via csgnet Mailing List) csgnet@lists.illinois.edu
Sent: Thursday, September 19, 2019 8:15 PM
To: Richard Marken rsmarken@gmail.com
Cc: Discussion of complex adaptive control systems ecacsnet@lists.ecacs.net; csgnet@lists.illinois.edu
Subject: Re: Living control
HBB : Yes indeed, this completely makes sense now… and my question really was whether they were really different kinds of things, because it’s never seemed to me that they really were – but I’ve been led to believe, probably largely through my own misinterpretations of things, that PCT was somehow wholly different from what mainstream control theory is about…
HB : Heather maybe I don’t understand what you are asking but I’ll try to answer.
I think Rick is misleading you as always. He usually makes confussion, becuase he probably wants to prove that his whatever work was done has some value. It hasn’t as he is stll not able to explain how brains function and how behavior is produced.
If you are asking whether we can explain “behavior” of machines in the same way as “behavior” of people then answer is we can’t. Here is why. I’ll borrow explanation from Henry Yin as I think he gave the best description why we can+t compare engineers control theory with PCT.Â
Henry Yin :
4.2. Control of Input. A control system always controls its input, not output [7]. Only perceivable consequences of behavior can be controlled.
According to mainstream engineering control theory, a control system controls its outputs, not its input. This is perhaps the most common fallacy today, both in engineering and in the life sciences [49, 55, 56]. This fallacy, an unfortunate legacy of cybernetics, is the result of imposing the perspective of the observer rather than using the perspective of the organism or controller. The mistake is to assume that what the engineer perceives and records, the “objective� effect of the system, is the output of the system.
HY :
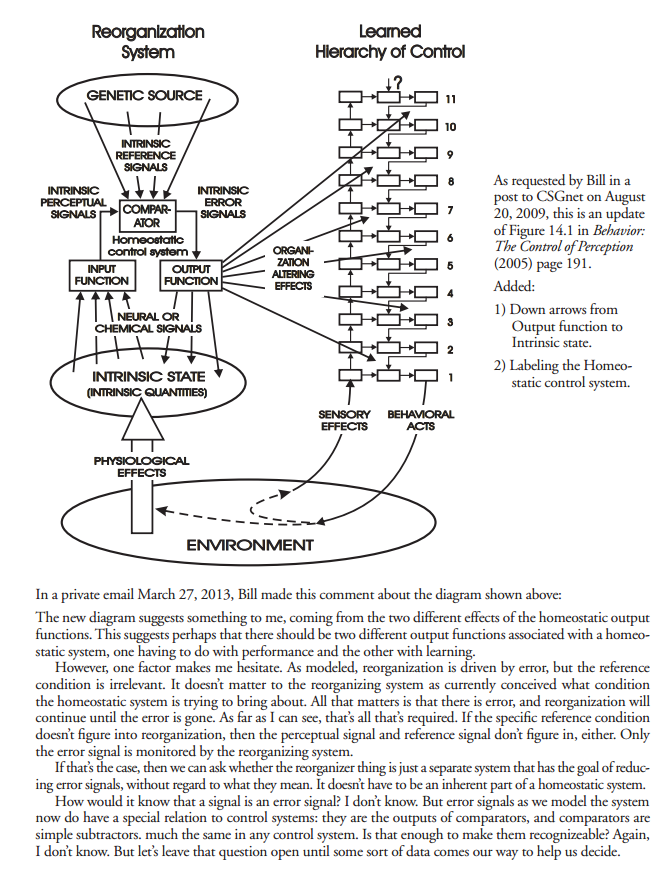
As a result of these conceptual confusions, in traditional models negative feedback is always misunderstood. Placing the comparator outside the organism has the unintended effect of inverting the inside and outside of the system (Figure 5).What should be part of the organism is considered To be a part of the environment, and what should be part of the environment, namely, the feedback function, is considered a part of the organism. Consequently, the equations that describe how forces act on loads and accelerations and decelerations of the loads are assumed to be computed by the nervous system [50]. These conceptual confusions have largely prevented any progress in the study of behavior for many decades.
HB : And if you are asking whether “inteligent electronic machines” can compare to human brain then answer is they can’t yet except that they function on the basis of 0 and 1. That’s the only common property. But I think that modern trend in computer technology is working on bio-chips probably to get some resamblance to brain functioning.
The problem is probably the same as in Living creatures. The more neurons there are in nerv net more functions nervous system can preform. And for now no machine can cope with brain.
This is of course my oppinon about difference between engineers theory and PCT. PCT is about how organsims function and engineers are occupied how machines function. It’s huge difference although article seems to try to equate control functioning of both. Brains are not that simple. That both are using negative feed-back doesn’t mean anything.
But I think that article you presented can help improve diagram of PCT organisms functioning.
I hope I catch the point of your question,
Best regards,
Boris
On Thu, Sep 19, 2019, 10:43 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_12:54:24]
On Thu, Sep 19, 2019 at 11:45 AM Heather Broccard-Bell hebell@ucsd.edu wrote:
HB: As another point of interest, has anyone ever written a thorough comparison on a PID and PCT control systems?
RM: That’s like comparing apples to fruit. PCT control systems are like the fruit and they exist as PID, integral, bang-bang, etc. But the “Non-adaptive Adaptation” chapter comes close to being a comparison of a PID version of a control system to another kind of control system (hierarchical).
HB: I spoke briefly about it with Rupert in Chicago, but I would like to better understand specifically how they differ. Yes, controlling output vs. input… but if you had a PCT and PID controller side by side, what would the structural and mathematical differences be?
RM: Again, it is kind of a nonsensical comparison since there can be all kinds of output functions in a PCT controller.
HB: Importantly, is there a test you could do that would differentiate them from one-another if you didn’t know which was which?
RM: The “Non-adaptive adaptation” chapter shows a way to do it. But looking at different kindsof output functions is just not the way to go in the study of living control system. The difference in the behavior of a control system produced by different output functions is trivial compared to the difference in the behavior of the system produced when the system is controlling different perceptual variables. Look at the difference in the behavior of a system controlling the perimeter versus the area of a rectangle (https://www.mindreadings.com/ControlDemo/Size.html). This difference is produce by control systems with the SAME integral output function.
RM: It’s the input, not the output, that matters when studying biological systems.
Best
Rick
Cheers,
Heather
Cheers,
Heather
On Thu, Sep 19, 2019, 08:33 Heather Broccard-Bell hebell@ucsd.edu wrote:
I understand. The robot aside (that was not really the interesting bit to me), I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi Heather
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
I am curious why you think brains are digital, Boris?
Heather C. Broccard-Bell, Ph.D.
Adjunct Assistant Professor
Department of Psychological Sciences
University of San Diego
Visiting Scholar
The role of noise / variability in complex, adaptive systems
Nieh Honey Bee Lab
Division of Biological Sciences; Section of Ecology, Behavior, and Evolution
University of California San Diego
619.757.4694
Bill certainly didnât and neither do I. Human beings are analog, not discrete.
Fred Nickols
Solution Engineer & Chief Toolmaker
Distance Consulting LLC
âAssistance at A Distanceâ?
www.nickols.us
[Martin Taylor 2019.09.19.16.55]
Actually the answer is that we can and do deal with the behaviour of
machines using the same data and processing as we do in PCT. Boris
is correct in saying that in PCT we don’t do it the way “classical”
control engineers do, because they are trying to make the machine
produce an output specified by the constructor and operator
together, whereas we are usually looking at a machine whose
structure is either too simple to be much concerned with or is
largely unknown to us. Indeed, I personally came to PCT by way of a
practical problem: how we can make it possible to do bi-directional
communication with a computer that could take as input pointing,
typing, and voice recognition. It did not take very long for David
Waugh and I to realize that the other side of the interface could be
a person or a computer, the only difference (in 1983) being that the
computer was much simpler and had fewer capabilities. But the
analysis was the same. We called it “Layered Protocol Theory”, and
when I came across PCT it didn’t take long to recognize that LPT was
a particular application of PCT rather than an independent theory.
When one is interacting with a computer, one knows (we hope) what
one wants the computer to achieve. In other words, the computer,
like a faithful employee, “wants to understand” (= controls for
accurately determining) one’s intentions. Does the user want to add
or multiply these two numbers, for example, or does the user want
the computer perhaps to describe the optimum route for a human
climber to scale a cliff whose geometry and material properties are
in its database. The computer (as yet) does not evolve anything based on maintaining
its intrinsic variables in good condition. Its high-level perceptual
functions or output links that supply reference values down the
hierarchical line may be artificially evolved (reorganized) by the
operator, but that is bringing its performance toward what the
operator wants, not what it wants. In 1983, all our computer could
do related to our interest was to answer queries posed multi-modally
to a database such as () “what is the ()
strength of” () “this” (Speaking) “battalion”. The
obvious problem was how to link all these disparate parts into one
query that had meaning to the computer, “meaning” meaning allowing
it to know the query exactly enough to turn it into SQL and provide
an answer.
That all required what I would now call a second-level perceptual
function. That insight was the start of my protocol hierarchy for
communication between computers, between humans, between humans and
robots, or what have you. It’s the same structure of control whoever
or whatever is communicating with some reciprocal communicator. The
mathematics is the same for all. I suppose one might interpret what is going on in ways other than
the way I interpret the functioning of the protocol structure, just
as Friston’s “Free Energy” system has, so far as I can see, the same
mathematics as PCT, but is interpreted differently as control of
output rather than as control of input. ().
Martin
On 2019/09/19 4:24 PM, “Boris Hartman”
( via csgnet Mailing List) wrote:
If you are asking whether we can explain“behavior” of machines in the same way as “behavior” of people
then answer is we can’t. Here is why. I’ll borrow explanation
from Henry Yin as I think he gave the best description why we
can+t compare engineers control theory with PCT.
SpeakingTypingPointing
For those who were at the Manchester meeting, a "protocol" is
the most complicated PCT-motif I have yet come across. It has 19
interacting controlled perceptions or loops 9 in one communicator
and 10 in the other. The difference between full adult human-human
communication and the almost trivial example of our problem in
1983 is simply in the number of perceptions that an adult human
will (not “may”) control in communication with another adult
human, versus the the few that our query-answering computer could
possibly control (perhaps only 1 to the user’s 10*
Well dear Fred,
you are making the same mistake all the time. You are not acquainted with Bills litearature well. I’m sending you the same answer I sent to Haether. Privatelly. Start reading Bills literature before you answer naybody on CSGnet.
Best regards,
Boris
From: Fred Nickols fwnickols@gmail.com
Sent: Thursday, September 19, 2019 10:47 PM
To: hebell@ucsd.edu
Cc: boris.hartman@masicom.net; csgnet@lists.illinois.edu
Subject: Re: Living control
Bill certainly didn’t and neither do I. Human beings are analog, not discrete.
On Thu, Sep 19, 2019 at 4:39 PM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
I am curious why you think brains are digital, Boris?
On Thu, Sep 19, 2019 at 1:24 PM “Boris Hartman” csgnet@lists.illinois.edu wrote:
Hi Heather…
From: Heather Broccard-Bell (hebell@ucsd.edu via csgnet Mailing List) csgnet@lists.illinois.edu
Sent: Thursday, September 19, 2019 8:15 PM
To: Richard Marken rsmarken@gmail.com
Cc: Discussion of complex adaptive control systems ecacsnet@lists.ecacs.net; csgnet@lists.illinois.edu
Subject: Re: Living control
HBB : Yes indeed, this completely makes sense now… and my question really was whether they were really different kinds of things, because it’s never seemed to me that they really were – but I’ve been led to believe, probably largely through my own misinterpretations of things, that PCT was somehow wholly different from what mainstream control theory is about…
HB : Heather maybe I don’t understand what you are asking but I’ll try to answer.
I think Rick is misleading you as always. He usually makes confussion, becuase he probably wants to prove that his whatever work was done has some value. It hasn’t as he is stll not able to explain how brains function and how behavior is produced.
If you are asking whether we can explain “behavior” of machines in the same way as “behavior” of people then answer is we can’t. Here is why. I’ll borrow explanation from Henry Yin as I think he gave the best description why we can+t compare engineers control theory with PCT.
Henry Yin :
4.2. Control of Input. A control system always controls its input, not output [7]. Only perceivable consequences of behavior can be controlled.
According to mainstream engineering control theory, a control system controls its outputs, not its input. This is perhaps the most common fallacy today, both in engineering and in the life sciences [49, 55, 56]. This fallacy, an unfortunate legacy of cybernetics, is the result of imposing the perspective of the observer rather than using the perspective of the organism or controller. The mistake is to assume that what the engineer perceives and records, the “objective� effect of the system, is the output of the system.
HY :
As a result of these conceptual confusions, in traditional models negative feedback is always misunderstood. Placing the comparator outside the organism has the unintended effect of inverting the inside and outside of the system (Figure 5).What should be part of the organism is considered To be a part of the environment, and what should be part of the environment, namely, the feedback function, is considered a part of the organism. Consequently, the equations that describe how forces act on loads and accelerations and decelerations of the loads are assumed to be computed by the nervous system [50]. These conceptual confusions have largely prevented any progress in the study of behavior for many decades.
HB : And if you are asking whether “inteligent electronic machines” can compare to human brain then answer is they can’t yet except that they function on the basis of 0 and 1. That’s the only common property. But I think that modern trend in computer technology is working on bio-chips probably to get some resamblance to brain functioning.
The problem is probably the same as in Living creatures. The more neurons there are in nerv net more functions nervous system can preform. And for now no machine can cope with brain.
This is of course my oppinon about difference between engineers theory and PCT. PCT is about how organsims function and engineers are occupied how machines function. It’s huge difference although article seems to try to equate control functioning of both. Brains are not that simple. That both are using negative feed-back doesn’t mean anything.
But I think that article you presented can help improve diagram of PCT organisms functioning.
I hope I catch the point of your question,
Best regards,
Boris
On Thu, Sep 19, 2019, 10:43 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_12:54:24]
On Thu, Sep 19, 2019 at 11:45 AM Heather Broccard-Bell hebell@ucsd.edu wrote:
HB: As another point of interest, has anyone ever written a thorough comparison on a PID and PCT control systems?
RM: That’s like comparing apples to fruit. PCT control systems are like the fruit and they exist as PID, integral, bang-bang, etc. But the “Non-adaptive Adaptation” chapter comes close to being a comparison of a PID version of a control system to another kind of control system (hierarchical).
HB: I spoke briefly about it with Rupert in Chicago, but I would like to better understand specifically how they differ. Yes, controlling output vs. input… but if you had a PCT and PID controller side by side, what would the structural and mathematical differences be?
RM: Again, it is kind of a nonsensical comparison since there can be all kinds of output functions in a PCT controller.
HB: Importantly, is there a test you could do that would differentiate them from one-another if you didn’t know which was which?
RM: The “Non-adaptive adaptation” chapter shows a way to do it. But looking at different kindsof output functions is just not the way to go in the study of living control system. The difference in the behavior of a control system produced by different output functions is trivial compared to the difference in the behavior of the system produced when the system is controlling different perceptual variables. Look at the difference in the behavior of a system controlling the perimeter versus the area of a rectangle (https://www.mindreadings.com/ControlDemo/Size.html). This difference is produce by control systems with the SAME integral output function.
RM: It’s the input, not the output, that matters when studying biological systems.
Best
Rick
Cheers,
Heather
Cheers,
Heather
On Thu, Sep 19, 2019, 08:33 Heather Broccard-Bell hebell@ucsd.edu wrote:
I understand. The robot aside (that was not really the interesting bit to me), I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi Heather
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
–
Heather C. Broccard-Bell, Ph.D.
Adjunct Assistant Professor
Department of Psychological Sciences
University of San Diego
Visiting Scholar
The role of noise / variability in complex, adaptive systems
Nieh Honey Bee Lab
Division of Biological Sciences; Section of Ecology, Behavior, and Evolution
University of California San Diego
619.757.4694
–
Fred Nickols
Solution Engineer & Chief Toolmaker
Distance Consulting LLC
“Assistance at A Distance�
www.nickols.us
I am curious why you think brains are digital, Boris?
From: Boris Hartman boris.hartman@masicom.net
Sent: Thursday, September 19, 2019 11:54 PM
To: ‘Heather Broccard-Bell’ hebell@ucsd.edu
Subject: RE: Living control
Heather,
HBB : I am curious why you think brains are digital, Boris?
HB : I didin’t think that before I start reading Bills literature. I knew how nervous system basically function as I had physiology for exam in my studies. And that was long time ago. But when I started to read PCT I realized that Bill connected my physiological knowledge into one big whole of understanding how organisms function including nervous system in some special way.
Like to most of members here on CSGnet, I would advise you to read Bills’ literature. That’s the best way to understand PCT. I’m telling members for years (since Bill left us) to read more and more of his literature. But sadly they don’t read or read what they want to read and understand what they want to understand. Rick is usually citating only himself, Brice Nevin citate physlosophers…
Bills’s literature is not easy to read, because it is supported with many physiological evidences. I assume that Bill was inspired by his work in hospitals and by reading Ashby who was psychitrist. Everything was showing in the direction of what millions of workers in hospitals knew about how organisms functioning and they work with human organsims every day and save lives. So I ddin’t doubt that Bills’ supporting evidences for his PCT theory were right.
But still I had serious problems in the beggining because of his scientific language and it was pure luck that I find writings of Kent McClleland and later Synopsis of Bruce Abbott. With reading literature of all these authors and talking to Martin (when he has spoken normal PCT language and Rick (when he was normal PCT thinker in 2007) I manage to grasp the main point of PCT which I confirmed with serious of experiments. Experiments simply showed that Bills PCT control loop about “human behavior” is inevitably right. It can’t be mistake and it can’t be explained in many ways. It’s only one way how organisms function.
And than Barb wrote once that Bill was very precise with choosing words. I understood immediatelly why is so important to use in main aspects of his theory exactly his terms. Because they are showing exactly how processes in organism function (only one way) and how behavior works. Organisms can not basically work in many ways as psychological theories are about. It can work with processes that are quite precise if you understand them.
So to make it short. You are asking how nervous system function ?
Here I sent the answer directly to Haether because I think she deserves a fair answer in PCT style not in RCT style.
Best regards,
Boris
From: Heather Broccard-Bell hebell@ucsd.edu
Sent: Thursday, September 19, 2019 10:39 PM
To: boris.hartman@masicom.net
Cc: csgnet@lists.illinois.edu
Subject: Re: Living control
On Thu, Sep 19, 2019 at 1:24 PM “Boris Hartman” csgnet@lists.illinois.edu wrote:
Hi Heather…
From: Heather Broccard-Bell (hebell@ucsd.edu via csgnet Mailing List) csgnet@lists.illinois.edu
Sent: Thursday, September 19, 2019 8:15 PM
To: Richard Marken rsmarken@gmail.com
Cc: Discussion of complex adaptive control systems ecacsnet@lists.ecacs.net; csgnet@lists.illinois.edu
Subject: Re: Living control
HBB : Yes indeed, this completely makes sense now… and my question really was whether they were really different kinds of things, because it’s never seemed to me that they really were – but I’ve been led to believe, probably largely through my own misinterpretations of things, that PCT was somehow wholly different from what mainstream control theory is about…
HB : Heather maybe I don’t understand what you are asking but I’ll try to answer.
I think Rick is misleading you as always. He usually makes confussion, becuase he probably wants to prove that his whatever work was done has some value. It hasn’t as he is stll not able to explain how brains function and how behavior is produced.
If you are asking whether we can explain “behavior” of machines in the same way as “behavior” of people then answer is we can’t. Here is why. I’ll borrow explanation from Henry Yin as I think he gave the best description why we can+t compare engineers control theory with PCT.
Henry Yin :
4.2. Control of Input. A control system always controls its input, not output [7]. Only perceivable consequences of behavior can be controlled.
According to mainstream engineering control theory, a control system controls its outputs, not its input. This is perhaps the most common fallacy today, both in engineering and in the life sciences [49, 55, 56]. This fallacy, an unfortunate legacy of cybernetics, is the result of imposing the perspective of the observer rather than using the perspective of the organism or controller. The mistake is to assume that what the engineer perceives and records, the “objective� effect of the system, is the output of the system.
HY :
As a result of these conceptual confusions, in traditional models negative feedback is always misunderstood. Placing the comparator outside the organism has the unintended effect of inverting the inside and outside of the system (Figure 5).What should be part of the organism is considered To be a part of the environment, and what should be part of the environment, namely, the feedback function, is considered a part of the organism. Consequently, the equations that describe how forces act on loads and accelerations and decelerations of the loads are assumed to be computed by the nervous system [50]. These conceptual confusions have largely prevented any progress in the study of behavior for many decades.
HB : And if you are asking whether “inteligent electronic machines” can compare to human brain then answer is they can’t yet except that they function on the basis of 0 and 1. That’s the only common property. But I think that modern trend in computer technology is working on bio-chips probably to get some resamblance to brain functioning.
The problem is probably the same as in Living creatures. The more neurons there are in nerv net more functions nervous system can preform. And for now no machine can cope with brain.
This is of course my oppinon about difference between engineers theory and PCT. PCT is about how organsims function and engineers are occupied how machines function. It’s huge difference although article seems to try to equate control functioning of both. Brains are not that simple. That both are using negative feed-back doesn’t mean anything.
But I think that article you presented can help improve diagram of PCT organisms functioning.
I hope I catch the point of your question,
Best regards,
Boris
On Thu, Sep 19, 2019, 10:43 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_12:54:24]
On Thu, Sep 19, 2019 at 11:45 AM Heather Broccard-Bell hebell@ucsd.edu wrote:
HB: As another point of interest, has anyone ever written a thorough comparison on a PID and PCT control systems?
RM: That’s like comparing apples to fruit. PCT control systems are like the fruit and they exist as PID, integral, bang-bang, etc. But the “Non-adaptive Adaptation” chapter comes close to being a comparison of a PID version of a control system to another kind of control system (hierarchical).
HB: I spoke briefly about it with Rupert in Chicago, but I would like to better understand specifically how they differ. Yes, controlling output vs. input… but if you had a PCT and PID controller side by side, what would the structural and mathematical differences be?
RM: Again, it is kind of a nonsensical comparison since there can be all kinds of output functions in a PCT controller.
HB: Importantly, is there a test you could do that would differentiate them from one-another if you didn’t know which was which?
RM: The “Non-adaptive adaptation” chapter shows a way to do it. But looking at different kindsof output functions is just not the way to go in the study of living control system. The difference in the behavior of a control system produced by different output functions is trivial compared to the difference in the behavior of the system produced when the system is controlling different perceptual variables. Look at the difference in the behavior of a system controlling the perimeter versus the area of a rectangle (https://www.mindreadings.com/ControlDemo/Size.html). This difference is produce by control systems with the SAME integral output function.
RM: It’s the input, not the output, that matters when studying biological systems.
Best
Rick
Cheers,
Heather
Cheers,
Heather
On Thu, Sep 19, 2019, 08:33 Heather Broccard-Bell hebell@ucsd.edu wrote:
I understand. The robot aside (that was not really the interesting bit to me), I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
Cheers,
Heather
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Hi Heather
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Best
Rick
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
–
Heather C. Broccard-Bell, Ph.D.
Adjunct Assistant Professor
Department of Psychological Sciences
University of San Diego
Visiting Scholar
The role of noise / variability in complex, adaptive systems
Nieh Honey Bee Lab
Division of Biological Sciences; Section of Ecology, Behavior, and Evolution
University of California San Diego
619.757.4694
Boris:
The “Target Variable” in my simplified version of PCT refers to the Input Quantity or what some call the "controlled variable."Â It is indeed “outside” and it my perception of it that I control, not the variable itself, although my actions do indeed affect it otherwise my perception of it would not change.
On Thu, Sep 19, 2019 at 6:02 PM “Boris Hartman” csgnet@lists.illinois.edu wrote:
Well dear Fred,
Â
you are making the same mistake all the time. You are not acquainted with Bills litearature well. I’m sending you the same answer I sent to Haether. Privatelly. Start reading Bills literature before you answer naybody on CSGnet.
Â
Best regards,
Â
Boris
Â
Â
Â
From: Fred Nickols fwnickols@gmail.com
Sent: Thursday, September 19, 2019 10:47 PM
To: hebell@ucsd.edu
Cc: boris.hartman@masicom.net; csgnet@lists.illinois.edu
Subject: Re: Living control
Â
Bill certainly didn’t and neither do I. Human beings are analog, not discrete.
Â
On Thu, Sep 19, 2019 at 4:39 PM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
I am curious why you think brains are digital, Boris?
Â
On Thu, Sep 19, 2019 at 1:24 PM “Boris Hartman” csgnet@lists.illinois.edu wrote:
Hi Heather…
Â
From: Heather Broccard-Bell (hebell@ucsd.edu via csgnet Mailing List) csgnet@lists.illinois.edu
Sent: Thursday, September 19, 2019 8:15 PM
To: Richard Marken rsmarken@gmail.com
Cc: Discussion of complex adaptive control systems ecacsnet@lists.ecacs.net; csgnet@lists.illinois.edu
Subject: Re: Living control
Â
HBB : Yes indeed, this completely makes sense now… and my question really was whether they were really different kinds of things, because it’s never seemed to me that they really were – but I’ve been led to believe, probably largely through my own misinterpretations of things, that PCT was somehow wholly different from what mainstream control theory is about…
Â
HB : Heather maybe I don’t understand what you are asking but I’ll try to answer.
Â
I think Rick is misleading you as always. He usually makes confussion, becuase he probably wants to prove that his whatever work was done has some value. It hasn’t as he is stll not able to explain how brains function and how behavior is produced.
Â
If you are asking whether we can explain “behavior” of machines in the same way as “behavior” of people then answer is we can’t. Here is why. I’ll borrow explanation from Henry Yin as I think he gave the best description why we can+t compare engineers control theory with PCT.Â
Â
Henry Yin :
Â
4.2. Control of Input. A control system always controls its input, not output [7]. Only perceivable consequences of behavior can be controlled.
Â
According to mainstream engineering control theory, a control system controls its outputs, not its input. This is perhaps the most common fallacy today, both in engineering and in the life sciences [49, 55, 56]. This fallacy, an unfortunate legacy of cybernetics, is the result of imposing the perspective of the observer rather than using the perspective of the organism or controller. The mistake is to assume that what the engineer perceives and records, the “objective� effect of the system, is the output of the system.
Â
HY :
As a result of these conceptual confusions, in traditional models negative feedback is always misunderstood. Placing the comparator outside the organism has the unintended effect of inverting the inside and outside of the system (Figure 5).What should be part of the organism is considered To be a part of the environment, and what should be part of the environment, namely, the feedback function, is considered a part of the organism. Consequently, the equations that describe how forces act on loads and accelerations and decelerations of the loads are assumed to be computed by the nervous system [50]. These conceptual confusions have largely prevented any progress in the study of behavior for many decades.
Â
Â
HB : And if you are asking whether “inteligent electronic machines” can compare to human brain then answer is they can’t yet except that they function on the basis of 0 and 1. That’s the only common property. But I think that modern trend in computer technology is working on bio-chips probably to get some resamblance to brain functioning.
Â
The problem is probably the same as in Living creatures. The more neurons there are in nerv net more functions nervous system can preform. And for now no machine can cope with brain.
Â
This is of course my oppinon about difference between engineers theory and PCT. PCT is about how organsims function and engineers are occupied how machines function. It’s huge difference although article seems to try to equate control functioning of both. Brains are not that simple. That both are using negative feed-back doesn’t mean anything.
Â
But I think that article you presented can help improve diagram of PCT organisms functioning.
Â
Â
I hope I catch the point of your question,
Â
Best regards,
Â
Boris
Â
Â
Â
Â
Â
Â
Â
Â
Â
On Thu, Sep 19, 2019, 10:43 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_12:54:24]
Â
On Thu, Sep 19, 2019 at 11:45 AM Heather Broccard-Bell hebell@ucsd.edu wrote:
HB: As another point of interest, has anyone ever written a thorough comparison on a PID and PCT control systems?Â
Â
RM: That’s like comparing apples to fruit. PCT control systems are like the fruit and they exist as PID, integral, bang-bang, etc. But the “Non-adaptive Adaptation” chapter comes close to being a comparison of a PID version of a control system to another kind of control system (hierarchical).
Â
HB: I spoke briefly about it with Rupert in Chicago, but I would like to better understand specifically how they differ. Yes, controlling output vs. input… but if you had a PCT and PID controller side by side, what would the structural and mathematical differences be?
Â
 RM: Again, it is kind of a nonsensical comparison since there can be all kinds of output functions in a PCT controller.Â
Â
HB:Â Importantly, is there a test you could do that would differentiate them from one-another if you didn’t know which was which?
Â
RM: The “Non-adaptive adaptation” chapter shows a way to do it. But looking at different kindsof output functions is just not the way to go in the study of living control system. The difference in the behavior of a control system produced by different output functions is trivial compared to the difference in the behavior of the system produced when the system is controlling different perceptual variables. Look at the difference in the behavior of a system controlling the perimeter versus the area of a rectangle (https://www.mindreadings.com/ControlDemo/Size.html). This difference is produce by control systems with the SAME integral output function.Â
Â
RM: It’s the input, not the output, that matters when studying biological systems.
Â
Best
Â
Rick
Â
Â
Â
Â
Cheers,
Heather
Â
Cheers,
Heather
Â
On Thu, Sep 19, 2019, 08:33 Heather Broccard-Bell hebell@ucsd.edu wrote:
I understand. The robot aside (that was not really the interesting bit to me), I am wondering how a PCT approach to designing that cellular control loop would differ from what they’ve done?
Â
Cheers,
Heather
Â
On Thu, Sep 19, 2019, 06:39 Richard Marken rsmarken@gmail.com wrote:
[Rick Marken 2019-09-19_09:33:54]
Â
Hi HeatherÂ
Â
On Thu, Sep 19, 2019 at 6:27 AM Heather Broccard-Bell csgnet@lists.illinois.edu wrote:
HM: I’m curious to hear what everyone thinks about this work:
Â
https://www.quantamagazine.org/math-reveals-the-secrets-of-cells-feedback-circuitry-20190918/
Â
RM: Nice article. But, via it’s focus on the nature of the output function in a control loop. it leaves out that aspect of negative feedback control that is most important for understanding the behavior of biological systems: the fact that what is being controlled in a control loop is a perceptual variable (also called a PERCEPTION). The little lego demo described in the video in the article is a good example of the problem. The article says that the robot is keeping its distance from the target constant, implying that the perception it is controlling (via integral output) is distance. This is possible but it’s also possible that the robot is controlling some other variable that is a correlate of distance, such as reflected sound or light intensity (I built a logo robot that appeared to control its distance from an object by controlling the amplitude of reflected light). It could be (though it’s probably not) controlling a perceptual variable that is even more interesting like the degree of focus of what is written on the paper placed in front of the robot. Such a robot could then be designed to do things based on what is written on the paper, so the robot would have to move to a distance where it gets the right focus so that it knows what to do.Â
Â
RM: Anyway, what I think about this work is that, like all non-PCT applications of control theory to understanding the behavior of biological (living) systems, the focus on behavioral output leads them to miss what is most important about understanding the controlling done by these systems: what variable(s) the system is controlling. This, of course, is what Powers didn’t miss. And, coincidentally, it was the topic of the talk that Richard Kennaway and I gave at the IAPCT meeting last week.Â
Â
RM: So I guess I’d have to say that, from my perspective, the paper is a net negative since it continues to encourage a view of control as a process of producing the appropriate output (in this case, integral output) rather than the intended perceptual input.
Â
Best
Â
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Â
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Â
–
Heather C. Broccard-Bell, Ph.D.
Â
Adjunct Assistant Professor
Department of Psychological Sciences
University of San Diego
Â
Visiting Scholar
The role of noise / variability in complex, adaptive systems
Nieh Honey Bee Lab
Division of Biological Sciences; Section of Ecology, Behavior, and Evolution
University of California San Diego
619.757.4694
–
Fred Nickols
Solution Engineer & Chief Toolmaker
Distance Consulting LLC
“Assistance at A Distance�
www.nickols.us