···
[Martin Taylor 2016.07.01.13.01] Canada Day
MT: I find your comments quite mystifying. I thought I understood why
you have not understood the concept of an atenfel, but I fear that
the problem lies even deeper than I had imagined. For a
quarter-century, I have thought that we had the same idea about the
basics of PCT,
RM: I think we agree about some of the basics and disagree about others.
MT: but I'm beginning to think that maybe we don't. Let's
see if we can converge on a problem that is not simply wordsmithing.
RM: OK.
MT: You almost defined an atenfel ("the variable means that are used to
control [higher level] perceptions"), but then you deny it by saying
that the means by which the output of a control unit influences the
perception are not part of the environmental feedback path. I find
this very strange. Perhaps we can limit this part of the discussion
to that one point.
RM: I said that? If so, maybe I was referring to the outputs from a higher level system in a control hierarchy that contribute to the references for lower level control systems. The outputs of the lowest level control systems – the outputs that drive the muscles and glands – are definitely part of the environmental feedback function…
MT: My question now is what parts of the connection between output and
perceptual input of any one elementary control unit you consider to
be part of its environmental feedback path, what parts of the
connection you do not consider to be part of its environmental
feedback path, and why are those parts classified in one way rather
than the other?
RM: As I said above, the only outputs I consider to be part of the connection between output and controlled input are those that connect directly to the muscles and glands. I see why you could say that there is a hierarchy of control systems in the feedback path between a higher level system’s output and the perception controlled by that higher level system. But I would not count that hierarchy of control systems as part of the environmental feedback path. The only environmental feedback path, from my perspective, is the one that goes through the environment.
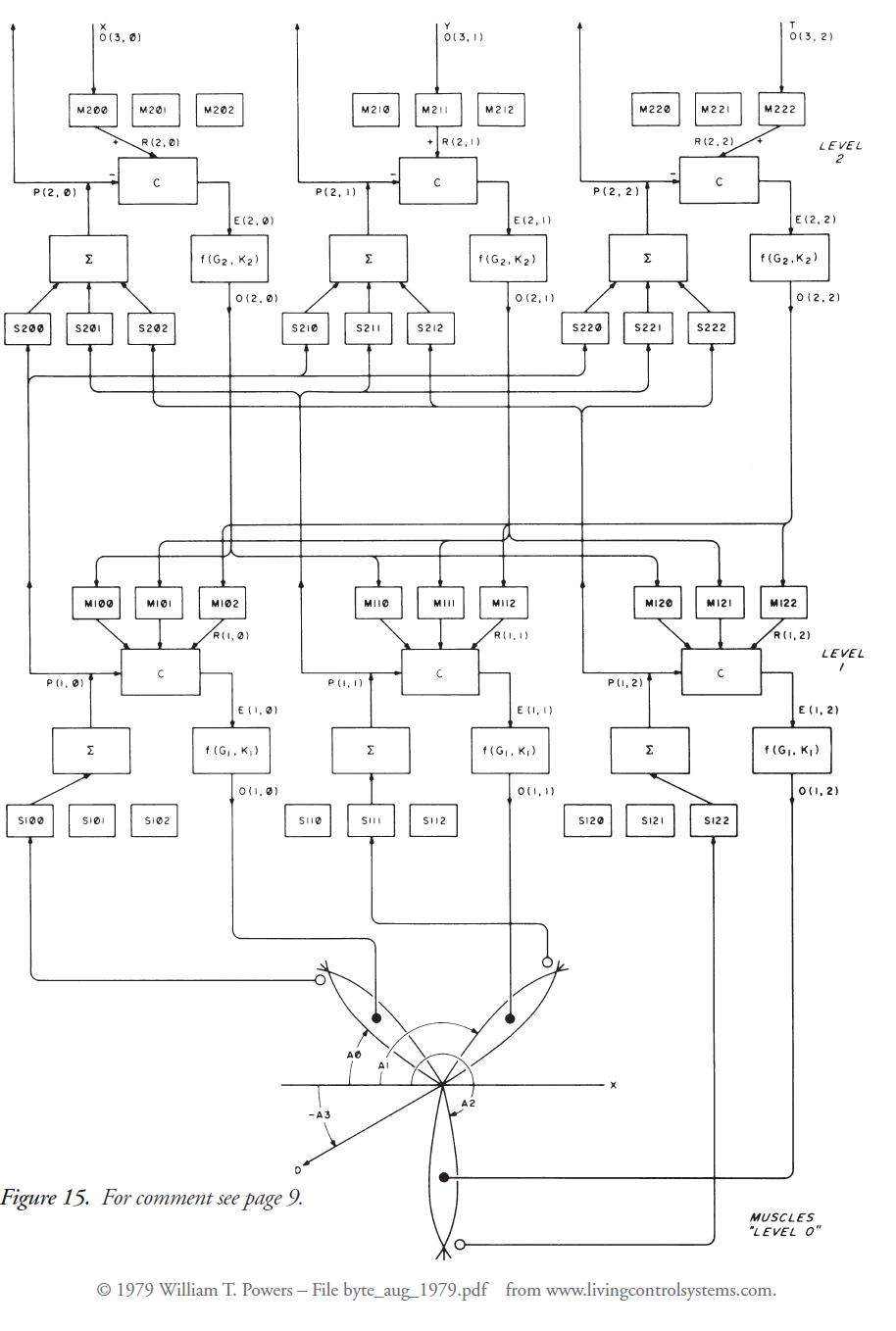
RM: Maybe my point can be made more clearly using a diagram, this one from Bill 4th Byte article.
What we have here is a two level control hierarchy controlling the perception of the forces exerted by the three muscles at the bottom of the diagram – the muscles being the environment of the control system. The top level systems are controlling the perception of the direction of force (force exerted by all three muscles in the X and Y direction) as well as the perception of the total force exerted by the muscles together (muscle tonus). They do this by varying the outputs they send to the lower level systems that are controlling the force generated by a muscle.
RM: Looking at just the top control system on the left, which happens to be controlling a perception of force exerted in the X direction, you would apparently say that the feedback function is everything between the output of that system and the perception of the direction of force that this system controls. So this would include the three lower level systems that are the means used by the X direction control system to control the direction of force; it would also include the muscles in the environment that convert the outputs of the lower level systems into the perceptual inputs controlled by both the lower systems and the higher level X direction control systems.
RM: Where we differ, apparently, is that you consider the lower level control systems to be part of the environmental feedback path connecting the output of the higher level X direction control system to its controlled input.I don’t because those systems are not in the environment. And also because any links that exist between output and input in an environmental feedback path cannot be varied by the system controlling that input; for example, the links between the forces exerted on the steering wheel and the direction of your car (and there are many) cannot be varied by the system steering the car. However, it is possible to vary the lower level control systems (in terms of the references for the perceptions they control) that are in the feedback path between a higher level system and the perception it controls.
RM: So the role of lower level systems in the feedback path between higher level system outputs and the perceptions they control is quite different than the role of the environmental components of that feedback path. Also, only the components of the environmental feedback path can be manipulated from outside the system. The control systems inside the organism that are part of the feedback path but not part of the environmental feedback path are not accessible from outside the system.
RM: So it seems to me that what you are calling “atenfels” may already exist in the PCT model as the lower level control systems that are the means by which higher levels systems achieve their goals. If this is true, then “atenfels” can be seen as components of the feedback path between a higher level system’s output and its controlled input. But they are not part of the environmental feedback function.
RM: If I have that wrong, perhaps you could use the diagram of the two level hierarchy above to show me where the atenfels are.
Best
Rick
Much seems to hinge on your answer, especially your reasons.
Martin
–
Richard S. Marken
“The childhood of the human race is far from over. We
have a long way to go before most people will understand that what they do for
others is just as important to their well-being as what they do for
themselves.” – William T. Powers
MT: You say that you
do not like to think of the environmental feedback path
(EFP) of a control unit as including the parts of the
hierarchy below that control process.
RM: Correct. I prefer to think of them as the variable
means that are used to control higher level perceptions.
MT: For you the EFP
starts and ends at the organism’s skin, and in that
external part of the path between the unit’s output and
its input there exist no control processes or other
feedback loops – only passive physical connectors.
RM: None that are part of the behaving system itself,
true.
MT: To you,
apparently it matters not whether someone has stolen
your bicycle, because the environmental feedback
function involving walking or driving still allows you
to control your perception of location.
RM: I think you see the bicycle as part of the
environmental feedback function that connects an actor’s
outputs to her perceptual goal – her destination. I see
the bicycle as a set of perceptual variables that, when
controlled properly, get the actor to her destination. For
example, one variable that must be controlled is the
forward movement of the bike. This variable is controlled
by means of controlling for rotation of the pedals and for
a balanced bike (among other things). The pedals are
rotated by exerting the appropriate forces on them. The
force required to produce the perception of rotation
depends on the physical laws (the feedback function) that
relate the force applied to the pedals to the perception
of pedal movement. At a higher level, the perception of
forward movement depends on the physical laws (the
feedback function) that relate pedal rotation rate to the
perception of forward motion.
RM: Stealing a bike certainly removes the feedback
functions, such as those mentioned above – between output
force and pedal movement and between pedal movement and
forward movement of the bike. But I see the loss of the
feedback functions as resulting from the loss of variables
to control. Stealing the bike seems to me to be a
disturbance - a pretty overwhelming one – to the
variables you control when riding the bike to a
destination; those variables – pedal rotation, balance,
forward motion – are no longer there for you to control
(except in imagination). So there is no longer a physical
feedback connection between your output (force applied to
the no longer present pedals) and those perceptual
variables.
RM: So I see stealing a bike as an example of an
interpersonal conflict, where two people (the thief and
the owner) want the same variables (the variable aspects
of the bike) in different reference states. I think the
existing PCT model, sans atenfels, can handle this kind of
social interaction just fine.
RM: I think it is far more important (and productive)
to test to see how well the existing PCT model can explain
data, such as data on interpersonal interactions, before
inventing new theoretical constructs to explain anecdotes.
And in order to do this you have to collect data to test
the model against.
Best
Rick
–
Richard S. Marken
"The childhood of the human
race is far from over. We
have a long way to go before
most people will understand that
what they do for
others is just as important to
their well-being as what they do
for
themselves." – William T.
Powers