From [Marc Abrams (2005.12.06.1555)]
I’d like address an area that I believe a lot of misunderstanding and a lack of real knowledge has , I believe hurt PCT and the modeling efforts of many.
Most people, even current modelers in SD believe that SD is all about differential equations, derivatives and integrals but I am going to show you that this is a huge mistake.
Jay Forrester the developer of SD is an electrical engineer and besides developing SD worked on the first core memory for computers at MIT, but he was basically a servo-mechanism engineer, so control systems was a big part of his background.
In 1960 he wrote his second book, Principles of Systems, and in it he provided an introduction to system dynamics and modeling.
SD basically has the three modeling components. A level, a rate, and auxiliary variables. That is it, and most folks think that the ‘rate’ component is nothing more than the derivative; WRONG. I’ll let Jay explain what it is himself;
Pgs 4-14 -15
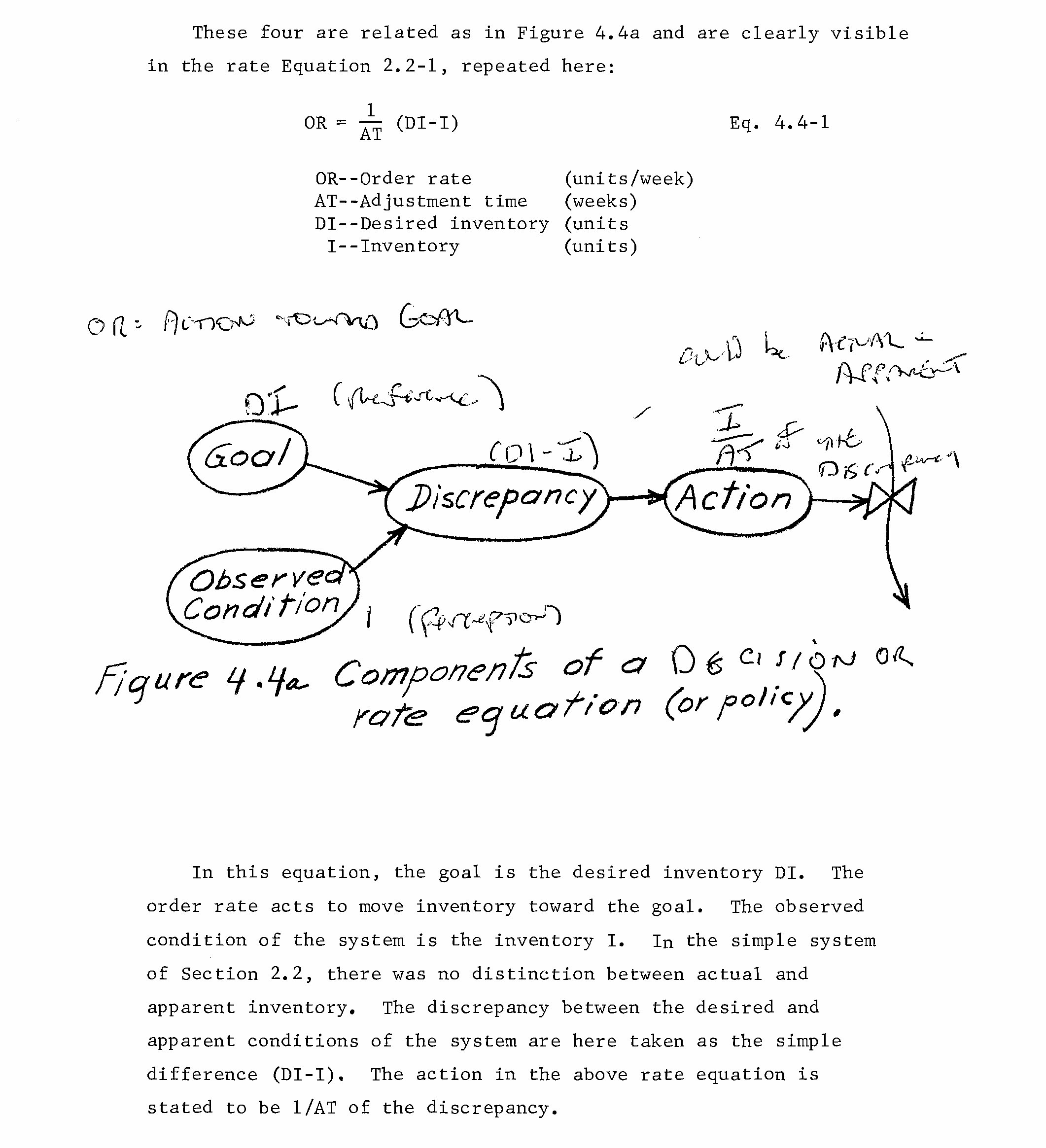
We turn now to the components of a rate equation–the sub-substructure
of a system. Four concepts are to be found within the
rate equation ( that is , a policy statement):
- A goal
- An observed condition of the system
- A way to express the discrepancy between
goal and observed condition - A statement of how action is to be based
on the discrepancy.
Pg 4-16;
Pg 4-16;
···
Principle 4.4-1. Goal, observation, discrepancy,
and action–system
sub-substructure.
A policy or rate equation recognizes a
local goal toward which that decision point
strives , compares the goal with the apparent
system condition to detect a discrepancy,
and uses the discrepancy to guide action.
Now, I don’t know about you, but this all looks very much like a control process to me, how about you? And the description’s above and below the diagram with the equation on top pretty much seals the deal
Yes folks, SD was intended to be used to model control systems. How about that. Not only that, but most current SD modelers have NO CLUE that this is in fact the case.
Jay even went out of his way to dismiss the use of differential equations, again in his own words;
Pg 6-11;
6.4 Differential Equations a Regression
Integration (or accumulation) shifts the time-character of
action, produces delays between action streams, and creates the
dynamic behavior in systems. Integration occurs naturally in both
the physical and biological worlds. The integration processes of
the real world is represented in our models by the level equations.
The level equations are first - order difference equations,
and, with a short enough solution interval , are entirely equivalent to the continuous process of integration.
But, those who have already studied some of the mathematics
of dynamic systems have almost certainly done so in terms of
differential equations rather than integral equations. Most of
the mathematics of systems, developed originally in the physical
sciences and engineering, has been cast in terms of differential
equations. Even so , the differential equation view of systems
seems to mislead many students and leaves them without a strong
linkage between the real world and the world of mathematics. For
those who have been introduced to systems by way of differential
equations, this section may explain the integral equation
emphasis of this book.
Section 6.4 is addressed primarily to those who have already
studied mathematics through differential equations.
Pg 6-12;
Formulation of systems in terms of differential equations obscure
for many students the direction of causality within systems, or , even
worse, creates intuitive feelings of reversed cause and effect relationships. For example, consider the relationships between position,
velocity, and acceleration. Thinking of velocity as the slope, or derivative , of the position versus time curve can suggest that the
changing position is responsible for the velocity rather than the other
way. The direction of causality stands more clearly when the system
description starts with the force that causes the acceleration, integrates
acceleration to produce velocity, and integrates velocity to produce position.
Representing a system in terms of integral equations gives a more
immediate and evident equivalence between the model and the real
system. Such emphasis on integration is plausible when one notes
that all the processes of nature are the processes of integration.
Nowhere in natural processes does differentiation take place. True
differentiation would depend on measuring a velocity instantaneously.
But such is not possible. All natural and man-made devices that seem
to measure velocity actually operate by a process of integration that
in some sense measures the difference between past and present
positions.
The “differential analyzer” illuminates the inescapable nature
of the process of integration. The differential analyzer is a
mechanical or electrical device for generating behavior in accordance
with a set of differential equations. But the differential analyzer
is built of integrators and, before it can be used, the differential
equations must be converted to integral equations.
Except for the reorientation imposed on those whose experience
has been entirely with differential equations, the quickest and
simplest route to understanding dynamic systems seems to be through
models depending on integration , avoiding completely the rather
artificial concept of differentiation .
So as you can see, not only is SD perfectly suited for modeling control processes, the nature of SD modeling has been grossly misunderstood.
You can of course use differential equations to model in SD, but in doing so you tend to formulate the model in a ‘cause-effect’ manner, getting away from the concepts of goals and discrepancies. This is not a ‘bad’ thing, it just provides what I think is an inferior view of the problem.
I first realized all this about six months ago.
About four years ago I helped set up a meeting between Jay Forrester and Bill Powers. George Richardson and Bob Eberlein were also in attendance. If I knew then what I know now I would have been at that meeting as well because as it turned out, neither Forrester nor Powers fully understood the others position, nor how one integrated with the other.
I asked Bob shortly afterward how the meeting went and he said it went well and that he liked Bill but found no differences in SD and PCT. Only that PCT was more ‘detailed’. He said the mathematics were identical.
I couldn’t for the life of me figure out why Bill was unable to communicate to Jay his ideas and the differences between the two, and then I realized that Bill did not know SD nor did he understand what the modeling paradigm was.
Jay on the other hand has no clue about the control of perception and SD models simply show human activity as black boxes embedded in larger systems. There are only a handful of SD modelers who work in psychology and they either utilize a behavioral or cognitive perspective.
I know Jeff Vancouver is working with SD, and Jeff if you are reading this I am working with Ralph Levine. He’d love to hear from you, give him a call.
Bill published a paper in the SD journal a number of years ago, but lost any hope of gaining any interest in PCT when he did not present his ideas in a way SD modelers would find useful, and that would be in an SD model.
So you can cry all you want about not getting any respect from anyone, but if you don’t give or show any respect, why be surprised when none is reciprocated.
I strongly recommend that anyone who might be interested in modeling control processes look into SD. Yes, you can model in practically any programming language but SD makes it so much more accessible.
You might want to get your hands on Principles of Systems from Pegasus Communications for $40.00. It is both a book and a workbook and is terrific, even if you have no intention of actually modeling but would like to know the nature of the method.
If anyone is interested in learning how to model in SD I can be talked into setting up a little intro. I am not currently a master model builder but I will
be one day and I’m good enough to do what I need to do with it.
Anyone interested?
Regards,
Marc
