Continuing the discussion from Collective control as a real-world phenomenon:
I’m starting a new topic on the phenomenon of conflict. Conflict is relevant to PCT (and vice versa) because it is an intrinsically control phenomenon. If we were not control systems we would never get into conflicts. Paradoxically, conflict occurs because we must control in order to survice and, at the same time, our controlling is what can deprive us of our ability to control. This paradoxical fact about control is the leitmotif of Tim Cary’s and my book Controlling People.
Conflict occurs when two control systems, in the same person or in two or more different people, want the same (or a very similar) perceptual variable to be in different reference states – a physical impossibility. When the conflicted control systems are in the same individual it is called an intrapersonal conflict; when they are in different individuals it is called an interpersonal conflict. The same theoretical principles apply to both types of conflict. Therefore, gaining an understanding of the nature of conflict should be of interest to both therapists, who deal mainly with intrapersonal conflict, and other social scientists (economists, political scientists, etc), who deal mainly with interpersonal conflict.
PCT provides the theoretical explanation of conflict and it makes some interesting (and somewhat surprising) predictions about what happens when there is conflict between control systems. The prediction that is currently of most interest to me is the phenomenon of a Dead Zone. The Dead Zone is the range of values between the references of the conflicted systems for the state of a controlled variable. Disturbances to the controlled variable that occur within this range are completely effective; there is no control in the Dead Zone.
The Dead Zone is demonstrated in a spreadsheet model that I’ve developed that can be found here. This is an improved version of my original model because it can take into account the fact that the contestants in a conflict can get fatigued. Fatigue is an important consideration in conflict because the Dead Zone exists when the conflicted control systems are producing maximum output. And we know that real organisms cannot continuously exert maximum output because their ability to produce output fatigues.
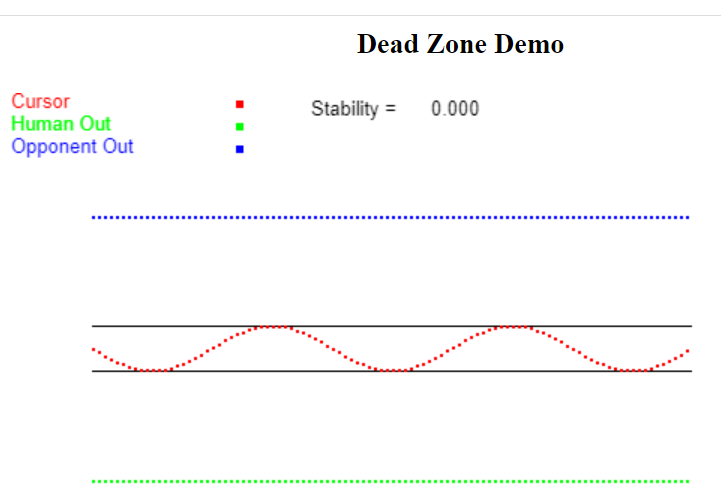
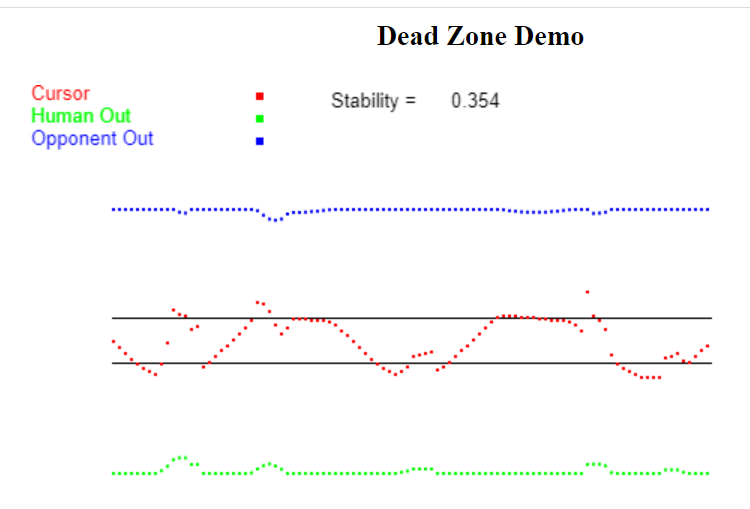
In my earlier models, when the conflicted systems go to maxumum output they simply stay at that level of output until the end of a simulation run. In that case, the Dead Zone is easy to see; dusturbances in this zone are completely effective and measures of control of the variable in conflict show that there is no control at all. But the Dead Zone should be less obvious if output fatigue were taken into account, and this new version of the spreadsheet model shows that this is the case.
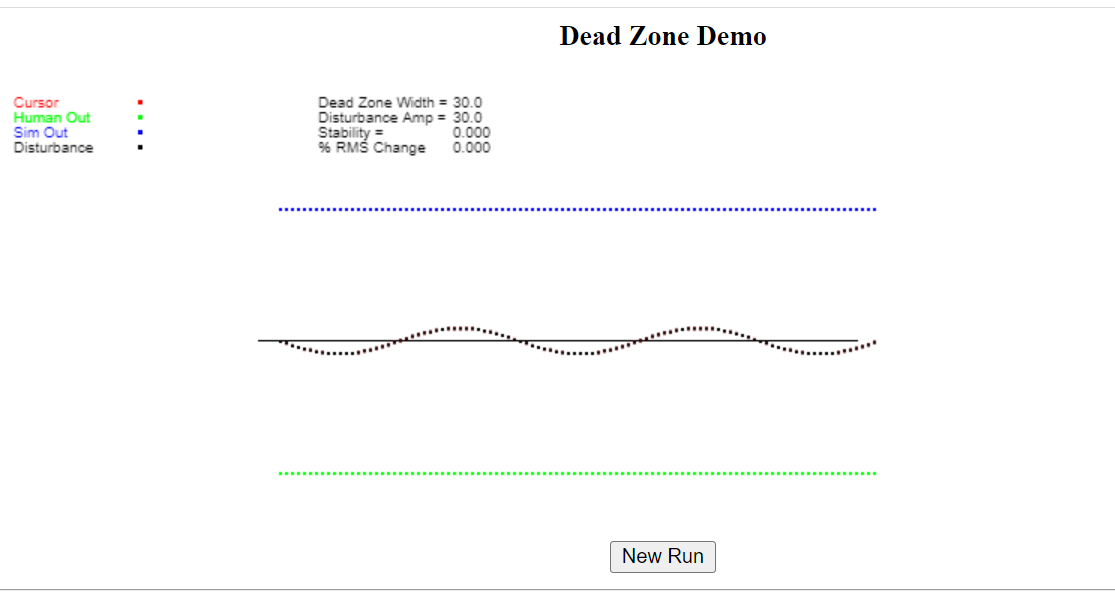
Here’s a screenshot of the new spreadsheet:
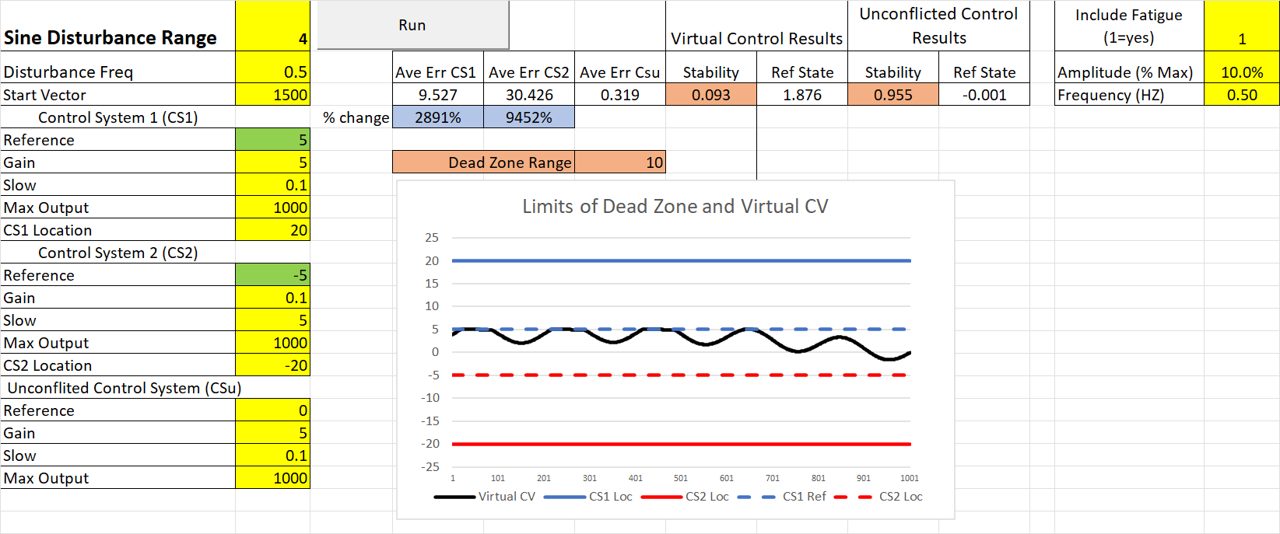
The main addition is the cell in the upper right labeled “Include Fatigue”. You can toggle in the Fatigue factor by entering 1 in the yellow cell to the right and you can toggle it out by setting that cell to 0.
When you open the spreadsheet the Fatigue Factor is toggled in. The Fatigue Factor is modeled as narrow band filtered noise that is always negative so that adding it to the nominal maximum output always lowers that maximum. The amplitude of this noise can be set as a percentage of the maximum output value of each system. On opening the spreadsheet this amplitude is set to 10%. The center frequency of the noise can also be set; on opening it is set to .5 H; fatigue is assumed here to vary relatively slowly in this 20 second run.
The two systems in conflict – CS1 (location shown by solid blue line) and CS2 (location shown by solid red line) – are trying to bring a variable (shown as a solid black line) to different reference states: CS1 is trying to get the variable 5 units into its territory (dashed blue line in the figure) and CS2 is trying to get the flag 5 units into its territory (dashed red line).
The size of the Dead Zone in this simulation is 10 units, which is the difference between CS1’s and CS2’s references states (dashed lines) for the controlled variable. The amplitude of the disturbance to the controlled variable is 4, which is well within the Dead Zone, therefore the Stability measure of control should be 0.0. And it would be 0.0 if it were not for the variations in Fatigue. These variations bring the Stability measure of control up to .093. This is not very good control (1.0 is perfect control) but it’s not 0.0, which it would be if there were no fatigue – a fact that you can check out for yourself by toggling the “Include Fatigue” cell to 0 and clicking “Run”.
You can experiment around with this model and see how assumptions about the amplitude and frequency of variations in Fatigue affect the measure of control (Stability Factor) when disturbances fall within the Dead Zone.
The simulation is, of course, only theoretical. The next step is to see whether what happens in the simulation happens in reality. I have some ideas about how to test this but I’ll wait to describe them in a later post. For now, I’d be interested in your thoughts about the Dead Zone and its implications for resolving intra- and/or intrapersonal conflicts.