[Martin Taylor 2016.08.20.17.33]
[Martin Taylor 2016.08.16.13.13]
I don't know why I forgot to include the punch line. Scroll down to
find it, twice.
[From Rick Marken(2016.08.19.2100)]
I suppose that if you ignore the relevant mathematics and say it'sirrelevant when it is presented to you in outline and also when it
is given in excruciating detail, I suppose you could say that. You
shouldn’t, but there you go. Nothing anyone but you can do
anything about it.For the few who still might be interested, here's both overviewand detail approaches rolled into one.
Point 1. No description of shape can depend on anything butmeasures of space. Time and velocity cannot enter into them.
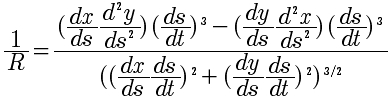
----- detail follows---- There is a mathematical description of curvature in a Euclidean (xvs. y) space. Curvature is defined as 1/R, where R is a radius of
curvature (the radius of an “osculating circle”, the circle
equivalent of a tangent straight line).In the following formulae, "s" means distance along the curve, and(x, y) is a location in the space. the differential ds in terms of
x and y is given by ds = (dx2 + dy2) 1/2
from basic Euclidean geometry. One can do as is done in the
Wikipedia article on Curvature, divide through this equation by ds
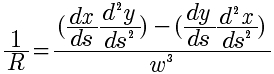
and define an “intermediate variable” or “formal variable” which I
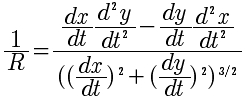
will call “w”. The definition of “w” is The basic expression for curvature (it's based on computing thetangent vector acceleration, which we don’t need to go into. If
you re interested, you could look up the actual derivation) is so we can write ---- end detail----  If we do as Rick does, call the numerator of this fraction "D" andtranspose, we get
w<sup>3</sup> = D*R or w = D<sup>1/3</sup>*R<sup>1/3</sup>
It should be evident that this equation has the form X = X*Y/Y,
because it can be written w = w*R1/3/R1/3
Notice that nothing at all in this derivation has anyrelationship to time or velocity. Those should not and do not
enter into any formula that is purely about the shape of a curve.
And yet we arrive at a formula for “w” that Rick calls a velocity.
Not only that, but Rick claims “w” to be the velocity that the
“power law researchers” measure in their experiments.Point 2. Right at the start of this curious set of exchanges, wepointed out to Rick that he had made a very excusable mistake,
figuring that correcting the mistake would end that particular
discussion, but we were sadly mistaken. The reason that the
mistake is easy to make is that the derivatives in the formula
have been represented in the “dotty” Newtonian notation, and are
often taken to be derivatives with respect to time.----detail follows---- The problem with this is that the formulae do work if you use timederivatives, but they do so if and only if you prespecify a
velocity profile along the track of the curve. You can set V as a
function of t (time) or of s (distance along the curve), because
they convert into each other, but you have to set it before you do
any other manipulations. It can be anything, provided that it
defines a one-to-one mapping between t and s.V(t)<sub>t= t0</sub> = (ds/dt)<sub>t=t0 </sub>or<sub> </sub>V(s)<sub>s=s0</sub> = (ds/dt)<sub>s=s0</sub> If you integrate V(t) after time t0 or V(s) after point s0, youget a mapping of t onto s. For each moment in time there is a
corresponding point along the curve. Those values depends on the
arbitrarily defined V function of t or s, So let’s see (once
again) what we arrive at when we use this arbitrary mapping of t
onto s, starting with the formulae when you take the dot notation
as signifying differentiation with respect to time.The first formula, which defined our intervening variable "w" nowis
 The curvature formula becomes  It is perhaps worth noticing at this point that it would beformally correct to multiply top and bottom by (dt)3 to
avoid having time mentioned in a formula for a description of
space, but we won’t do that because we want to see whether the
formula as written is correct on the assumption that we have
specified a velocity function of either time or distance along the
curve. What we will do is note that in calculus generally, dx/dy =
dx/dzdz/dy and d2x/dy2 = d2x/dz(dz/dy)2 ,
and use these equalities to show that the equation is correct by
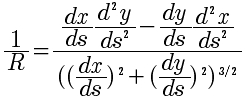
deriving it from the second equation above, the basic formula for
curvature, repeated here.<img alt="" src="cid:part2.96276A58.A501B022@mmtaylor.net" height="98" width="245"> Using the equivalences just mentioned, we can write this as  And cancelling out the ds's we get the formula above <img alt="" src="cid:part5.3DDA0004.2CCE9B17@mmtaylor.net" height="98" width="245"> Q.E.D. Provided we have chosen some arbitrary velocity in advance as afunction of time or space, so that ds/dt has a value, the equation
for curvature with the time derivatives is correct.----end detail--- It is very easy to ignore the requirement to specify an arbitraryV(t) or V(s) and think that the two equations, one for the
velocity and one for the curvature, are independent. That’s
exactly what Rick did when he noticed that the denominator of this
formula is actually V3 . He thought that he could then
do as we did above for the formal variable “w”, which has no
relation to velocity. So we follow Rick and do it here, for V, but
now we do it knowing that we pre-set V. Rick calls the numerator
of the fraction “D”, so the equation becomes1/R = D/V<sup>3</sup> which immediately gives Rick's favourite equation fordetermining(!) the already arbitrarily specified V.
V = D<sup>1/3</sup>*R<sup>1/3</sup> Notice here that V is the same as the "w" variable we foundearlier, except that the equations were based on time derivatives
instead of distance derivatives. They are incorporated in the “D”
variable.
As with the "w" variable, it should be evident that this equation
has the form X = XY/Y, since it can be rewritten as V = VR1/3/R1/3 .
You can’t use the one to find X, and you can’t use the other to find
V.
The equation is true, as is any tautology, but wecan’t use it to determine V because in order to create the
equation we had to create the arbitrary V function before we
started. The equation tautologically has V on both sides, as the
proof of correctness of the time-based formula demonstrates. Alex
pointed this out as soon as Rick introduced this so-called
equation, this tautology, but to no avail.
In other words, none of it, since you continue to claim that thearbitrarily preset variable “V” in the equation above is what
people measure. They don’t. They measure how fast people and other
organisms move along a curving track. Quite a different thing.
Not in the slightest. Itsays that your so-called test is a cheat because it uses
reference trajectories whose speed along the curve is defined by
the power law. When you use real data, as you seem to do below,
you get what Alex and many other have found. And what Alex would
like to have explained.
No, there's no impliedrelationship between the shape and the speed. There may well be
a relationship in practice, as Alex said when he asked the
original question. His question was why this relation is found
in practice when there is no analytically determined reason for
it. One can, in principle, choose to go fast around the sharp
curves and go slow when there is a flat section. Apparently
people don’t usually do that, and I assume that your data
contribute to the mass of evidence that this is so.
That's good. Withoutknowing what you actually calculate, I can’t judge whether these
betas are what is usually computed, but I’ll take your word that
they are. I wonder whether your apparatus had some equivalent of
viscosity?
The problem is that your sine waves are sine waves with as afunction of time. The squiggle shapes have no connection with
time, so your comment (and your spreadsheet and your analysis)
fails to make the connection. You don’t need different
disturbances, you need different disturbance velocities .
As I have suggested several times, there are several easy ways to
do this without changing the shapes of either the target squiggle
or the disturbances. You shouldn’t need any new instructions how
to do it.
Well, you are saying the same thing in different words. Yes youmust, and no you don’t, or haven’t yet.
You have not, so far as I know, ever demonstrated that your modelproduces the power law when the along-track velocity of the target
squiggle does not.
I agree that's what you *should* do. I keep asking you do doit. I don’t mind if you refuse to do it. I do mind that you keep
claiming that you have done it. It confuses the readership, and
I’d prefer that the CSGnet readership were treated to honest PCT
discussions rather than ones that depend on a mathematical
misunderstanding, however easy that misunderstanding is to make.Martin
Martin
···
Martin Taylor 2016.08.19.14.00)–
MT: But where is the velocity? It's thealong-track velocity of the reference squiggle that is
critical, not its shape.
RM: You say it's "critical". Yet the model accounts
for the data without it.
So as the electrified Dylan said to the fan who
yelled “Judas”, “I don’t believe you”.
MT: But I ask forthe Nth time, where is the along-track speed variation
in the reference trace in your spreadsheet?
RM: Where is it in your model? As I said,
there is no need to put an along-track speed variation
in the reference trace into the PCT model in order to
account for the data (power law). The reference trace is
actually a trajectory – variation over time – not
just a shape, by the way. So a regular old PCT model
with fixed or variable reference accounts for all of the
power law data with which I am familiar.
MT: In the one youdistributed, you use a reference track that, by its
construction from x and y variations that are composed
of sine-waves over time, imposes a 1/3 power law on
the cursor velocity.
RM: This
implies that you accept my explanation of the power
law.
RM: Your
statement is also consistent with my explanation
of the power law because it implies that the power
coefficient that is observed in power law studies
depends on the movement pattern (trajectory)
produced.
And, indeed,
it does, as can be seen by pressing the “Scribble”
button over and over (which should work on your
Mac; just the “Data collection” macro doesn’t work
on the Mac) and seeing the different estimates of
beta for the different scribbles in the upper
right corner. Just now I got estimates of beta for
the different scribbles that ranged from .25 to
.38. The average for 10 trials was .31.
MT: Bruce saysthat even the disturbances are made the same way, so
that the output of any decent control system must
conform to the same power law. It’s forced by the
construction, and is not a property of the movement
control system.
RM: It looks to me like you are complaining about the
fact that the model accounts for the data. But maybe
you are saying that somehow the fit to the data is
forced by my choice of disturbances. Perhaps, like
Bruce, you think the use of sine wave disturbances has
something to do with it. So I’d be happy to use
different disturbances; let me know what you would like
me to use. But remember Fourier’s theorem; every
disturbance waveform can be represented as the sum of
sine waves of different phases and frequencies.
MT: To test themodel you MUST use a reference track in which the
along-track velocity is independent of the local
curvature.
RM: No, to test the model you must compare the
model’s behavior to the behavior of the systems whose
behavior you are trying to understand.
If the model doesn't fit the behavior, perhaps it's
because you haven’t done what you say (used a reference
track in which the along-track velocity is independent
of the local curvature). But my model does fit the data
so your emphatic “MUST” is simply not true.
MT: It's easy todo. Here’s anothe method to add to the ones suggested
previously. You could have a “squiggle-like” column
listing some arbitrarily varying local velocity in x
and in y, and integrate that to produce the reference
squiggle. If the cursor speed conforms to the 1/3
power law when the reference speed does not, then you
would really have a significant advance in answering
Alex’s question.
RM: This is not the way I test models. I test models
against actual observations, not against what someone
says should be but hasn’t yet been observed.