[From Bruce Abbott (2015.11.17.1700 EST)]
Fred Nickols (2015.11.17.0937)
Bruce Abbott (2015.11.17.0910 EST)]
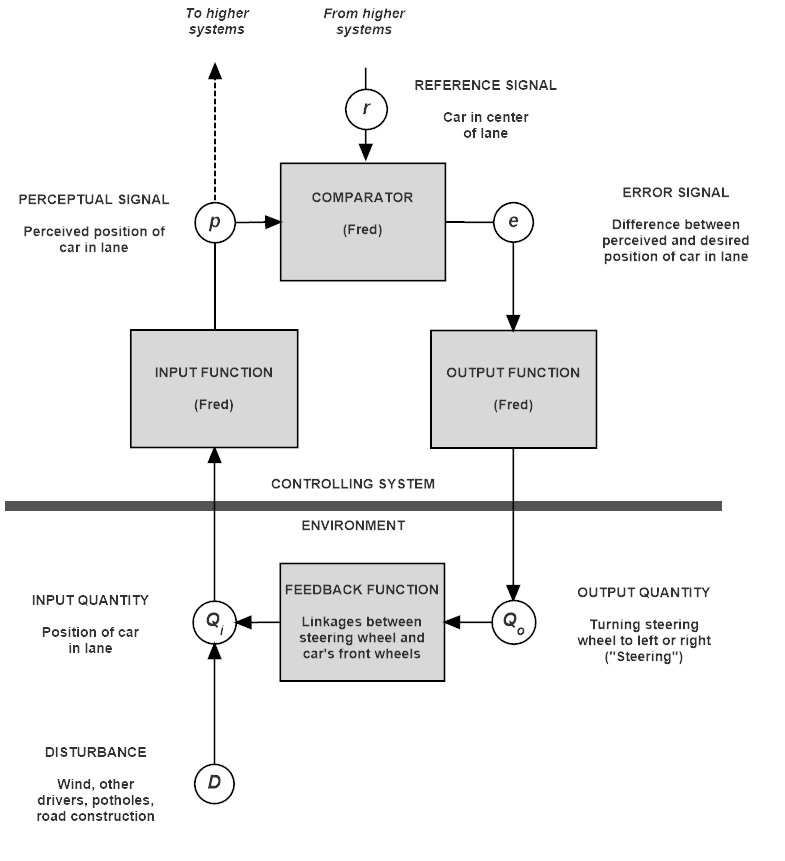
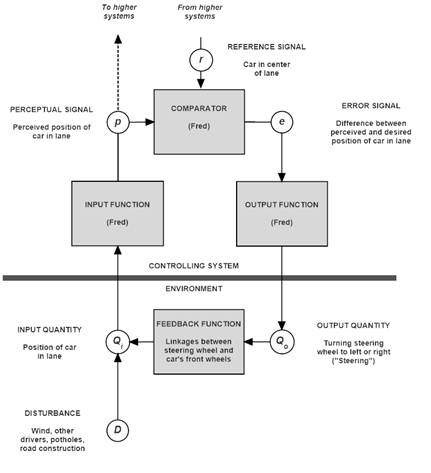
That is true in my own experience, too. But I think it is important to be aware that it is not true of the PCT model we typically use to illustrate PCT: a simple proportional controller. In such a controller, there must be a non-zero error signal to keep the steering wheel angled so as to oppose the crosswind disturbance to the car’s position in the lane. That means that, so long as the crosswind persists, the car’s position in the lane must remain at least a little to the left of the reference position. How much to the left will depend on the loop gain of the control system, with lower gains yielding greater residual error. Because real drivers are able to “zero out” the error, we can conclude that drivers are not implementing a simple proportional controller.
[Fred Nickols] Fascinating! I was a technician in the Navy and I was taught that servomechanisms required an error signal in order to function or they would just sit there. I raised this with Bill on this list once and he said that wasn’t true. Hmm. Oh well.
Well, yes, servomechanisms do “require an error signal in order to function” if by that phrase you mean that changes in output are driven by changes in the error signal. But if “require an error signal in order to function” means that there must be a non-zero error signal in order to have a non-zero output, then the statement is false.
A proportional controller’s output is proportional to the size of the error. If the controlled variable is being acted upon by a constant disturbance, then the only way that such a controller can generate an opposing output is to maintain enough error to produce an opposing output equal to the disturbance. However, an integral controller’s output is proportional to the integral (sum) of the error. A continuous error in a given direction will produce a continually increasing output in a direction opposite that of the disturbance. But as the output increases, it reduces the error, thus reducing the rate at which the integral of the error increases and thus the rate at which the output increases. When the size of the output equals the size of the disturbance, the error is reduced to zero, and the integral of the error remains at its current level; consequently the output remains constant at the value that exactly counteracts the disturbance. So now we have zero error, but a nonzero output.
In bidirectional control systems, errors in the opposite direction summate negatively. If the integral of the error is already positive, the integral will decrease and, if the negative error persists, the integral eventually will become negative. The sign of the output will reverse, restoring the negative feedback relationship. The integral thus introduces a lag in the system’s response to a changing disturbance. A derivative of the error is sometimes added to the output function to reduce this delay.
[Fred Nickols (2015.11.17.0950)]
P.S.
I think a driver can maintain center of lane position despite the crosswind. However, I also believe that is done within some kind of margin of error. In other words, I don’t believe center of lane position can be maintained with no visible, discernible, detectable error. Human beings, unlike computers and some other electronic devices don’t operate anywhere near the speed of light. So to me, center of lane position translates to center of lane plus or minus a bit. A standard generally comes with some tolerances. I think that, for the most part, we human beings operate on a detect and correct basis; we detect an error or the start of a deviation and we correct it.
Excellent observation, Fred. In the example, small deviations from center-lane may not be detectible by the driver, or if detectible, not large enough to bother correcting. (The limits within which errors will produce no response from the control system is sometimes referred to as “dead-band.”) Nevertheless, even if the position of the car is not exactly at the reference value, the driver must bring the heading of the car parallel to the road, as heading errors will accumulate positional error.
Bruce A.