Hi Fred,
I’m stil hoping to drink a little glass of wine with you. J
RCT is »Rick Control Theory«.
With all respect,
Boris
···
From: Fred Nickols [mailto:fred@nickols.us]
Sent: Friday, June 24, 2016 3:31 PM
To: csgnet@lists.illinois.edu
Subject: RE: On atenfels and power (was Re: A Favor re the 11 Levels of HPCT)
[From Fred Nickols (2016.06.24.0930 ET)]
What is “RCT�?
Fred Nickols
From: Boris Hartman [mailto:boris.hartman@masicom.net]
Sent: Friday, June 24, 2016 8:26 AM
To: csgnet@lists.illinois.edu
Subject: RE: On atenfels and power (was Re: A Favor re the 11 Levels of HPCT)
I think it’s enough Rick.
Sooner or later you’ll have to decide whether you are behavioral selfregulation theorist or you’ll promote PCT as it’s presented in Bill’s theory.
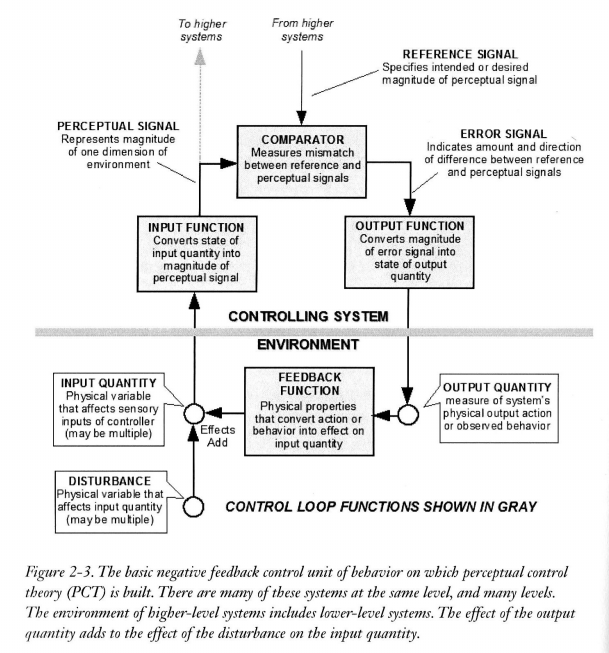
In LCS III you have clear statement that »feed-back« are effects of output on input. There is nothing about output affecting some »controlled variable« in outer environment. It’s not general model although in some cases there can be some variables in outer environment that are affected by output. But they are not controlled.
RM :
I think that the focus of all analysis of behavior based on PCT should be on controlled variables. Once you know what people are controlling – exactly what perceptual aspect of the world they are controlling – then you can predict with accuracy how properties of the physical environment, whether they be considered external disturbances or part of the feedback function, will be related to variations in output and the controlled variable itself.
HB : As I said your RCT model which incorporate »controlled variables« in outer environment suggest that there is always some »controlled aspect« of outer environment, which must be »seen« by an observer so that he can perform TCV.
In our previous discussions we established that this is not what is generally happening. That’s what even you admitt it in your posts here on CSGnet and in your article. Go and read them again (our discussions and your article). So your RCT model with »controlled variable« outside is wrong. But you can make your own theory (RCT) and becaome independent »Control theory« theorist or you can join Carver and othe r self-regulation theorist. Because you are suggesting everything what they do. You have »controlled variable« in outer environment which should be brought into some reference (goal) state like for example you are hammering a nail until you put it into wanted position (reference, goal state).
As we seen that you don’t understand how PCT »organism« on p. 191 in B:CP works (what is not only your »fault«), you are mixing your dreams with reallity what people usually do. If they don’t have enough perceived material or knowledge they suplement the »whole« with imaginaton and so you see what usually people can make from innocent »facts«. I thjink that extreme examples are those who see »UFO« J.
Decide once for all Rick. Whether you stay with PCT diagram or you make your own diagram with »controlled variable« in outside environment if you »think that the focus of all analysis of behavior …should be on controlled variables> which are measured with TCV. We’ve discussed this so many times that I’m tired of repeating it. To human it’s usually enough to tell it once or twice… So what’s gone be…
Best,
Boris
From: Richard Marken [mailto:rsmarken@gmail.com]
Sent: Tuesday, June 14, 2016 4:05 AM
To: csgnet@lists.illinois.edu
Subject: Re: On atenfels and power (was Re: A Favor re the 11 Levels of HPCT)
[From Rick Marken (2016.06.13.1905)
Martin Taylor 2016.06.12.19.55
RM: I did read it. I didn’t see anything in the write up that suggested that atenfel was anything other than an unattractive and unnecessary name for “feedback function”.
MT: If you can’t tell the difference between the road surface of a city block (atenfel) and the time it takes to get across town (feedback function), nothing I write will help you. So I don’t think there’s any point in making any further comment.
RM: I do know the difference between the surface of a road and the time it takes to get across town. But your comment made me realize what my problem was with your ideas about atenfels (and feedback functions). You seem to be saying that there are things out there in the world that are clearly either feedback functions or atenfels. But I don’t think it’s always that clear. For example, you say that the “road surface” is a feedback function. But the “road surface” is just a property of the real world. Its role in controlling depends on what you are controlling. And even then what you call it can be ambiguous.
RM: For example, the surface of the road is the basis of a controlled variable for the people building the road; these people are controlling perceptual aspects of the surface of the road, such as its texture, bank angle, etc. The road surface could also be a disturbance to a variable, such as the perception of the direction of the car, controlled by a person driving a car on the road; changes in the slickness of the road surface are a disturbance to how much change of direction is produced by turning the steering wheel. And, finally, rather than a disturbance, the aspects of the surface of the road could be considered a component of the feedback function connecting the angular forces exerted by the driver on the steering wheel to the amount the car turns.
RM: So dividing up the world into controlled variables, feedback functions, disturbances and atenfels (whatever those are) is not always straightforward. When we study control, what matters is correctly modeling the situation. The most important aspect of this modeling is identifying controlled variables (the aspects of the environment that are under control) and the variables that affect the state of those variables – these are the environmental variables, starting with the forces exerted by the muscles, that connect neural output signals to the controlled variables. So in the example of controlling the direction of the car, one controlled variable, p, is the driver’s view of the angle of the car relative to the road; the output variable, o, is the efferent neural signal sent to the muscles of the arm that turns the wheel. A correct physical model would connect o to p using something like this set of physical relationships:
steering wheel angle = f(o)
car wheel angle = g(steering wheel angle)
car direction = h(wheel angle, road surface friction, tire quality, car speed, wind direction,…)
p = k(car direction, road direction)
RM: You might be able to see that some of the variables in the above equations are functionally disturbances; and you might be able to see that some of the functions are functionally feedback functions. But it’s not always clear at all. For example, is road surface friction a disturbance variable or is it part of the feedback function, h(), that gives the car wheel the purchase required to turn the car? I argue that it doesn’t matter whether you call variables disturbances or part of the feedback function once you have the model right; and it doesn’t matter to the control system itself either. The control system, if properly designed, will vary o so as to nearly perfectly compensate for variations in the variables and functions that influence the state of the controlled variable.
MT: I just ask others who are capable of reading to consider the points made in the tutorial posting. There may well be mistakes and conceptual errors, but they have not been exposed, nor even hinted at, by Rick.
RM: Well, the above is my idea of what I think is the conceptual error of trying to divide up any particular example of controlling into disturbance, feedback function and atanfel. I think that the focus of all analysis of behavior based on PCT should be on controlled variables. Once you know what people are controlling – exactly what perceptual aspect of the world they are controlling – then you can predict with accuracy how properties of the physical environment, whether they be considered external disturbances or part of the feedback function, will be related to variations in output and the controlled variable itself.
Best regards
Rick
–
Richard S. Marken
Author, with Timothy A. Carey, of Controlling People: The Paradoxical Nature of Being Human.