[From Fred Nickols (2013.12.29.1508 EST)]
Bruce:
What you call “ringing” is what I know as “hunting” – more specifically, hunting about the point of correspondence. In a weapons (gun) system on board ship, the gun mount catches up to the ordered signal but, owing to inertia (and a five ton gun mount has a lot of that, especially when swinging out), it overshoots, then goes back the other way, overshooting a bit less until the oscillations dampen out and the gun mount is synced with the order. If the starting point had a huge discrepancy between ordered and actual position there would be some major oscillations, which is why the order given was “Train out, match up and shift to automatic.” The gun captain would then (using a device similar to a joy stick bring the mount into close correspondence with the order (read on a dial) and then shift to automatic. That way hunting was minimized (as was shaking up the guys inside the gun mount).
Fred
···
From: Bruce Abbott [mailto:bbabbott@FRONTIER.COM]
Sent: Sunday, December 29, 2013 11:39 AM
To: CSGNET@LISTSERV.ILLINOIS.EDU
Subject: Stability and Control
[From Bruce Abbott (2013.12.29.1140 EST)]
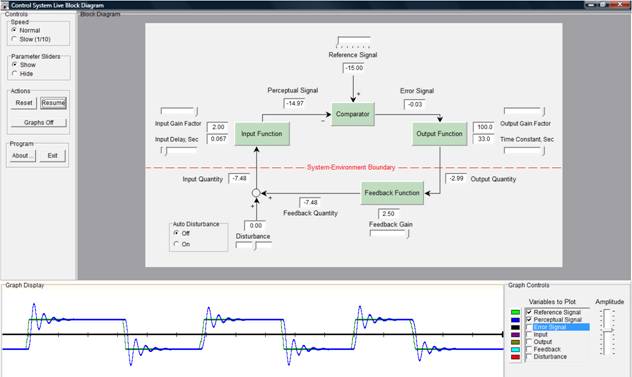
Here are some screen shots from the LiveBlock demo of LCS III. In the first one, I’ve set the gains as high as the limits of the program will allow me to set them, giving a loop gain of 500:
Plotted at bottom are the values of the reference and perceptual signals. For the demonstration I used the reference signal slider to rapidly change the reference signal value between +15 and -15 units (green line). Notice how the perceptual signal (blue line) overshoots the reference value, then oscillates around it as the excursions diminish. This behavior is called “ringing.” Although ringing is not a sign of good control, the system is nevertheless stable since the perceptual signal eventually converges to a single value. By reducing the gain a bit we can eliminate the ringing.
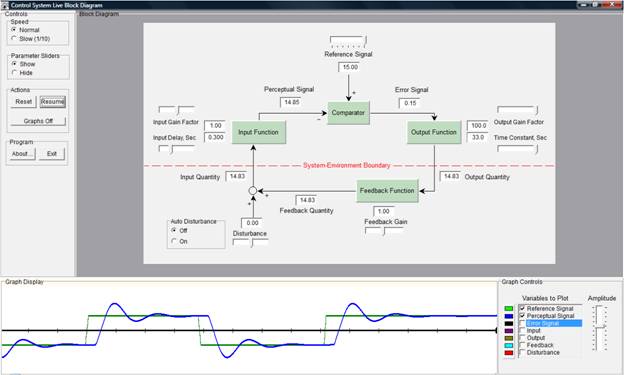
In the next screenshot, the gains have been returned to their default values, but not the “input delay” has been increased. This change increases the lag in the system.
Increasing the lag has again introduced ringing. Again the perceptual signal eventually converges on a single value so the system is stable, although once again it is on the verge of instability.
Ringing not confined to poorly tuned control systems. You can also observe it in equilibrium systems like the ball-in-the-bowl example if there is a bit of friction in the system. The ball oscillates in a diminishing pattern until it comes to rest at the minimum energy point, the bottom of the bowl. If you tip the bowl up a bit, the ball will still settle at the lowest point n the bowl, but this will be a different location than before – similar to a change of reference value in a control system. The new location is not a reference value, however; it’s just a new equilibrium position relative to the bowl’s inner surface.
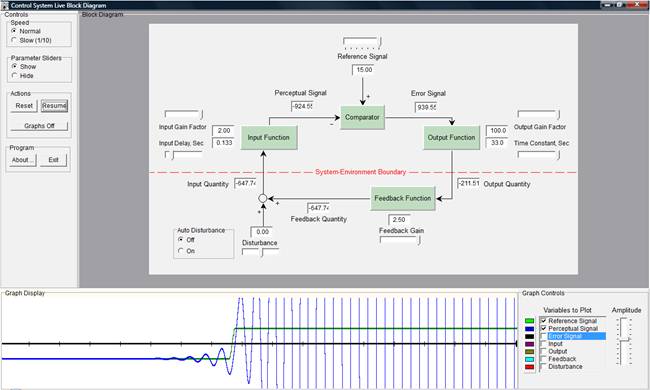
The final screenshot shows what happens when the parameters of gain and/or lag are such that the system becomes unstable.
The system actually started to ring before I had a chance to change the reference. The magnitude of the excursions above and below the reference level increases with each swing. The amplitude is running off to infinity (or at least the maximum output the system is capable of delivering to the CV) and can lead to destruction of a physical output device. What is happening is that the usual negative feedback has changed to positive feedback because the output is getting out of phase with the changes to the CV: by the time the system begins to correct a swing in one direction, the CV is changing in the other direction and the output amplifies that swing rather than attenuating it.
From these demonstrations I think it’s safe to conclude that stability/instability is a property of behavior that can be observed in dynamical systems in general, including both control systems and equilibrium systems.
Bruce


