Thanks Kent,
for your explanation. It was very educational. :). But as I see it
discussion between me and Rick was quite partial not so general, so I
thought that we could maybe put it on general level…
But for the whole (general) discussion about possibilities of "controlling
each other" I have all the time in my mind your thoughts about possible
pricniples of “control of other people behavior” or as you call it
“interpersonal control”. Your language somehow easily express what I think.
The starting points are :
KM :
- Whatever the strategy employed, it seems that control of a person’s
perceptions always remains with the person, and thus that no person can
achieve direct control of another’s behavior.
- Even when people choose to obey, they remain in control of their own
perceptions.
- …(from a PCT viewpoint) is to create a disturbance large enough to get
the other party to readjust his or her reference levels.
- …when a person observes another person’s physical actions, the observer
can see “behaviors” at a lot of different perceptual levels.
I took just thoughts for which I could find physioogical evidence.
HB :
I think that the most what people can do to another people is to make them
as you wrote “readjust” the reference level, so other people can not
normally directly access to direct control of another behavior.
So PCT by my oppinion reveals the inherent limitations of all of our
attempts to control other people’s behavior. We have to understand how
organisms work to understand how references are producced and how they can
be “readjusted” by environment. But all that can be done only inside
organism.
Because I think that behavior can be treated just as disturbance to another
person’s control, I can’t imagine how references for behavior can be set
from outside (others behavior) so that we can say that other people are
controlled. One way is to imagine “force” which another person with intended
“strategies of interpersonal control” try to influence others. So I can
imagine how people can probably be “induced” to change references. But I can
imagine only of few kind of human behavior that could “cause” different
“production” of references in other’s behavior, so to control organisms
control of references. One is “genetical engineering”, behavior which can
produce new internal standards for references in organisms, because in basic
organisms functional references are genetically set.
The main point of PCT as I see it, is that organisms produce references and
“adjust” it through perceptual signal through social or physical
environment. So it’s difficult to imagine how people can create references
in other person’s organism. I think that always only person (Living Control
System) in control can. I think that mostly people control their lives by
“adjusting” and “readjusting” their references. But they can be produced
only inside organisms.
So other people can apply behaviors that can “lower” the intensity of
disturbances to someone’s perceptual control (help them for easier control)
or make such a disturbances that increase the intensity of disturbances to
other people control (obstruct their control). But people can not ever
“overtake” the control of other people behavior in the course of thinking
with some principles that you proposed.
So I think that people can limit control of others, or put "degrees of
freedom to zero" or apply other disturbances which could differently affect
other person’s perceptual control, but by my oppinion they can never control
them in normal everyday circumstances, as they can’t ever access to others
direct production of references in the sense that they could overtake the
control of others behavior. For that they would need to set the reference
for behavior from outside and that is “forbidden in PCT” as far as I
understand. And I think that’s the problem with 11th level when somebody can
think it as suitable to set reference to that level from outside for example
social environment. But Bill as far as i know never allowed that. Although
it seems that references on that level could come from environment (physical
or social). But only organism as a whole with reference self-production can
take care of self-existance.
As I suggested “genetic engineering” can be one way of intervention into
organic structure of organisms , maybe also electric shock, some chemical
substances, surgery…). But even in these cases “disturbances” produced
inside organism has to use organisms potentials for reference “production”.
Sheepdogs are controiling whatever they control and sheeps are controlling
what ever they control inside organism. Their control can interfear. But
control always stays at the Living Control Systems (as you pointed out)
which have to survive with physiological processes inside producing their
references. So if we are looking people arround they succesfully control
whatever they are controlling in all “directions” following their goals
which “grow inside” organism.
And when “gosammer threads” as you describe people interaction intersect,
than some changes in references and control loop can happen, because “mix”
disturbances (as you one’s called them) can affect perceptual control and
thus also “readjustment” of references by organism in control. But I don’t
see how “production” of reference signals can be “induced” with other
behavior.
So as I see it references can not be set from outside (only in rare cases)
and also not control. They are always set inside the organism with included
inside and outside disturbances to internal organisms control. And if
references can not be set in other organism, how can LCS be controlled with
behavior of others ? It sems that only organsim itself can make behavior
“match” to “controller” wishes.
Best,
Boris
-----Original Message-----
From: csgnet-request@lists.illinois.edu
[mailto:csgnet-request@lists.illinois.edu] On Behalf Of McClelland, Kent
Sent: Monday, September 08, 2014 3:54 AM
To: csgnet@lists.illinois.edu
Subject: Re: Sheepdog and flock behavior
[From Kent McClelland (2014.09.07.2050)
Rick Marken (2014.09.07.1100)] in response to Boris Hartman
Hi, Rick and Boris. I hope you’re both doing well. I see that my name has
come up in this exchange, so I’ll see if I can say anything to help move it
along. As I look at what you’ve written, I don’t see much in either person’s
position to disagree with, but you seem to be at an impasse. The difficulty
seems to be semantic, revolving around what it means to control another
person’s behavior, which Rick says can be done and Boris says can’t. In my
view, you’re both partly right.
KM: The problem, as I see it, is that a person’s behavior (or that of any
living control system with hierarchical control of perceptions) is never
just one thing. A person controls lots of different perceptions
simultaneously, at different perceptual levels. And when a person observes
another person’s physical actions, the observer can see “behaviors” at a lot
of different perceptual levels.
KM: A person acting as a subject in the classic PCT rubber-band experiment,
for instance, can be observed to be bending a finger so as to keep the
rubber band in place, moving the hand and arm in a pattern that tends to
mirror the movements of the “experimenter’s” hand, sitting in a chair
(perhaps), making motions with the face that (perhaps) indicate a grimace or
smile or some other expression, holding the head in position to see the
rubber band, leaning on the table (perhaps) with the other hand or elbow,
breathing, holding the rubber band’s knot over the dot, participating in the
rubber band experiment, and no doubt lots of other things depending on the
observer’s acuity of observation and frames of reference.
KM: All of these “behaviors” are under the person’s control, in the sense
that the person could change them if he or she chose to do so, though many
of them may not be in the person’s conscious awareness at any given moment.
And some of the behaviors are probably not in direct control, in the sense
that disturbances to these actions might not be resisted, because they are
simply the means for controlling the person’s highest-priority perception of
the moment, which is making sure the dot stays over the knot.
KM: Because a person controls lots of different things at once, under the
right circumstances another person can control SOME of these behaviors (as
the controller perceives them), but not ALL of them, at least not all of
them simultaneously. The trick in controlling a particular behavior by
another person (call it behavior A) is to get the person to focus on
controlling behavior B, and then to remove all the other ways for the person
to keep controlling behavior B except by doing behavior A.
KM: That’s the classic pattern for manipulation of a person’s behavior. In
the rubber-band experiment, for example, the experimenter can make the
subject trace some geometric pattern of hand motions (behavior A) by
providing the right disturbances, because if the subject wants to keep the
knot over the dot (behavior B) the only means of doing so, given those
disturbances and the set-up of the experiment, is to make the hand pattern
(behavior A).
KM: It’s also the classic pattern of coercion: "Do what I tell you (behavior
A), or else you won’t be able to continue to perceive that your mother is
still alive (behavior B)."
KM: The pattern also applies to the dog and sheep example. The sheep cluster
together and move in the desired direction (behavior A), because they want
to perceive themselves as safe from an attack by that nasty predator
sheepdog (behavior B), which is a higher priority perception for them, at
least temporarily, than perceiving themselves to be munching on nicest and
juiciest tufts of grass (behavior C). (The really interesting question of
control here is how the shepherd is controlling the sheepdog-what set of
perceptions is that dog controlling?)
KM: Thus, the control of one person’s behavior by another person can and
does happen, but it is always partial control, at the most, and the
controlled person always retains control of some perceptions (like perhaps
the perception that the controller is a jerk). As soon as the person stops
controlling behavior B or finds another way to control it that doesn’t
involve behavior A, the attempt to control fails.
RM: One example: When I give a cashier $10 for a $5 item I am controlling
for the cashier giving me $5 change. The cashier is also controlling for me
paying $5 for the item. Typically, we both get the behaviors from each other
than we want: a nice example of mutual control, and no one gets hurt (or
oppressed). This kind of agreed on mutual control is the basis of
civilization.
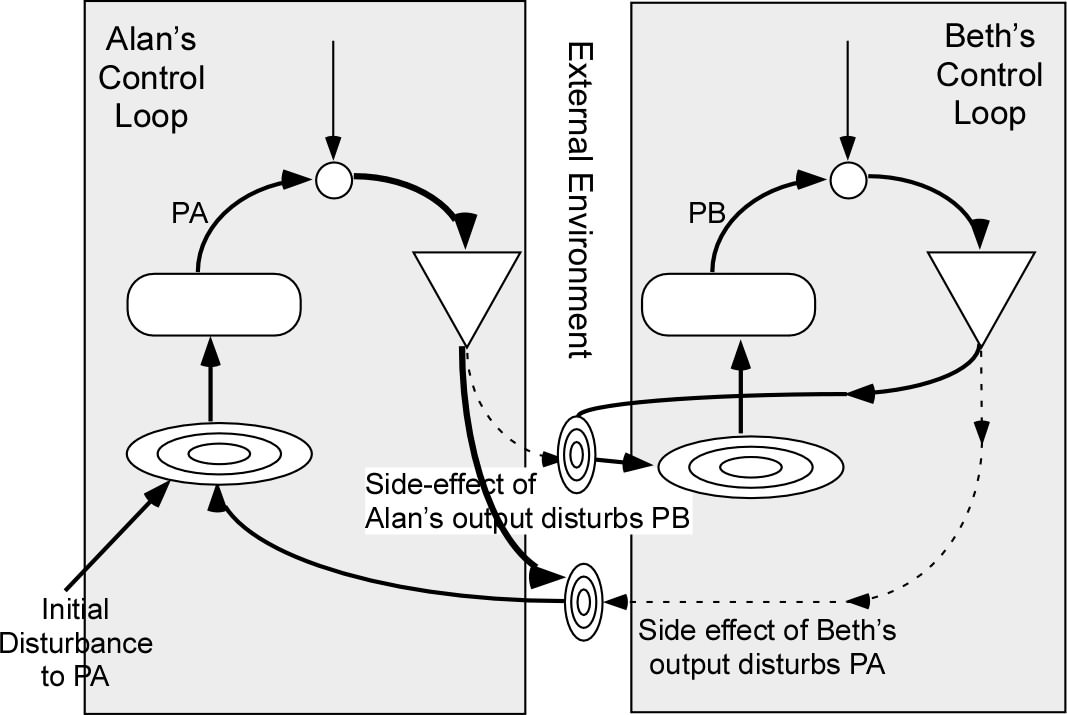
KM: Martin Taylor, in the chapter he’s writing for the LCS IV book edited by
Warren Mansell (a preliminary draft of which I’ve been lucky enough to see),
calls this kind of exchange transaction a “protocol,” and, if I understand
his concept correctly, protocols provide a way for two people acting
together to control two different perceptions. The side-effects of one
person’s behavior in controlling his or her own perception allow the other
person to control a different perception (and vice-versa). In your example,
the cashier controls the perception of completing a sale by getting your
money and giving you the item and $5 change, while you control the
perception of buying the item by handing over the money and getting the item
and change back.
KM: I don’t think I would describe this exchange situation as control of
another person’s behavior unless you were buying the item from someone who
had a monopoly, and the only way for you to get the item (behavior B) would
be to pay the asking price (behavior A). Even then, you could refuse to buy
the item or just get something else, unless the item were something you
couldn’t live without.
Hope these thoughts help you to clarify the questions you were discussing.
Best,
Kent
On Sep 7, 2014, at 12:54 PM, Richard Marken wrote:
[From Rick Marken (2014.09.07.1100)]
boris.hartman@masicom.net wrote:
BH : I don’t think that dogs were controlling gaps by >controlling sheeps
behavior<. Sheeps were controlling their behavior on the bases of
disturbances dog produced to sheep perceptual control.
RM: Yes, the sheep were controlling a perception (I called it safety) to
which the approach of the dog was a disturbance. The sheep compensated for
this disturbance by moving closer to other sheep. This is the behavior that
the dog wanted to see (were controlling for) because it closed the gaps that
were a disturbance to the perception the dog was controlling. So the dog was
able to control the behavior of the sheep, getting them to bunch closer
together, because the sheep were controlling for safety by bunching
together.
RM : So any model of this behavior would have to model the dogs’ “gap”
control system and the sheep’s safety control system. Such a simulation
would show that control systems can both control and be controlled.
BH : Well this is a good idea to make simultaneous simulation. Did you try
it ?
RM: Not yet.
BH: But this is the n-th time that we are trying to solve the problem how
LCS can be “controlled”. In the book : Making sense of behavior Bill talks
about “attempts of control” not “control”…
BH: Maybe Kent could explain what’s wrong with your position about >LCS
can be controlled".
RM: Yes, I think that’s a good idea, though I would be surprised if Kent
thought that there is something wrong with my “position”. My position is
simply that people can clearly control the behavior other people and their
own behavior can be controlled as well. This is an observable fact that is
explained by PCT. I leave the explanation as an exercise.
RM : It can also be easily demonstrated with humans using the rubber band
demo; the E in this experiment can control the finger position of the S once
S has agreed to control the position of the knot.
BH : Yes. Watch your wording in rubber band demo. “Once S has agreed” or
as Kent said “S chooses”. . So it’s obviously that S agreed to be
controlled.
RM: Not quite. S has agreed to control a particular perception (the
location of the knot relative to the dot, in this case). S has not agreed
to be controlled; indeed, S is typically unaware of being controlled after
agreeing to control that perception.
HB : Aplying distrubance to a >controlled variable< does not mean that
control is established. It seems that Kent and I agree that disturbances are
aplyed to perceptual control and target person chooses.
RM: I would be interested to hear what Kent has to say about that. I would
be very surprised if he agreed with your analysis.
RM : Nor does control theory show that controlling organisms (particularly
humans) is necessarily a bad thing to do.
BH : Now you are exaggerating Rick. You can’t control organisms. I’d
really like to see how you are doing that in everyday life ?
RM: One example: When I give a cashier $10 for a $5 item I am controlling
for the cashier giving me $5 change. The cashier is also controlling for me
paying $5 for the item. Typically, we both get the behaviors from each other
than we want: a nice example of mutual control, and no one gets hurt (or
oppressed). This kind of agreed on mutual control is the basis of
civilization.
RM : What control theory does show is that arbitrary control,
particularly of humans by other humans, will almost certainly lead to
conflict. Arbitrary control is exerting control without considering the fact
that living control systems are controlling many variables at the same time
and when you arbitrarily decide to have a person do something (by disturbing
a controlling variable) what you have them do may conflict with other things
they are controlling.
HB : It makes some sense, but I don’t understand what you meant by
arbitrary control< ?
RM: It means controlling without taking a persons wants and needs (the
references for the many different perceptions that the person is controlling
for) into account. In non-PCT terms, it is controlling another person
without respecting that person’s humanity (and autonomy).
BH: If you are thinking like this one : >Controlle behavior match my
wanted perception of behvior and thus it is >controlled< it’s wrong.
RM: That’s exactly how I am thinking. And I think you are wrong about this
being wrong.
BH: You have PCT which helps you understand what’s happening inside
organisms. Human control and behavior are quite unpredictable, because the
references are formed inside organism, where most of control is done.
RM: Once you have correctly identified a controlled variable behavior (the
actions that protect that variable from disturbance) can be predicted with
very high accuracy. See the “Basic Control demo” at
http://www.mindreadings.com/ControlDemo/BasicTrack.html to see what I mean.
BH: Just observable >facts< of behavioral event are not prove that people
control each other. Although it’s not excluded. The controller’s behavior is
just a disturbance to controlee perceptual control. From what happens in
controlee comparator (error) will probably decide whether controlee behavior
will resemble to something controller wanted or not. But never behavior of
controlee will be just exact >copy< of controller’s wanted behavior, because
controlee is in control.
RM: It may not be an “exact” copy of what the controller wants, but it
can be very close (like within 1% of the desired value).
RM: Anyway, this behavior – managing flocks – is a very interesting
demonstration of controlling a perception (of gaps between sheep) via
disturbance of a perception being controlled by the control systems that are
being controlled.
BH: This one makes some PCT sense. J
RM: Well, that’s progress!
Best
Rick
But as usual I’m living space for not understanding something right. And
as always, sorry for my language.
Best,
Boris
From: csgnet-request@lists.illinois.edu
[mailto:csgnet-request@lists.illinois.edu] On Behalf Of Richard Marken
Sent: Sunday, August 31, 2014 3:23 AM
To: csgnet@lists.illinois.edu
Subject: Re: Sheepdog and flock behavior
[From Rick Marken (2014.08.30.1820)]
[From Bruce Abbott (2014.08.30.0820 EDT)]
Researchers have investigated how sheepdogs manage their flocks by fitting
both the dogs and the sheep with highly accurate GPS devices, allowing the
researchers to track their movements. The research is presented in a BBC
article at http://www.bbc.com/news/science-environment-28936251 .
RM: Great find, Bruce! There are two things that make this report
particularly interesting to me. The first is the quote by Andrew King, which
is a great description of the PCT approach to research. To paraphrase King:
in order to understand the behavior of organisms you have to try to look at
their behavior from the point of view of the organism (behaving system)
Itself. I make this same point in the chapter on "Looking at Behavior
through Control Theory Glasses" in “Doing Research on Purpose” (why hasn’t
that become a best seller yet?). I do it in the section on trying to
understand the apparent “fixed action pattern” of the greylag goose. The
goose is seen to continue to make the movements that would pull an egg back
into its nest even when the egg is no longer present. Looking at an
organism’s behavior from the organism’s perspective helps you come up with
good ideas about what perceptual variables the organism is controlling (the
first step in the Test for the Controlled Variable). By looking at the
goose’s egg rolling behavior from the goose’s perspective I was able to come
up with the hypothesis that the goose is trying to control the pressure of
the egg against the back of its bill and when the egg is removed the
continued efforts to move the non-existent egg into the nest (the apparent
fixed action pattern) is just the efforts of the pressure control system to
restore the pressure of the egg against the back of the bill. By looking at
the sheepdogs herding behavior from the dogs’ perspective King came up with
the reasonable hypothesis that the dogs were controlling their perception of
the gaps between patches of white (the sheep), trying to keep those gaps at
zero.
RM: The other thing that’s interesting about this report is that the dogs
were clearly controlling their perception of the gaps by controlling the
behavior of the sheep. And they did this by becoming a disturbance to a
perception that the sheep control by getting closer to other sheep: the
perception of safety. So any model of this behavior would have to model the
dogs’ “gap” control system and the sheep’s safety control system. Such a
simulation would show that control systems can both control and be
controlled. This kind of simulation would help dispel what I think is a
common misconception about the control theory model of organisms –
particularly humans. It is a misconception that I myself labored under until
just a few years ago. It is the idea that because organisms are autonomous
control systems – autonomous in the sense that they set their own
references for the states of their own perception – they cannot be
controlled. But autonomous control systems can be controlled, as is
demonstrated by the sheepdogs controlling the sheep. It can also be easily
demonstrated with humans using the rubber band demo; the E in this
experiment can control the finger position of the S once S has agreed to
control the position of the knot. And thanks to Bruce Abbott I demonstrated
to myself that E can still exert this control even if S continuously – and
autonomously – varies his or her reference for the position of the knot.
RM: Control theory doesn’t say that organisms (particularly humans) can’t
be controlled; indeed, it shows that they can be controlled, mainly by
disturbance to a controlled variable. Nor does control theory show that
controlling organisms (particularly humans) is necessarily a bad thing to
do. What control theory does show is that arbitrary control, particularly of
humans by other humans, will almost certainly lead to conflict. Arbitrary
control is exerting control without considering the fact that living control
systems are controlling many variables at the same time and when you
arbitrarily decide to have a person do something (by disturbing a
controlling variable) what you have them do may conflict with other things
they are controlling. So to take an example that Bill used (somewhere), if E
decides to place S’s finger against a hot soldering iron while controlling
Ss finger position in the rubber band game that will clearly lconflict with
another goal S has (not getting burned). Non-arbitrary control is control
that is done with the consent (often implicit but sometimes explicit) of the
would-be controllee. Non- arbitrary control is, I think, essential when
humans control other humans. To see why, think about what happens when
people are arbitrarily controlled (herded) in the same way that the sheep
were. Hint: They don’t like it. Why do you think not?
RM: Anyway, this behavior – managing flocks – is a very interesting
demonstration of controlling a perception (of gaps between sheep) via
disturbance of a perception being controlled by the control systems that are
being controlled.
Best
Rick
The researchers found that the behavior could be described by two simple
rules, but more interesting from a PCT perspective, they found that to
understand the behavior they needed to view the action from the animal’s
perspectives. According to researcher Dr. Andrew King:
"At the beginning we had lots of different ideas. We started out looking
from a birds eye view, but then we realised we needed to see what the dog
sees. It sees white, fluffy things. If there are gaps between them or the
gaps get bigger, the dogs needs to bring them together."
According to Dr King, sheepdogs are making the most of the "selfish herd
theory" to bring the animals close together and move them where they want.
"One of the things that sheep are really good at is responding to a threat
by working with their neighbours. It’s the selfish herd theory: put
something between the threat and you. Individuals try to minimise the chance
of anything happening to them, so they move towards the centre of a group."
The article continues as follows:
A colleague, Dr Daniel Strombom from Uppsala University in Sweden, used
the GPS data from the collars to develop computer simulations. This enabled
them to develop a mathematical shepherding model.
The algorithm displays the same weaving pattern exhibited by sheepdogs. It
helps to solve what has been called the ‘the shepherding problem’: how one
agent can control a large number of unwilling agents.
I’d be interested to know whether the computer algorithm models each
individual’s control systems or operates by some other method.
Bruce
–
Richard S. Marken, Ph.D.
Author of Doing Research on Purpose.
Now available from Amazon or Barnes & Noble
–
Richard S. Marken, Ph.D.
Author of Doing Research on Purpose.
Now available from Amazon or Barnes & Noble