···
Bruce Nevin (2017.11.26.16:59 ET)
BN: A goal is a reference value. The ‘approach’ or ‘avoidance’ part is the relationship between the reference value and the perceptual input, expressed as the error signal, and evidenced to an observer by behavior that reduces the error.Â
RM: Vancouver models it as two control systems, one with an avoidance reference and one with an approach reference to the same variable. Â
BN: In fight/flight the error output goes to two systems, one for combat and the other for escape.
RM: In which case it does neither.
Â
BN: I suppose you could call a flip-flop a choice function. But it’s not choosing between goals, its choosing between means (lower control systems which in turn have their own goals).Â
RM: Show me the functional diagram. I don’t understand how this relates to Bill’s ICT model. To the extent that there is anything that could be called “choice” of lower level control systems in ICT, it’s a choice of reference signals to send to those systems.Â
BN: Interesting that you think the ‘freeze’ option is a perfectly balanced conflict resulting in zero behavioral output, rather than the purposeful output of a control system that has been established by evolution as biological heritage. Could be.Â
RM: In certain situations the freeze option probably is a built in way of controlling for not being seen. I suggested a conflict explanation because we were talking about conflict.Â
Â
BN: I don’t have access to the PDF behind the paywall, but I gather that the prevailing view had been that avoiding noxious things was managed differently from approaching pleasing things. In the conception that Jeff is addressing, an “avoidance goal is an undesired state from which a person seeks to distance themselves.” Apparently, people thought that avoiding something undesirable requires a positive feedback loop, and Jeff demonstrated that this doesn’t work, something that is obvious to us but apparently not to the readers his paper addresses. The abstract states a conclusion: “The findings provide an important step toward theoretical parsimony by demonstrating that avoidance goal regulation, like approach goal regulation, can be understood using a negative feedback control system framework.” PCT accounts for control by means of either approaching or avoiding, depending on the reference level. For us, it’s so obvious, why bother saying it?Â
RM: What I would have preferred is that he had bothered to model it correctly, in terms of ICT.Â
we are implicitly controlling for the sun coming up but you wouldn’t know that was the case until the sun didn’t come up. What this has to do with Jeff’s model is not clear to me at all.
BN: I was responding to what you said about controlling a perception of the age of a predator’s tracks.
The age of a predator’s tracks can’t be a controlled variable (as it is in the single loop example) since the organism can’t control that variable; the organisms can only control its distance from the tracks depending on their age.
BN: I was suggesting that the distinction between recognizing and controlling is not entirely clear all the time.
RM: Sure it is. You can test to determine whether an animal is controlling (or not) for maintaining a distance that is proportional to the age of the tracks. You can also create simulated environments to test to see if people are actually controlling for the sun coming up or not.Â
BN: I can’t say what it has to do with Jeff’s model, because I can’t see the paper. Maybe someone could post the PDF.
RM: I see you saw that Jeff’s paper was posted by Warren. I’d be interested in hearing what you think of it, from an IPT point of view, after you’ve read it.Â
Best
Rick
Â
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
On Sat, Nov 25, 2017 at 4:28 PM, Richard Marken rsmarken@gmail.com wrote:
[From Rick Marken (2017.11.25.1330)]
 Bruce Nevin (2017.11.25.1035)
Rick Marken (2017.11.24.1005)
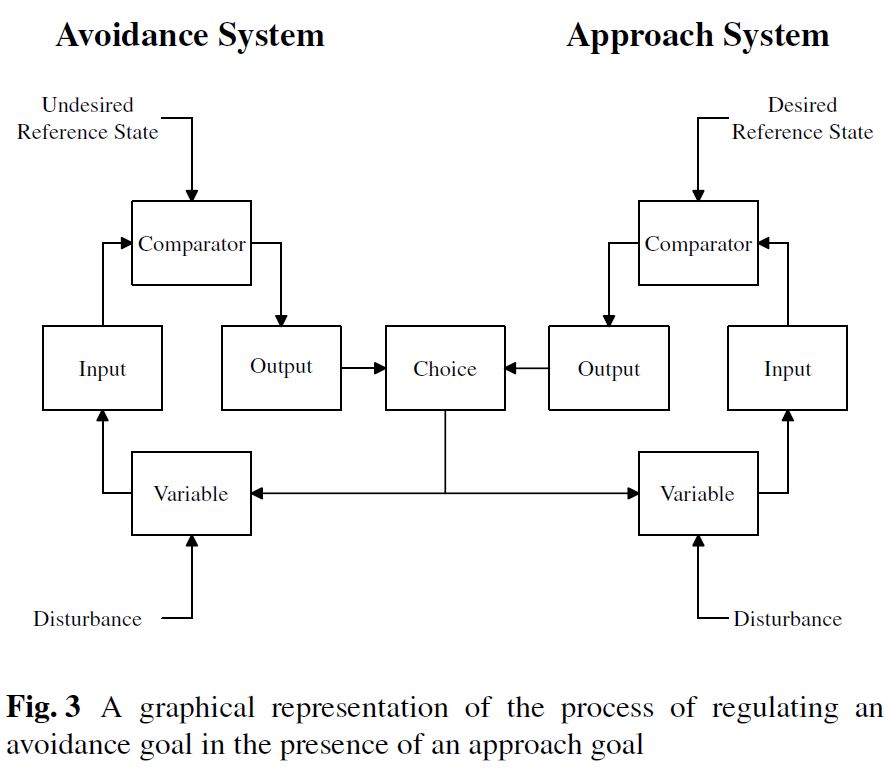
- The paper makes a distinction between avoidance and approach goals but there is no such distinction in PCT, where there are just goals (reference states for controlled variables). 2). There is no “choice” function in PCT (see Figure 3 in Jeff’s paper) that chooses between pursuing an approach versus an avoidance goal and 3) The age of a predator’s tracks can’t be a controlled variable (as it is in the single loop example) since the organism can’t control that variable; the organisms can only control its distance from the tracks depending on their age.Â
BN: (2) Compare the apparent choice of fight, flight, or freeze. They involve the same physiological state, it is said (though it’s hard to reconcile “freeze” with “arousal for action”). All three control a perception of relationship to a predator or other threat (presence zero, distance ‘adequate’…). The difference is in the means of control. The means used is determined at a higher level. At the Program level, an if-then-else contingency is appropriately called a choice.Â
RM: The difference between fight, flight and choice is not in the means of control but in what is controlled (fight involves control of the opponent’s behavior, flight and freeze involve control of distance from the opponent ) and in the reference for what is controlled (flight involves control of distance relative to a reference of being far from the opponent; freeze involves two systems with equal gain controlling for different reference distances from the opponent, one system controlling for moving away and the other controlling for moving closer – perhaps in order to get closer to those headlights) . And the program level in PCT Is assumed to control for a program perception, not to produce a program of output (choice). That is, in PCT, the program level controls for perceiving that “if A, then B else C” is occurring as a perception if the reference is for a perception of "if A, then B else C ". The “choice” component of Jeff’s model is not a program control system; it is an S-R system that responds A if B is true and C otherwise.Â
BN: (3) I remember Bill’s assertion that we control the sunrise, as would be evidenced by our behavior should it fail to occur. I’m not advocating slavish conformity to Bill’s passing comments, just suggesting that the distinction between recognition and control may not always be obvious.
RM:Â I think I know what Bill was talking about when he said that we are controlling for the sunrise. He was saying that we are implicitly controlling for the sun coming up but you wouldn’t know that was the case until the sun didn’t come up. What this has to do with Jeff’s model is not clear to me at all.
BestÂ
RickÂ
Â
/B
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
On Fri, Nov 24, 2017 at 1:17 PM, Richard Marken rsmarken@gmail.com wrote:
[From Rick Marken (2017.11.24.1005)]
On Thu, Nov 16, 2017 at 7:59 AM, Warren Mansell wmansell@gmail.com wrote:
WM: I am circulating a neat new study by Jeff that starts to address Charles Carver’s messing about with ‘control theory’…
RM: I’m sure Jeff’s paper is an improvement over whatever Carver has come up with. But there are several problems with Jeff’s paper – at least from my perspective as one who barely understands PCT so this can be taken as merely the rantings of a crotchety old man -- that make it less than stellar (in my eyes) as an example of a PCT model of control. The problems are: 1) The paper makes a distinction between avoidance and approach goals but there is no such distinction in PCT, where there are just goals (reference states for controlled variables). 2). There is no “choice” function in PCT (see Figure 3 in Jeff’s paper) that chooses between pursuing an approach versus an avoidance goal and 3) The age of a predator’s tracks can’t be a controlled variable (as it is in the single loop example) since the organism can’t control that variable; the organisms can only control it’s distance from the tracks depending on their age.Â
RM: So once again my lack of understanding of PCT (as it is understood on CSGNet anyway) combined with my inability to do mathematics lead me to give the work of a friend of PCT a poor grade. You may all now feel free to set me straight.Â
Best
Rick
Â
Warren
---------- Forwarded message ----------
From: Google Scholar Alerts scholaralerts-noreply@google.com
Date: Thu, Nov 16, 2017 at 5:55 AM
Subject: “powers 1973” - new results
To: wmansell@gmail.com
T Ballard, G Yeo, JB Vancouver, A Neal - Motivation and Emotion
Skip to main content Skip to sections This service is more advanced with
JavaScript available, learn more at http://activatejavascript.org …¦



This Google Scholar Alert is brought to you by Google.
Cancel alert
List my alerts
–
Dr Warren Mansell
Reader in Clinical Psychology
School of Health Sciences
2nd Floor Zochonis Building
University of Manchester
Oxford Road
Manchester M13 9PL
Email: warren.mansell@manchester.ac.uk
Â
Tel: +44 (0) 161 275 8589
Â
Website: http://www.psych-sci.manchester.ac.uk/staff/131406
Â
Advanced notice of a new transdiagnostic therapy manual, authored by Carey, Mansell & Tai - Principles-Based Counselling and Psychotherapy: A Method of Levels Approach
Available Now
Check www.pctweb.org for further information on Perceptual Control Theory
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
–