···
Martin Taylor (2014.12.20.14.28)–
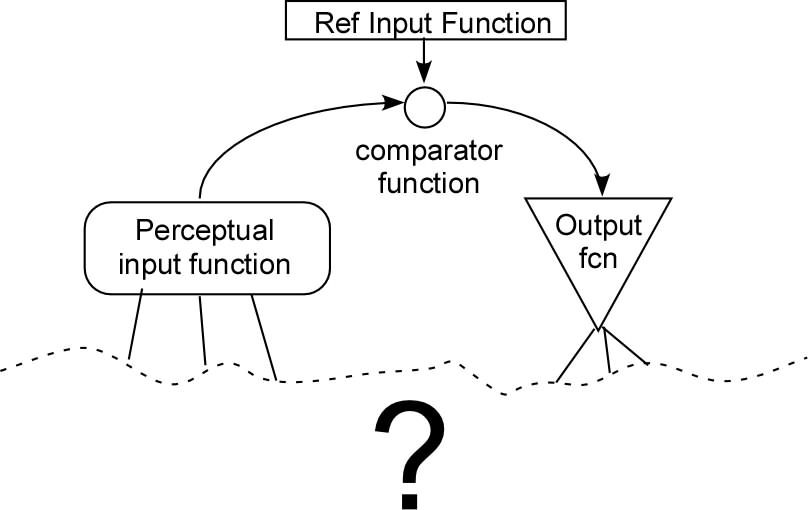
MT: As I read Figure A.1, p = ki*qi, not p = qi.
RM: Yes, that’s because qi is a fiction; there really is no variable qi out there in the environment. Bill created the fiction of qi to simplify the functional analysis of closed loop control in the Appendix of B:CP that contains Figure A-1. By letting qi represent a perceived aspect of the environment it was possible to represent the perceptual input function in the control system analysis as a simple constant, ki. In fact, the perceptual input functions in living systems are much more complex than a constant of proportionality; so ki is also a fiction; a simple constant that stands in for the neural networks that transform the sensory effects of environmental variables, vi, into perceptions of things like colors, objects, relationships, etc.
RM: A better way to represent the perceptual processes assumed by the PCT model (rather than representing them as ki) is the way it’s done in Figure 1 of the Science paper (reprinted on p. 66 of LCS I) where there is no qi in the environment; just environmental variables, vi. The vi are turned into perceptions by the perceptual input function (called the “Sensor Function” in Figure 1 on p. 66).
MT: A long time ago, Korzybski pointed out that the map is not the
territory. Neither is the perception in Ted’s mind of that object
the same as the actual object that Sam picks up.
RM: Korzybski’s view is a very common way of looking at perception but it is quite different from the PCT view. The Korzybski view – which can be called the “representational” view of perception – is that perception is like looking through a glass, darkly. There are presumed to be “objects” out there in the environment which are the “territory” to be represented by perception – the map. The PCT view – which can be called the “constructivist” view of perception – is that perception is a process of constructing perceptions from the sensory effects of physical variables. PCT assumes that there are only physical variables, v.i, out there in the environment-- variables such as pressure variations in the air–and the perceptual functions of the nervous system “construct” perceptions – such as words – out of them.
RM: I think the main difference between the representational and constructivist views of perception is that the former assumes that the environment that is perceived by others is the environment one experiences oneself, as reality, while the latter assumes that the environment perceived by others as well as oneself is the environment described by the current models of physics and chemistry; it is not directly experienced. Put more concretely, a person who takes a representational view of perception sees the cursor and target in a tracking task as objects in the subject’s environment while the person who takes a constructivist view of perception sees the target and cursor as perceptions of the subject’s environment – perceptions that may or may not correspond to the perceptions the subject is experiencing and/or controlling.
RM: In terms of the control diagram in Figure A-1 of B:CP, the person with the representational view of perception will see q.i as an object in the environment, like the target and cursor, that is to be transformed into a perception, p; the person with the constructivist view of perception will see q.i as a fiction representing, not a variable in the environment but, rather, the perception constructed by the subject from variables in the environment.
RM: So in the PCT view of perception there there is only map – only perception. The TCV is a means of testing to determine whether the observer’s map (the observer’s perception of the variable controlled by the system under study) corresponds to perception that the system is actually controlling. When this is true – when the observer is convinced that the variable he perceives is is the one controlled by the subject – then qi – the variable perceived by the observer, corresponds to p, the perception controlled by the subject. So Figure A-1 in B:CP can be seen as representing the situation when the observer’s perception of the controlled variable, q.i, is the same as the perception, p, that the subject is controlling:that is, when q.i = p.
MT: That is the essence of my point. I think you may be getting it. The
observer can see whatever s/he sees, and never can be sure that it
is the CEV corresponding to whatever the subject is controlling. In
the experiment, the subject is ALWAYS controlling the PERCEPTION of
the ring motion, and is controlling it with a constant reference
value. The observer can see the ring motion and might imagine that
it is being controlled, but the observer’s perception of it differs
from the controller’s perception of it. Both look at the same
physical input (so far as that is ever possible), but perceive
different things. If the CV and the CEV are the same, how could that
happen?
RM: It happens when the CEV (q.i in Figure A-1)-- what the observer perceives – is not the same as the variable the subject is perceiving and controlling (the CV or p in Figure A-1).The observer and subject may be looking at the same physical input (the same v.i’s) but, because perception is constructive and not representational, they are perceiving different aspects of that input. Only when observer and subject are constructing the same perception is it true the q.i = p, which is the situation represented in Figure A-1. In real life, q.i = p only when the observer, via the TCV, is convinced that his perception of the variable under control (q.i) is the same as the perception the subject is actually controlling (p).
MT: Why do you change the meaning of the acronym? I have NEVER called
the CEV the “controlled” environmental variable. It is A “Complex”
environmental variable, and I have usually made that explicit when
the term hasn’t been used o CSGnet for a while.
RM: That is better. But calling it an “environmental variable” implies that it is an actual variable in the environment. And q.i is a fiction; there is no q.i in the environment. q.i is a perceptual variable; a construction based on environmental variables: q.i = f(v.i). Same as a controlled perception: p = f(v.i)
MT: That's really far afield. I wouldn't say that it's "out of left
field" so much as “in a ballpark in a different city”.
RM: Well, I would suggest that you consider it as a way of conceiving of things that is more consistent with the PCT model of perception.
Yes, that was my point, wasn't it? The observer is able to see only
the CEV, and unless the observer is careful, something rather like
the “behavioural illusion” happens. Even though the criteria for
control are not apparent to the observer (the reference value or the
error value, plus the transformation of the error into action), the
observer sees the CEV being stabilized and thinks it is being
controlled, much as the prototype behaviourist sees that the
complexity of the organism is shown in the relationship between the
stimulus and the response.
RM: If the observer sees the CEV being stabilized then, by the logic of the TCV, the CEV (the observer’s perception of the CV or q.i) corresponds to the perception the subject is controlling (the CV or p). There is no illusion, unless your view of PCT says that the results of the TCV are somehow illusory. If this were so, then the basic methodology for studying the controlling done by living systems would have to be considered invalid. Is this what you are saying?
MT: What utter nonsense!
RM: Then the TCV is utter nonsense because q.i is the observer’s view of p, the perceptual variable the system is controlling.
MT: But this is far from nonsense. It is correct as far as I can see,
and it illustrates why the TCV can at best approximate the
controlled variable.
RM: Well, that’s reassuring. I don’t know why you don’t consider this nonsense as well but I’ll accept it. I agree that we can probably only get an approximation to the actual controlled variable using the TCV. Figure A-1 assumes that the observer’s view of the controlled variable is exactly the same as the perception controlled by the system: q.i = p. But in actuality, the observer’s view of the controlled variable, q.i, will always be an approximation to p, so that q.i ~ p. But the approximation will be very close.
MT: The CEV does NOT change in the adaptation experiment. The CEV is
always the rotational speed of the ring.
RM: It’s true that the environmental situation doesn’t change – the v.i’s are the same in both the non adapted and adapted case. But the CEV is a function of the environmental environmental situation – a function of the v.i’s – so if you change the function you change the CEV. Your perception of rotational speed is just one way of seeing things. Obviously, the adapted subject is seeing something different;-- a different constructed perception of the physical situation.
RM: When we do the TCV we are basically trying out different definitions of the function that constructs the CEV; we are looking for the function that constructs a CEV that is equivalent to the CV. In the case of the perception of ring rotation, your definition of the CEV is given by your perception of the v.i’s, a perception that is probably constructed from the present time values of the v.i’s. The adapted subject’s definition of the CEV (their CV) is, because of the adaptation, probably based on delayed values of v.i’s. So if you wrote an equation that defined the CEV in terms of appropriately delayed values of the physical variables you would see that this definition of the CEV explains the subject’s controlling nearly perfectly and can, thus, be considered a good approximation to the perception (CV) that the subject is controlling.
MT: : The observer may succumb to
the illusion that the ring speed is being controlled with a varying
reference value, when it is actually being controlled with a
constant reference value of zero, but that’s the observer’s problem.
RM: That would be an observer who is using the representational rather than the constructivist model of perception.
MT: Enough. If you don't want to recognize that the appearance of
control without the appearance of the means of control implies that
the appearance is illusory, a mirage, then I can’t help any more.
RM: What you describe here would be a mistake rather than an illusion. If, using the TCV, you determine that a variable is under control then, in order to show that it is the system under study that is doing the controlling, then you have to show that the control is being exerted by the outputs of the system (that the system has the means of controlling that variable) and that the system can perceive the variable that is under control.
RM: What I don’t recognize as an illusion is when what the observer calls the CEV doesn’t correspond to the perception that is actually being controlled by the system. This is what I thought you were saying was the illusion in your motion adaptation study. You want to call your perception of the ring’s rotation the CEV; you are seeing that this variable is not controlled by the subject so you are saying that the CEV is not the same as the CV. But this is only because you are taking a representational approach to perception. You are treating your definition of the CEV as the reality that the subject is trying to control. The subject is clearly not controlling that variable so you know that the subject is controlling some other perception.
RM: This is not an illusion; it’s just a mistake. You just want to say that ring rotation, as you perceive it, is the CEV – the variable the subject is supposed to be controlling. So you are concluding that the idea that the subject is controlling the ring rotation – your CEV – is an illusion. But it’s an illusion only because you have decided that your perception of ring rotation is what the subject is supposed to be controlling. But the subject is controlling their own perception of ring rotation. There is no illusion for those of us of a constructivist bent; we know that the subject is controlling a different perception than the one you are calling the CEV. It’s a different CEV, one that corresponds to the actually perception (CV) the subject is controlling.
MT: Lord Nelson put the telescope to his blind eye and truthfully told
his Captain “I see no signal” in order to use his plan to win the
Battle of Trafalgar. What battle are you waging by insisting that
what is controlled is not the perceptual signal but something in the
environment?
RM: This has gotten very confused. I am not insisting that what is controlled is not a perceptual signal. I’m insisting that the perception that is controlled is a construction based on physical variables in the environment. An observer using the TCV can “see” this controlled variable by constructing a perception (using their own perceptual system or mathematical tools) that matches the controlled perception constructed by the subject. The perception so constructed by the observer corresponds to q.i in Figure A-1. It will be seen by the observer as being a variable in the subject’s environment. So it’s all perception but it’s possible for an observer to determine what perception the system is controlling by determining which aspect of subject’s environment, as perceived by the observer, corresponds to the perceptual variable the subject is controlling.
MT: What is the likely result if you win?
RM: I’m not trying to win so much as win you over. Your point of view sounds to me like an argument for the invalidity of the TCV as a method of studying living control systems. If it’s not then I have no idea what your point is. To me, the TCV is simply the essential approach to understanding control. And the TCV involves finding a definition of q.i – the controlled variable from the point of view of the observer – that corresponds to p – the controlled variable from the point of view of the control system. You keep saying that q.i and p are separate things and that knowing q.i tells you nothing about p. What I’m hearing you say, then, is that the TCV – which is aimed at finding q.i that corresponds to p – is impossible. That’s kind of a serious claim, from my point of view.
RM: But whether we come to agreement on this or not, I want to thank you again for giving me another good idea for a paper. Powers always said that PCT was based on a “constructivist” view of perception (a la Ernst von Glassersfeld) but I never really saw the importance of understanding what this meant until we got into this discussion. So I think I’ll try to write a paper to explain the difference between the representational view of perception (which I think is the prevailing one in perceptual psychology) and the constructivist view (which, I now see, is at the heart of PCT and really the basis for the TCV).
Best regards
Rick
–
Richard S. Marken, Ph.D.
Author of Doing Research on Purpose.
Now available from Amazon or Barnes & Noble
MT: ...In this case, from the controller's
viewpoint there is only what the analyst would see as
the CV, and from the observer’s viewpoint there is only
what the analyst would see as the CEV. They are not the
same variable.
RM: Actually, they are the same, by definition (per
Figure A-1 in B:CP).
RM: What you (the observer) are measuring in this
experiment is not q.i, the variable the subject is
controlling. In your experiment, because the subject is
adapted and the observer isn’t, the subject is perceiving
and controlling something different than what the observer
is perceiving.
RM: Perhaps your lack of success at getting across the
“fact” that the CEV is NOT controlled comes from calling
the CEV a CEV ( CONTROLLED environmental variable).
RM: However, I think what you might have in mind as a
CEVs is actually the variables called “Physiological
Effects” in Figure 14.1 of B:CP. These Physiological
Effects (also called “Intrinsic Variables”) are, indeed,
uncontrolled consequences of perceptual control.
RM: I meant "same" in the sense of "equivalent". A CV
(p) and what you call a CEV (and said was equivalent to
q.i) are “the same” in the sense that they are
functionally equivalent. For example, the CV and CEV are
“the same” when what the system is controlling is
CV = p = f(v.1,v.2…v.n) (1)
and what the observer sees the system controlling is
CEV = q.i = g(v.1,v.2…v.n) (2)
RM: The ability of an outside observer to determine q.i
is not only not fictional, it is the central contribution
of PCT to understanding the behavior of living control
systems.
PCT shows that an observer can determine the
perception, p, a control system is controlling in terms of
the observer’s own perception, q.i, using The Test for the
Controlled Variable (TCV). Indeed, the aim of the TCV is
for the observer to find a way to perceive (in terms their
own perceptual function g() in equation (2)) what the
system is perceiving and controlling (in terms of its
perceptual function f() in equation (1).) That is, the aim
of the TCV is to find g() that matches f().
RM: Changes in the perceptual function change the CV
and the definition of the CEV (as they do in your motion
adaptation experiment).