That happens to me all the time; even when I use reply all. I agree; someone should fix it.
···
From: “Bruce Abbott” (bbabbott@frontier.com via csgnet Mailing List) [mailto:csgnet@lists.illinois.edu]
Sent: Friday, February 06, 2015 7:28 AM
To: CSGnet
Subject: FW: Passive Equilibrium Systems and Negative Feedback: A Compromise?
Looks like this went directly to Rick when I intended it for CSGnet.
Someone (Rick, perhaps?) really should investigate why the list server is directing replies to the poster rather than to the list and fix the problem is possible.
Bruce
From: Bruce Abbott [mailto:bbabbott@frontier.com]
Sent: Wednesday, February 04, 2015 1:12 PM
To: ‘rsmarken@gmail.com’
Subject: RE: Passive Equilibrium Systems and Negative Feedback: A Compromise?
[From Bruce Abbott (2015.02.04.1310 EST)]
Rick Marken (2015.02.03.1800)]
Bruce Abbott (2015.02.02.2045 EST) –
BA: Feedback occurs when a change in a variable produces an effect that acts back onto the same variable. In negative feedback, the effect is such as to oppose the change; in positive feedback the effect is such as to exacerbate the change.
BA: With respect to systems such as the spring, pendulum, or ball-in-a-bowl (passive equilibrium systems), a disturbance that displaces the system from its resting state produces a reaction force that opposes the disturbance. As such, these systems meet the formal definition of negative feedback given above
RM: I don’t agree. Hooke’s law is not a feedback equation. But it doesn’t really matter. If you want to call it negative feedback go ahead. I’ll go with it for the sake of argument (or compromise).
BA: Do you agree with my definition of negative feedback?
BA: These systems can be modeled mathematically by applying the laws of physics to derive the appropriate equations of motion – the analytical approach.
BA: These same systems can also be modeled through numerical simulation, in which feedback paths are explicitly included in the calculations – the numerical approach. Except for small errors induceed by computing changes in small discrete time-steps (dt) for what are really continuous changes, the numerical approach yields the same predicted behavior of the system as the analytical approach. This result validates the model, and thus demonstrates that negative feedback is present in these physical systems.
RM: I agree with all that, except for the negative feedback part. But, again, I’ll go with it for the sake of argument.
BA: Now you are denying established fact. Earlier I posted a Simulink diagram that was used to simulate the mass-spring-damper system, and it included two feedback pathways, represented by arrows leading back, with negative sign, to the mass-acceleration variable. Those provide negative feedback proportional to velocity (from the damper) and negative feedback proportional to spring compression. What do you think those arrows are doing there, if not representing negative feedback pathways?
BA: However, a major difference exists between the typical negative feedback models presented on CSGnet and those based on these physical systems. There are no sensors, input functions, signals, and so on transporting effects around a loop from input to output to feedback effect on the input.
RM: Actually, I would say that the major difference between the model of a passive equilibrium system and those of the negative feedback systems discussed on CSGNet is that the latter control; the former don’t.
BA: I didn’t say THE major difference, I said A major difference. Do you agree about the difference in the way that the models have been presented here?
BA: Instead, the forces involved transmit their effects directly to other elements of the system, as when a force applied to a spring compresses the spring, thus directly generating a reaction force in the spring that acts in a direction opposed to the compression of the spring. Although the compression of the spring induces a force opposing the compression, thus meeting the definition of negative feedback given above, the fact that this is accomplished directly through the physical effect of the compressive force on the spring seems to violate the usual picture of negative feedback systems with their sensors and signals and signal transformations and outputs exerting their effects around a loop made up of separate elements. This has led at least one person on this list to conclude that there is no loop involved in these physical systems and therefore, no negative feedback at work there.
RM: OK. This is all fine.
BA: O.K.
BA: My position has been and is that the numerical models with their negative feedback elements are just another way of viewing these physical systems and just as valid as the analytical models. However, for those who may be unwilling to accept this proposition, I have an alternate way to view the problem that you may find acceptable.
RM: I am not unwilling to accept that. I accept that the numerical models are just as valid as the analytical models. What I don’t accept is that what you call the “negative feedback” in these physical systems (like the pendulum and mass on a spring) is responsible for the return to the resting state after a disturbance.
BA: If you accept the numerical model of the mass-spring-damper system, which has explicit negative feedback paths, then it makes no sense for you to assert that these are not responsible for the return of the spring to the resting state. The position feedback produces opposition (a restorative force) to spring compression by the compressive force (causing the mass to decelerate until it comes to rest despite continued application of the compressive force) and accelerates the mass toward the resting position when the compressive force is removed. That acceleration generates inertia that carries the mass past the resting position, stretching the spring and thus reversing the direction of the restorative force, decelerating the mass until it comes to a stop and then accelerates in the opposite direction. This cycle would persist indefinitely except for the second source of negative feedback – the damper. The damper produces a decelerative force proportional to mass velocity. This eventually drains away the energy driving spring oscillation, bringing the mass to rest at its initial, undisturbed position.
BA: What if we view the numerical approach as “saving the appearances� (Angus Jenkinson suggested in his post of January 29th). One could hold that these physical systems do not “really� employ negative feedback, that the appearance of negative feedback in the numerical models is just a fiction that just happens to produce the correct results with respect to system behavior.
RM: If by “correct results” you mean that the mass (or bob) ends up in its resting state after disturbance, then the fiction is that what you are calling negative feedback (in the model or in the analysis) is responsible for this result.
BA: Negative feedback produced by spring tension results in oscillation of the spring AROUND its resting point. Friction proportional to velocity (in this example supplied by the damper) allows the negative feedback supplied by the spring to bring the mass to rest at its resting point.
BA: But then you must still admit (if you’re being honest) that the numerical model behaves “as if� these systems were closed-loop negative feedback systems.
RM: No, they are behaving as open-loop causal systems. If the mass on a spring or pendulum were closed-loop negative feedback systems then the negative feedback would be responsible for the mass (or the bob) returning to (and remaining in) its “resting” position after (and/or during) disturbance.
BA: And you will find that, to “save the appearances,� these systems must have a “loop gain� that is greater than zero but less than or equal to 1.0. Thus, these passive equilibrium systems behave like closed loop, negative feedback systems with loop gains as stated.
RM: Passive equilibrium systems do not behave at all like low gain closed-loop negative feedback systems; they behave like zero gain negative feedback systems. That is a fact that can be established by “the test”. They don’t behave like closed loop negative feedback systems because the “negative feedback” in these systems does not compensate for disturbances; this can be seen from the fact that, without damping, these systems continue to oscillate with constant amplitude (proportional to the magnitude of the disturbance) and never stop. So the disturbance to a passive equilibrium system without damping is completely effective; the effect of the disturbance is exactly what is predicted by open-loop physics.
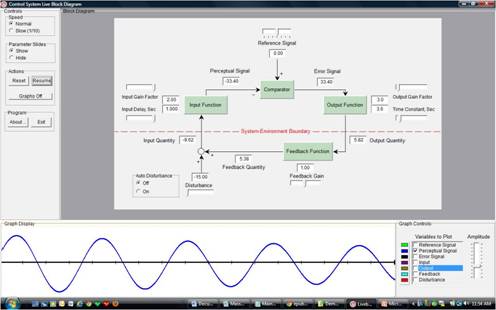
BA: Merely asserting these things as facts does not make them true. See above for an explanation of how these negative feedback systems bring about oscillation and eventually bring the system to rest. Below is a screen-shot showing the behavior of a negative feedback system with certain parameter values. You will note that it is behaving like a damped oscillator (i.e., like a mass-spring-damper system. But since it’s oscillating instead of moving resolutely toward a reference value, it can’t be a negative feedback system (according to the Marken Test for Negative Feedback, that is). That’s a problem for you, because it’s a perfectly ordinary PCT-style proportional control system. Looking at the behavior, you can’t tell it from a mass-spring-damper system.
![Proportional Control Instability.jpg]()
BA: They can be modeled as such, and the results of such models compared to control systems modeled in the same way. Such comparisons can and do illuminate the differences between control systems, with their typically high gains and strong opposition to disturbance, and passive equilibrium systems.
RM: I think that comparison of the behavior of a control system to that of a passive equilibrium system is a great idea! Indeed, I think that’s what I will do to show that the behavior of a damped mass-spring system is not like that of even a low gain control system. I predict that variations in the position of a mass on a spring will be the same when a control system is controlling the mass and and when just the spring is involved only when the gain of the control system is 0 – that is, no loop.
BA: That’s a GREAT idea! After that, you will be forced to concede my position, assuming that you create a valid model (Excel spreadsheet, perhaps?)
BA: Does that sound like a good compromise?
RM: I don’t need to compromise and you are free to do what you like with these passive equilibrium systems. But I’m interested in studying control so equilibrium systems are of interest to me only as components of control systems, like the system that controls arm position.
BA: Some of us can go on viewing these passive equilibrium systems as falling into a very general category of negative feedback systems that includes both the traditional sensors-signals-outputs loop structure and physical systems whose elements interact more directly, while others can go on viewing (incorrectly, I believe) negative feedback systems as properly including only the former type.
RM: Of course you can. I will, however, be trying to write a paper to show that these systems don’t do anything like control; they are just like James’ iron filings; they appear to “achieve goals” (like moving to the magnet) but they are not controlling for getting to the goal; it’s just cause-effect. So for anyone interested in understanding the controlling (purposeful behavior) of living systems, the study of passive equilibrium systems is just a waste of time. I wish I could stop you from wasting your time, but obviously I can’t. But this discussion certainly hasn’t wasted my time. It got me to understand some very basic physics and gave me a great idea for a paper.
BA: The iron filings example is not an equilibrium system. There’s just a force accelerating the filings toward the poles of the magnet. A raindrop running down window is not an equilibrium system. There’s just the force of gravity and a few other forces produced by the characteristics of the glass that determine its path. So whether they appear to “achieve goals� or not is irrelevant to the question of whether passive equilibrium systems are negative feedback systems. You’re confusing these open-loop systems with passive equilibrium systems.
Bruce