[From Kent McClelland (2013.04.17.1530 CDT)]
Matti Kolu (2014.04.16.1245 CET) (2014.04.16.1900 CET)
Thanks Matti, for alerting us to the work of the researchers in the LIMBS Laboratory for Mechanical Engineering at Johns Hopkins University. Here's another forthcoming publication that I found on their website, which suggests to me that these researchers are really beginning to "get it" about the importance of feedback control.
Noah J. Cowan, M. Mert Ankarali, Jonathan P. Dyhr, Manu S. Madhav, Eatai Roth, Shahin Sefati, Simon Sponberg, Sarah A. Stamper, Eric S. Fortune, and Thomas L. Daniel . �Feedback control as a framework for understanding tradeoffs in biology�. arXiv:1402.5702, 2014.
Control theory arose from a need to control synthetic systems.
from regulating steam engines to tuning radios to devices
capable of autonomous movement, it provided a formal
mathematical basis for understanding the role of feedback in
the stability (or change) of dynamical systems. It provides a
framework for understanding any system with feedback regulation,
including biological ones such as regulatory gene networks,
cellular metabolic systems, sensorimotor dynamics of
moving animals, and even ecological or evolutionary dynamics
of organisms and populations. Here we focus on four case
studies of the sensorimotor dynamics of animals, each of which
involves the application of principles from control theory to
probe stability and feedback in an organism's response to
perturbations. We use examples from aquatic (electric �fish
station keeping and jamming avoidance), terrestrial (cockroach
wall following) and aerial environments (flight control
in moths) to highlight how one can use control theory to understand
how feedback mechanisms interact with the physical
dynamics of animals to determine their stability and response
to sensory inputs and perturbations. Each case study is cast
as a control problem with sensory input, neural processing,
and motor dynamics, the output of which feeds back to the
sensory inputs. Collectively, the interaction of these systems
in a closed loop determines the behavior of the entire system.
Keywords: feedback, control theory, neuromechanics, stability,
locomotion.
By going to this URL, you can download the full-text document. It's listed as number 1 under the heading, Preprints.
http://limbs.lcsr.jhu.edu/publications/
Best,
Kent
···
On Apr 16, 2014, at 5:45 AM, Matti Kolu wrote:
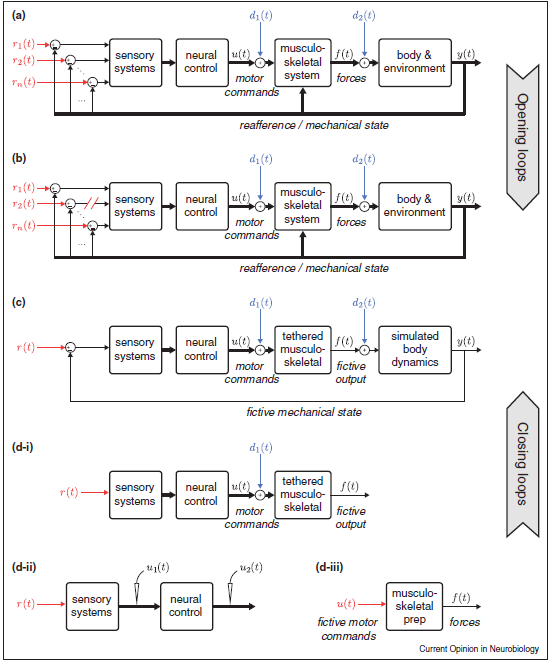
[From Matti Kolu (2014.04.16.1245 CET)]
A comparative approach to closed-loop computation
E Roth, S Sponberg, NJ Cowan
http://dx.doi.org/10.1016/j.conb.2013.11.005
Current Opinion in Neurobiology. Volume 25, April 2014, Pages 54�62
"Neural computation is inescapably closed-loop: the nervous system
processes sensory signals to shape motor output, and motor output
consequently shapes sensory input. Technological advances have enabled
neuroscientists to close, open, and alter feedback loops in a wide
range of experimental preparations. The experimental capability of
manipulating the topology�that is, how information can flow between
subsystems�provides new opportunities to understand the mechanisms and
computations underlying behavior. These experiments encompass a
spectrum of approaches from fully open-loop, restrained preparations
to the fully closed-loop character of free behavior. Control theory
and system identification provide a clear computational framework for
relating these experimental approaches. We describe recent progress
and new directions for translating experiments at one level in this
spectrum to predictions at another level. Operating across this
spectrum can reveal new understanding of how low-level neural
mechanisms relate to high-level function during closed-loop behavior."
http://www.sciencedirect.com/science/article/pii/S095943881300216X
Full-text currently available at
http://limbs.lcsr.jhu.edu/wp-content/uploads/2013/12/rothcomparative2014.pdf or
http://faculty.washington.edu/bergs/Simon_Sponberg/Publications_files/Roth_Sponberg_2014_Curr%20Opin%20Neurobiol.pdf
Matti