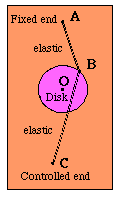
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you still make the argument that the finger at C could control the finger at A or vice versa?
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you still make the argument that the finger at C could control the finger at A or vice versa?
RM: I don’t understand this diagram. Where is E and S? Does the disk move?Â
RM: I will say that it is only possible for E to control S’s actions in the rubber band demo if S is able to act (by pulling on his end of the rubber band with appropriate force) so as to control the position of the knot.
Best
Rick
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.â?
                --Antoine de Saint-Exupery
Rick, The E and S are points A and C. The point A does not need to be fixed. The moral of the story is that the position of the knot (point B) depends on the path which the subject moves his finger in. Therefore, a final position of the subjects finger can result in two different positions of the knot. As such, E cannot control the position of S’s finger by controlling the position of the knot. Â
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you still make the argument that the finger at C could control the finger at A or vice versa?
RM: I don’t understand this diagram. Where is E and S? Does the disk move?Â
RM: I will say that it is only possible for E to control S’s actions in the rubber band demo if S is able to act (by pulling on his end of the rubber band with appropriate force) so as to control the position of the knot.
Best
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
One observation to make is that the disc constrains B to one degree of freedom. This being so, C can only control one degree of freedom of the position of A, and vice versa. For each position of C or A, there is a whole
line of positions of the other that leaves B in the same place. C has no control over A’s choice of position along one of these lines.
– Richard
···
From: PHILIP JERAIR YERANOSIAN csgnet@lists.illinois.edu Sent: Monday, June 18, 2018 8:46:24 PM To: Richard Marken Cc: csgnet Subject: Re: rubber band experiment revisited
Rick, The E and S are points A and C. The point A does not need to be fixed. The moral of the story is that the position of the knot (point B) depends on the path which the subject moves his finger in. Therefore, a final position of the subjects finger
can result in two different positions of the knot. As such, E cannot control the position of S’s finger by controlling the position of the knot.
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you
still make the argument that the finger at C could control the finger at A or vice versa?
RM: I don’t understand this diagram. Where is E and S? Does the disk move?
RM: I will say that it is only possible for E to control S’s actions in the rubber band demo if S is able to act (by pulling on his end of the rubber band with appropriate force) so as to control the position of the knot.
Best
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.”
–Antoine de Saint-Exupery
On Mon, Jun 18, 2018 at 3:13 PM, “Richard Kennaway (CMP - Visitor)” csgnet@lists.illinois.edu wrote:
RK: One observation to make is that the disc constrains B to one degree of freedom. This being so, C can only control one degree of freedom of the position of A, and vice versa. For each position of C or A, there is a whole
line of positions of the other that leaves B in the same place. C has no control over A’s choice of position along one of these lines.
RM:Â Excellent observation. So C can control the position of A’s finger, but only in the vertical dimension (on the graph). Becuase the knot, B, can only be controlled in a vertical position.Â
Best
Rick
Â
– Richard
From: PHILIP JERAIR YERANOSIAN csgnet@lists.illinois.edu Sent: Monday, June 18, 2018 8:46:24 PM To: Richard Marken Cc: csgnet Subject: Re: rubber band experiment revisited
Â
Rick, The E and S are points A and C. The point A does not need to be fixed. The moral of the story is that the position of the knot (point B) depends on the path which the subject moves his finger in. Therefore, a final position of the subjects finger
can result in two different positions of the knot. As such, E cannot control the position of S’s finger by controlling the position of the knot. Â
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you
still make the argument that the finger at C could control the finger at A or vice versa?
RM: I don’t understand this diagram. Where is E and S? Does the disk move?Â
RM: I will say that it is only possible for E to control S’s actions in the rubber band demo if S is able to act (by pulling on his end of the rubber band with appropriate force) so as to control the position of the knot.
Best
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Rick
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
RK: For each position of C or A, there is a whole line of positions of the other that leaves B in the same place. C has no control over A’s choice of position along one of these lines.
PY: It is not a line. There is a 2D region roughly in the shape of a diamond which will leave B in the same place.Â
On Mon, Jun 18, 2018 at 3:13 PM, “Richard Kennaway (CMP - Visitor)” csgnet@lists.illinois.edu wrote:
RK: One observation to make is that the disc constrains B to one degree of freedom. This being so, C can only control one degree of freedom of the position of A, and vice versa. For each position of C or A, there is a whole
line of positions of the other that leaves B in the same place. C has no control over A’s choice of position along one of these lines.
RM:Â Excellent observation. So C can control the position of A’s finger, but only in the vertical dimension (on the graph). Becuase the knot, B, can only be controlled in a vertical position.Â
Best
Rick
Â
– Richard
From: PHILIP JERAIR YERANOSIAN csgnet@lists.illinois.edu Sent: Monday, June 18, 2018 8:46:24 PM To: Richard Marken Cc: csgnet Subject: Re: rubber band experiment revisited
Â
Rick, The E and S are points A and C. The point A does not need to be fixed. The moral of the story is that the position of the knot (point B) depends on the path which the subject moves his finger in. Therefore, a final position of the subjects finger
can result in two different positions of the knot. As such, E cannot control the position of S’s finger by controlling the position of the knot. Â
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you
still make the argument that the finger at C could control the finger at A or vice versa?
RM: I don’t understand this diagram. Where is E and S? Does the disk move?Â
RM: I will say that it is only possible for E to control S’s actions in the rubber band demo if S is able to act (by pulling on his end of the rubber band with appropriate force) so as to control the position of the knot.
Best
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Rick
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Suppose we redid the rubber band experiment but the knot
was attached to the point B in the image below (Zeeman
machine). Given that there are two equilibrium positions
which the knot (point B) can assume that depend on the path
which C takes, could you still make the argument that the
finger at C could control the finger at A or vice versa?
What if C is an experimenter and A is a subject, what is A being
asked to do? You have had answers by people who seem to understand
our question, but I don’t, and since you disagreed with their
answers, maybe they didn’t, either. In the “classic” rubber band
demo, A is asked to keep the knot on a certain point on the surface.
Is this also the task in your variant? If so, what do equilibrium
positions of B have to do with the issue? Either the reference
position of the knot is on the trace of the circumference of the
disk or it isn’t. If it is, A’s task is possible. If not, it isn’t.
But maybe that’s not what you are asking A to do in your statement,
since you bring B’s equilibrium positions into the question as
essential elements of the problem.
I am fascinated by how this video got 3,000 plus views. Is someone else doing rubber band demonstrations?! And again, what is the purpose of this demo?
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you still make the argument that the finger at C could control the finger at A or vice versa?
RM: I don’t understand this diagram. Where is E and S? Does the disk move?
RM: I will say that it is only possible for E to control S’s actions in the rubber band demo if S is able to act (by pulling on his end of the rubber band with appropriate force) so as to control the position of the knot.
Best
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
On Mon, Jun 18, 2018 at 3:13 PM, “Richard Kennaway (CMP - Visitor)” csgnet@lists.illinois.edu wrote:
RK: One observation to make is that the disc constrains B to one degree of freedom. This being so, C can only control one degree of freedom of the position of A, and vice versa. For each position of C or A, there is a whole
line of positions of the other that leaves B in the same place. C has no control over A’s choice of position along one of these lines.
RM: Well my Russian is a little rusty so I didn’t understand what they were trying to show in that video Phillip sent ( https://www.youtube.com/watch?v=d_7v0sgPcac&t=268s ) but it looks like the pivot point (B) can be moved in two dimensions, not just one. So it’s not really a good demonstration of being able to control (by disturbance to a controlled variable) only one df of the controllee’s 2 df of output.Â
BestÂ
Rick
– Richard
From: PHILIP JERAIR YERANOSIAN csgnet@lists.illinois.edu Sent: Monday, June 18, 2018 8:46:24 PM To: Richard Marken Cc: csgnet Subject: Re: rubber band experiment revisited
Â
Rick, The E and S are points A and C. The point A does not need to be fixed. The moral of the story is that the position of the knot (point B) depends on the path which the subject moves his finger in. Therefore, a final position of the subjects finger
can result in two different positions of the knot. As such, E cannot control the position of S’s finger by controlling the position of the knot. Â
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you
still make the argument that the finger at C could control the finger at A or vice versa?
RM: I don’t understand this diagram. Where is E and S? Does the disk move?Â
RM: I will say that it is only possible for E to control S’s actions in the rubber band demo if S is able to act (by pulling on his end of the rubber band with appropriate force) so as to control the position of the knot.
Best
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Rick
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
On Mon, Jun 18, 2018 at 3:13 PM, “Richard Kennaway (CMP - Visitor)” csgnet@lists.illinois.edu wrote:
RK: One observation to make is that the disc constrains B to one degree of freedom. This being so, C can only control one degree of freedom of the position of A, and vice versa. For each position of C or A, there is a whole
line of positions of the other that leaves B in the same place. C has no control over A’s choice of position along one of these lines.
RM: Well my Russian is a little rusty so I didn’t understand what they were trying to show in that video Phillip sent ( https://www.youtube.com/watch?v=d_7v0sgPcac&t=268s ) but it looks like the pivot point (B) can be moved in two dimensions, not just one. So it’s not really a good demonstration of being able to control (by disturbance to a controlled variable) only one df of the controllee’s 2 df of output.Â
BestÂ
Rick
– Richard
From: PHILIP JERAIR YERANOSIAN csgnet@lists.illinois.edu Sent: Monday, June 18, 2018 8:46:24 PM To: Richard Marken Cc: csgnet Subject: Re: rubber band experiment revisited
Â
Rick, The E and S are points A and C. The point A does not need to be fixed. The moral of the story is that the position of the knot (point B) depends on the path which the subject moves his finger in. Therefore, a final position of the subjects finger
can result in two different positions of the knot. As such, E cannot control the position of S’s finger by controlling the position of the knot. Â
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you
still make the argument that the finger at C could control the finger at A or vice versa?
RM: I don’t understand this diagram. Where is E and S? Does the disk move?Â
RM: I will say that it is only possible for E to control S’s actions in the rubber band demo if S is able to act (by pulling on his end of the rubber band with appropriate force) so as to control the position of the knot.
Best
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Rick
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
On Mon, Jun 18, 2018 at 3:13 PM, “Richard Kennaway (CMP - Visitor)” csgnet@lists.illinois.edu wrote:
RK: One observation to make is that the disc constrains B to one degree of freedom. This being so, C can only control one degree of freedom of the position of A, and vice versa. For each position of C or A, there is a whole
line of positions of the other that leaves B in the same place. C has no control over A’s choice of position along one of these lines.
RM: Well my Russian is a little rusty so I didn’t understand what they were trying to show in that video Phillip sent ( https://www.youtube.com/watch?v=d_7v0sgPcac&t=268s ) but it looks like the pivot point (B) can be moved in two dimensions, not just one. So it’s not really a good demonstration of being able to control (by disturbance to a controlled variable) only one df of the controllee’s 2 df of output.Â
BestÂ
Rick
– Richard
From: PHILIP JERAIR YERANOSIAN csgnet@lists.illinois.edu Sent: Monday, June 18, 2018 8:46:24 PM To: Richard Marken Cc: csgnet Subject: Re: rubber band experiment revisited
Â
Rick, The E and S are points A and C. The point A does not need to be fixed. The moral of the story is that the position of the knot (point B) depends on the path which the subject moves his finger in. Therefore, a final position of the subjects finger
can result in two different positions of the knot. As such, E cannot control the position of S’s finger by controlling the position of the knot. Â
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you
still make the argument that the finger at C could control the finger at A or vice versa?
RM: I don’t understand this diagram. Where is E and S? Does the disk move?Â
RM: I will say that it is only possible for E to control S’s actions in the rubber band demo if S is able to act (by pulling on his end of the rubber band with appropriate force) so as to control the position of the knot.
Best
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Rick
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
RM: I presume you are asking whether E can control S in the version of the rubber band demo when the knot is attached to a peg on a rotating disk. The answer is "yes" to the extent that 1) S can control the position of the knot and 2) E can produce disturbances to the position of the knot that can be countered by S's outputs (variations in finger position). When both of these conditions apply then E can control the variations in the finger position that S uses to keep the position of the knot under control.Â
RM: In the basic rubber band demo and in your proposed variation of of the demo, these conditions apply up to a point. For example, in the basic rubber band demo, E cannot get S's finger position closer to the knot than the length of the rubber band that connects S to the knot (try it and you'll see why). In your variant of the rubber band demo there are probably even more constrains on E's ability to control S's finger position. It might be worth it to build a simulation of the situation you describe (I might do it using Legos) and I think you'll see that you (as E) can control Ss finger position but only to a very limited extent.
BestÂ
Rick
[Bruce Nevin 2018-06-25_08:35:47 ET]
It's an illustration of a cusp catastrophe.
RK: One observation to make is that the disc constrains B to one degree of freedom. This being so, C can only control one degree of freedom of the position of A, and vice versa. For each position of C or A, there is a whole line of positions of the other that leaves B in the same place. C has no control over A's choice of position along one of these lines.
RM: Well my Russian is a little rusty so I didn't understand what they were trying to show in that video Phillip sent ( <https://www.youtube.com/watch?v=d_7v0sgPcac&t=268s>https://www.youtube.com/watch?v=d_7v0sgPcac&t=268s ) but it looks like the pivot point (B) can be moved in two dimensions, not just one. So it's not really a good demonstration of being able to control (by disturbance to a controlled variable) only one df of the controllee's 2 df of output.Â
BestÂ
>>>>
-- Richard
From: PHILIP JERAIR YERANOSIAN <<mailto:csgnet@lists.illinois.edu>csgnet@lists.illinois.edu>
Sent: Monday, June 18, 2018 8:46:24 PM
Richard Marken
csgnet
Subject: Re: rubber band experiment revisited
Rick, The E and S are points A and C. The point A does not need to be fixed. The moral of the story is that the position of the knot (point B) depends on the path which the subject moves his finger in. Therefore, a final position of the subjects finger can result in two different positions of the knot. As such, E cannot control the position of S's finger by controlling the position of the knot. Â
[Rick Marken 2018-06-18_08:50:08]
philip 6/17 15:00
Suppose we redid the rubber band experiment but the knot was attached to the point B in the image below (Zeeman machine). Given that there are two equilibrium positions which the knot (point B) can assume that depend on the path which C takes, could you still make the argument that the finger at C could control the finger at A or vice versa?
RM: I don't understand this diagram. Where is E and S? Does the disk move?Â
RM: I will say that it is only possible for E to control S's actions in the rubber band demo if S is able to act (by pulling on his end of the rubber band with appropriate force) so as to control the position of the knot.
Best
Rick
--
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
--
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
···
On Tue, Jun 26, 2018 at 6:26 PM, PHILIP JERAIR YERANOSIAN <<mailto:csgnet@lists.illinois.edu>csgnet@lists.illinois.edu> wrote:
On Mon, Jun 25, 2018 at 5:36 AM, Bruce Nevin <<mailto:csgnet@lists.illinois.edu>csgnet@lists.illinois.edu> wrote:
On Tue, Jun 19, 2018 at 12:07 PM Richard Marken <<mailto:csgnet@lists.illinois.edu>csgnet@lists.illinois.edu> wrote:
On Mon, Jun 18, 2018 at 3:13 PM, "Richard Kennaway (CMP - Visitor)" <<mailto:csgnet@lists.illinois.edu>csgnet@lists.illinois.edu> wrote:
On Mon, Jun 18, 2018 at 8:50 AM, Richard Marken <<mailto:csgnet@lists.illinois.edu>csgnet@lists.illinois.edu> wrote:
have nothing left to take away.�
                --Antoine de Saint-Exupery
--
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Suppose the reference state is one of the equilibrium positions. If E
produces a disturbance by shifting the knot to one of the other
equilibrium positions, then in order to bring the knot back to the
reference state, S must move his finger in a path which intersects a
particular line segment. Therefore, E can be said to "control" this
variable. However, given the point Boris made about the definition of
control being the selection of a state in the controlling system, I am
now reluctant to admit: (1) that a perception is a state of a
controlling system; and (2) that S is a controlling system from the
point of view of E and vice versa.