···
From: Alison Powers [mailto:controlsystemsgroupconference@gmail.com]
Sent: Tuesday, June 06, 2017 4:13 AM
To: csgnet@lists.illinois.edu
Subject: RE: PCT Research
AP : I am wondering, Boris, if you are saying in your statement below that it is wrong to think of the controlled variable as outside the organism, in the environment. Are you saying that it is instead inside the mind?
HB : Yes Alison. I’m stating that »controlled variables« are not in outer environment (generally speaking) but in the organism or as you said also in our minds. Generally organisms are not controlling outside but inside. This is not my invention. It’s Bills’ idea that control is done in organism not in outer environment. It’s general definition of control.
Bill P (B:CP):
CONTROL : Achievement and maintenance of a preselected state in the controlling system, through actions on the environment that also cancel the effects of disturbances.
HB : This is one of the main points that can be seen clearly from Bills’ and Marys’ Thesis. Nothing from outside is controlling organism as you also noticed.
Mary Powers :
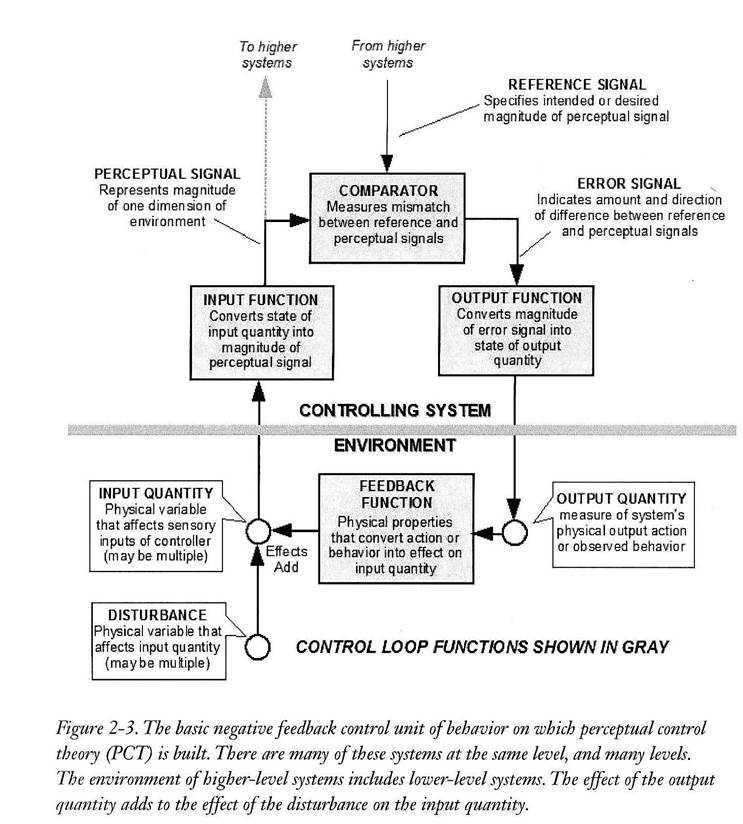
A control system receives input—perceptions—from its environment. Th This input is a combined function of environmental effects plus the effects of its own actions. The input is compared to a reference state, and the difference drives the output, which is immediately and continuously perceived, along with its effect or lack of effect on the environment. The output varies to reduce the difference between input and reference states.
There is nothing controlled in environment what you can clearly see from Bills’ diagram (LCS III).
The only »controlled variable« in PCT is »perceptual signal«in organism, that is controlled in comparator. There are no traces of »controled variables« in environment in any of Bills’ diagram. General PCT model doesn’t have any »controlled variable« in the environment. It’s pure Ricks’ invention.in his RCT (Ricks’ Control Theory).Â
![cid:image003.jpg@01D23694.7341FD90]()
Show me in diagram where is »controlled variable« ??? This diagram is very sophisticated and it incredibly precisely shows what is happening in control loop and how control looks like in organism. Rick is delibratelly avoiding it, because it’s not supporting his RCT theory. He never backed up his insinuations with Bills’ diagrams because there is no »Controlled variable« in outer environment in diagrams. If somebody understand PCT he will simply use diagram and explain PCT with support of diagram. Isn’t that the right way ?
If you can find any »controlled variable«in outer environment in Bills’ diagrams please show it to me. In Bills  latest diagrams there is even no control in outer environment for ex. LCS III diagram. It’s just »input quantity« which exchanged place with »controlled quantity« that was mentioned sometimes before. But »controlled quantity« is totaly different concept as »controlled variable« in outer environment which is controlled by »output« in RCT.
Bill P :
The Living Control System of this kind must sense the controlled quantity in each dimenssion in which the quantity is to be controlled; this implies the inner model of the quantity in the form of a signal or set of signals…… And finally, the system’ss output must be able to affect the controlled quantity in each dimension that is to be controlled.
HB : There is no control done in outer  environment to achieve some reference state, beccause there is no reference signal outside. It’s only inside. You can find all informations you want about PCT in Bills’ and Mary Powers Thesis. That’s why I put them on CSGnet forum. If Ricks RCT is right he will back up his insinuations with real PCT.
Alison please forgive me. I could explain it in such a way that you could all understand more clear complicated physiological functioning of organism and see where is the problem, as Bills’ language can be very complicated and understanding very aggravated. But I will not. And the only reason is Rick. Sorry. He showed before that he can »steal« information from CSGnet whenever he wants. He is using it in his books. Make CSGnet authors protected and I’ll explain to you whatever you want with all possible arguments I have.
For now you’ll have to help yourself with Bills’ and Marys’ legacy as I did. That’s why I took time to write about Bill and Mary as this is their forum, made for them and it should be dedicated to them, not to Ricks’ RCT.
But beleive me, if you will follow their explanations you will with no doubt come to PCT conclussions not to RCT conclussions as Rick is doing. You are clearly on good way. Your basic understanding of PCT about environmental control is superb. And understanding of human responsability even more.
Best,
Boris
Control is not happening outside but inside. I’m repeating this for a long time.
Henry Yin clearly noticed that if control process is done in environment it must result in some kind of »error«.That is main mistake in engineers thinking today.
And that could mean that control comes into organism. That also means that something that is controlling »controlled variable« outside has to be »Behavior« or »Output«. In most diagrams in Bills’ literature there is no »controlled variable« in envrionment. Thee is »Controlled quantity« but most of the time there is »Input quantity« which consist of effects from output and effects of disturbances. These is represents just amount of quantity of physical variables that enters sensor or »Input function«.
.Â
“In your RCT theory it’s clear that behavior is always controlling »controlled variable«, which is for you always in outer enviromnent”
On Jun 5, 2017 11:51 AM, “Boris Hartman” boris.hartman@masicom.net wrote:
From: Richard Marken [mailto:rsmarken@gmail.com]
Sent: Monday, June 05, 2017 5:50 PM
To: csgnet@lists.illinois.edu
Subject: Re: PCT Research
[From Rick Marken (2017.06.05.0850)]
Eetu Pikkarainen (2017-06-05)–
EP: Rick and Martin
EP: Is my next very simplistic understanding about your dialogue at all on the right track?
RM: Here’s my take on it. I want to carry out the type of research program described in the “Experimental Methods” chapter of B:CP (both editions) and in Powers’ two research oriented papers, “Quantitative analysis of purposive systems” and “A cybernetic model for research in human development”, both of which are reprinted in Living Control Systems I. This research program is aimed at identifying the perceptual variables around which behavior is organized – controlled variables – and developing models of how these variables are controlled.
HB : And here is your fatal mistake There is not a question how thses variable are controlled. In your RCT theory it’s clear that behavior is always controlling »controlled variable«, which is for you always in outer enviromnent and it is introduced into organism through »Controlled Perceptual Variable«. You don’t need to manipulate. Say it straight.
RM I don’t want to speak for Martin in terms of the kind of research program he wants to carry out. But I think it’s pretty clear that the research Martin wants to do doesn’t include the central feature of the PCT-based research program envisioned by Powers – identifying controlled variables.
HB : Bill Powers vision was all right. But yours is not. Your research program has nothing to do with Powers or with litearature you mentioned. I proved it many times even in time when Bill was with us.
It’s your own idea that you have always to control some »controlled variable« in environment with »Control of behavior«. It’s one of the biggest nonsence in history of PCT theory. If not so you just have to show evidences that you are right and I’m wrong.
Best,
Boris
Best
Rick
While Martin wants that PCT research should try to develop a theory about how control of perception generally functions and develops in a real world,
Rick has perhaps a somewhat more limited approach. In those demos I have seen there are typically some two, three or more alternatives i.e. different changing variables from which the test person may choose what she tries to control. Then there is an build in TCV in the demo which resolves (on the basis of the stabilization against the disturbances that the program causes to the variables) which one of the alternatives is actually controlled by the test person (and also how well it is controlled).
Now the “psychological robotics� does perhaps not offer general knowledge especially about the development of control in a real world because the robots are designed but humans.
Then we may know, from design, what are the (build in) alternatives of the robots which they can control. Now I think it is well possible, quit similarly like in those demos, to try to test which alternative variable(s) the robot is currently controlling.
This kind of research can give a new and interesting, simplified description of the phenomenon of control and the idea of the TCV. (And perhaps it could be utilized in developing and beta testing new and better robots.)
Eetu
From: Martin Taylor [mailto:mmt-csg@mmtaylor.net]
Sent: 5. kesäkuuta 2017 0:31
To: csgnet@lists.illinois.edu
Subject: Re: PCT Research
[Martin Taylor 2017.06.04.16.0]
[From Rick Marken (2017.06.04.1330)]
Martin Taylor (2017.06.03.11.56)–
RM: But the post you are responding to was my suggestion about using robots, such as the ones developed by Rupert, to illustrate how to do research aimed at understanding the behavior of controllers: psychrobotics. Since you are interested in PCT research I wonder what you think of this way of demonstrating how to do it?
MT: There’s a problem here, because it is a two-edged sword. Unless the robot has developed its own perceptual functions by reorganization, they have been designed in so that the robot can do a certain list of tasks. If it has reorganized, it will be controlling functions that create perceptions of common patterns in the real world that help it to fulfill its “Prime Directive(s)” (aka Intrinsic Variables), but you won’t have ground truth for your tests.
RM: I don’t get how re-organization relates to this – there is no reorganizing going on in Rupert’s model.
Yes, that was the core of my point. Rupert could design any higher-level perceptual functions he wanted. Because he did, there is no assurance that the controlled perceptions correspond to anything we would say is “out there in the real world”. A reorganizing system is biased toward generating perceptions that help it survive and propagate its design by acting on the real world to control the perceptions it creates. If it has sensors and effectors very like yours, it is likely to create perceptions that you would be able to perceive as if they were in the real world. But if its sensors are not like yours, neither will its perceptions be reorganized to be like yours, and you won’t see in the “real world” what it will.
Since Rupert designed the robot without reorganization, you will have the ground truth you want (but see below for why that might not be strictly true), but you will also know that the possible perceptual functions are ones Rupert could imagine might be useful for the tasks he wanted the robot to achieve. Whether the sensors are like yours or quite different, yours are like Rupert’s.
But let me describe what I had in mind in little more detail.
RM: In section 7 of his paper Rupert gives a verbal description of some of the robot’s behaviors. Here’s his list:
• complete rotation of the unit searching for the highest light value,
• partial rotation to fixate on the light target,
• movmovement towards the target, adjusting the orientation, if away from the target,
• repetition of a sequence of (above three) behaviors,
â• avoidance of obstacles
• recovery from being stuck in deaad-end situations.
The tester must not know this if the demonstration is to mean anything at all. To discover that the robot can act in those ways and no others is a critical part of the test. Once you know these things, you already have a fair guide as to what perceptions are being controlled. It’s by no means perfect, as Rupert showed in (I think) his thesis by referring to the complex observable “behaviours” in the Game of Life. But it’s a big head start.
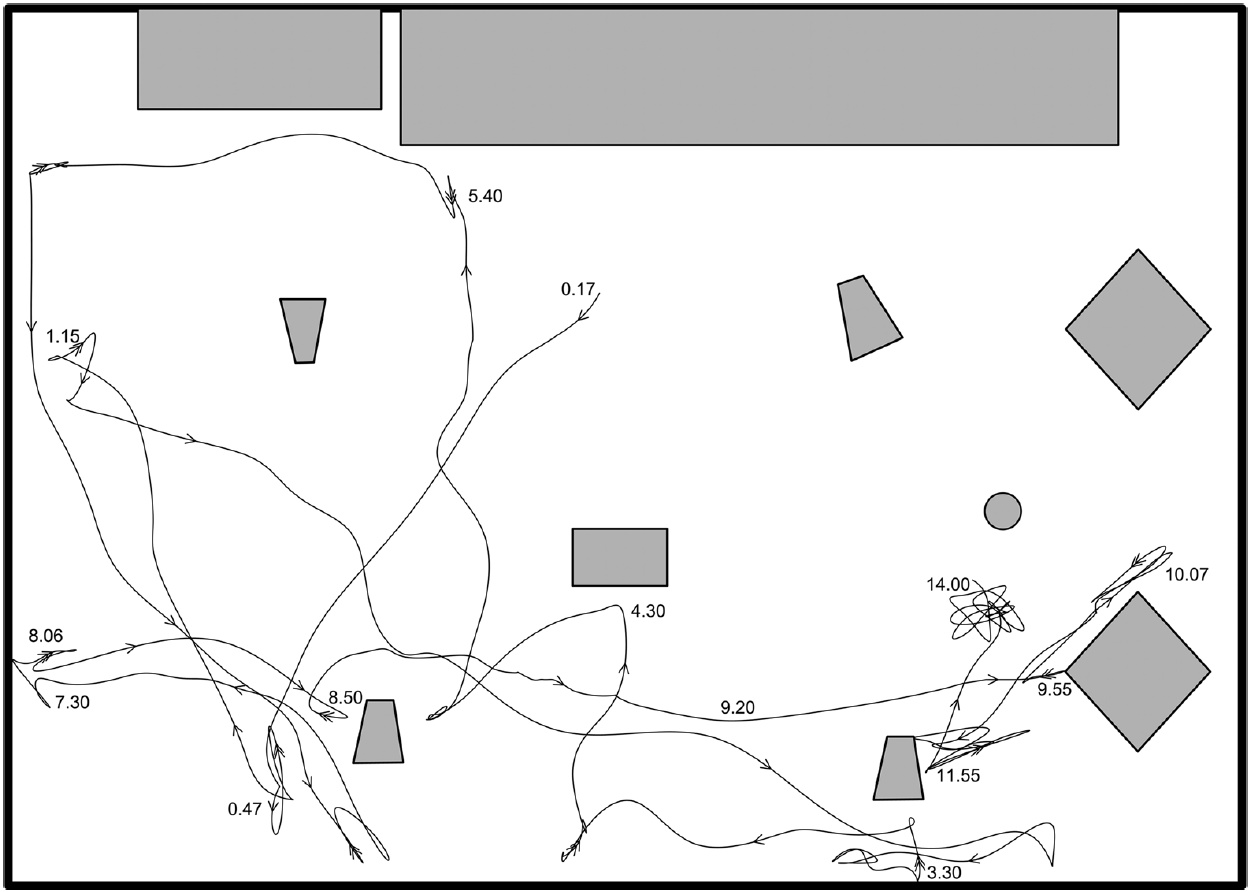
Figure 6, copied below, gives a trace of the movement behavior of the robot during a trial run lasting about 14 minutes.
![Inline image 2]()
RM: The rather complex behavior seen in Figure 6 is produced by a robot that is controlling perceptual variables that are also described verbally in section 7:
• control of perceived light signal, with respect to tthe highest memorized value
• control of the perceived channge in the signal
• control of the perception of a sequencce of lower-level perceptions (more than three),
• control of thee perceived ultrasonic signal
• control of the sum of perceived cchanges of internal values
RM: These variables, which are described more precisely in the Appendix to Rupert’s paper, are the “ground truth” regarding the perceptual variables that the robot is actually controlling; they and the references for their values, are the robot’s “psychology”.
What guarantee do you have that they are the only ones such a robot might be controlling if you don’t have access to Rupert or his designs, but only to the robot?
My proposal, which I will re-christen “psychological robotics”, is to show how one would go about testing to determine what variables the robot is actually controlling.
Yes, that is what I thought. I asked how you would do this when you don’t even know what sensors if might have available to it or what behaviours it may exhibit, given circumstances you may not think of exposing it to.
That is, psychological robotics would be aimed at showing that the complex behavior that we see a robot (a simulated organism) producing is the control of perception.
You can show that easily enough. Rupert has done it. You are talking about doing a functional re-engineering of the robot. There may be other ways of building a perceptual control robot that could do these same things. Would the tests be wrong if they came up with that robot rather than Rupert’s one? Suppose the robot contained a powerful computer than could do all the calculations the “Predictive Control” people would ask for so as to compute the right way to compensate for disturbances in real time? Could anything other than Occam’s razor distinguish the results?
This would be a demonstration of how to find out what control systems – particularly living control systems, like humans – are controlling
MT: Think about Rupert’s robot, and assume you don’t know anything about what it is supposed to be trying to do, but you can see it doing whatever it does. You could see that it had “eyes”, so you might think it would act in some way to changes in light, but would you discover that it had a sense you don’t have (a proximity detector)? Would you know to disturb a sensor you haven’t detected when doing the Test? If you did know all its senses, what would you choose to disturb? There are four levels in the actual design, with eight perceptions being controlled all the time, but you, the tester, don’t know that.
RM: That is, indeed, the research problem and psychological robotics would show how to do this kind of research – research aimed determining the perceptions the robot (qua organism) is controlling.
How would you go about such research? Can you see a way of refining the search space for the possibly controlled perceptions?
MT: Maybe you would guess that with “eyes” it was concerned with light, but would you test whether the light direction mattered, or the intensity, or the variety of colour patterns? Suppose the robot were controlling for finding a zig-zag pattern of red and blue. Would you test whether it had a surface texture sensor or an inclinometer and was controlling for some level of surface smoothness, or looking for a particular gradient? How would you use the TCV for that without having some prior clue that something of the kind was being controlled? Would you guess that you might need to test for some perception you don’t have (such as a combination of light and proximity), that links the inputs of sensors of different kinds?
RM: All good questions that would be answered by the psychological robotics demonstration.
MT: If you actually did find someone to run the TCV with Rupert’s robot who had never seen the design, it would be very interesting if that person could discover all the controlled variables and be able to exclude other possibilities without dissecting the machine.
RM: This kind of demonstration could be done even by people who are very familiar with the perceptual variables that the robot is controlling.
I don’t think so. It would be like hiding a toy behind the sofa and telling the kid “Go find your toy. It’s behind the sofa.” Not a very good demonstration of a technique for discovering what might possibly be controlled and then distinguishing the correct one (or rather the correct eight) from among the set of possibilities.
Rupert could do it himself. The person doing the testing would have to demonstrate that a variable is, indeed, controlled, by showing that it is protected from three or more different disturbances (I remember Bill saying somewhere that you were pretty safe in concluding that a variable is, indeed, under control if you can show that it is protected from at least 3 different disturbances – different variables that should have an effect on the hypothetical controlled variable if it were not under control).
I suppose it depends on what you mean by “different disturbances”. How would you disturb, say, the proximity detector other than by changing the robot’s proximity to walls? But showing that a variable can be controlled is nothing new. “Big Dog” does a pretty good job of correcting for some pretty dramatic disturbances https://www.youtube.com/watch?v=cNZPRsrwumQ. Is it a perceptual control robot?
RM: People who know exactly what perception the robot is actually controlling will likely have an easier time coming up with such a test than will people who know nothing about what the robot is actually controlling (the position we are in when studying actual, living control systems) . But I psychological robotics, even if done by those already familiar with the psychology of the robot under study, would be a great way to show psychologists how to do the new kind of research implied by PCT – research aimed at determining the variables that control systems actually control. I believe that if this kind of research is demonstrated to psychologists in a clear, concrete manner some might be willing to take it up.
That’s a very different issue. If all you want to do is demonstrate that control is happening in relation to perceptions you already know, I doubt that many would be very interested. That’s nothing new. To show that it is being done without any complex computations in the robot is interesting.
Wouldn’t that be terrific and a wonderful way to honor Powers’ legacy? I sure think it would.
Sure, if you could do it without knowing the answers before you start.
Martin
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery