Ah, I had a printout of that paper on my large pile of PCT papers,
so I must have read it in the past; I’ve done so again.
Ok, I appreciate that the TCV has the potential to determine the
intentions of others; that they are intentional beings, and the
observer has a “ToM”.
I see a few difficulties extending this to autonomous vehicles.
Could the autonomous vehicle carry out the TCV? Or would prior
research need to be done to determine intentions in different
situations; such as whether another road user has made eye
contact or not? Could the TCV be carried out in a passive way,
as you described with the object interception, by monitoring the
behaviour of human drivers?
I would imagine that there are quite sophisticated and maybe
abstract intentions that drivers and other road users have. How
could these be hypothesised and determined? Has any previous
work been done on the psychology of driving?
Once the intentions of other road users have been determined
what perceptions, that represent the relationship between the
vehicle and the intentions of the road user, would the
autonomous vehicle control?
Any thoughts?
Regards,
Rupert
···
Rupert Young
(2017.12.30 23.00)
RY: What is the PCT take on "Theory of Mind" ([https://en.wikipedia.org/wiki/Theory_of_mind](https://urldefense.proofpoint.com/v2/url?u=https-3A__en.wikipedia.org_wiki_Theory-5Fof-5Fmind&d=DwMDaQ&c=8hUWFZcy2Z-Za5rBPlktOQ&r=-dJBNItYEMOLt6aj_KjGi2LMO_Q8QB-ZzxIZIF8DGyQ&m=hIxHLarj3tJ_GmFiuBbEmfI2W3TJi61B757A0oOWFkI&s=xJCyCVzfqIBhbj-7ciNMCWCDlL_rM-o7fMSuKKlIZgg&e=))?
RM: Well, what a coincidence! Another paper --
reprinted in different book of mine - happens to be an
answer to exactly that question. The paper is called
"Making Inferences About Intention: “Perceptual Control
Theory as a “Theory of Mind” For Psychologists” and it is
reprinted in Doing Research on Purpose (pp. 57-78).
Also, Dave Premack, who wrote the seminal paper on Theory
of Mind, was one of my professors in graduate school. Dave
was a big time Skinnerian so I was surprised to find (many
years after I got me PhD) that he wrote a paper on Theory
of Mind since Skinnerians aren’t really big on the
existence of the mind (perhaps from their experience with
not having one themselves;-) But Dave was a very bright
guy so I guess he was an exception. At the time I knew
him he was working on teaching a chimp named Sarah to talk
using plastic shapes as words. I was good friends with
Mary, the lady who was Sarah’s teacher. My adviser, who
was also good friends with Mary, would occasionally leave
pornographic notes in chimp chip language in the office
for her. So I was also involved in the development of some
pioneering work that would be especially relevant to the
current leadership of our country: undetectable sexual
harassment.
RY: I am thinking in
terms of what an autonomous vehicle would need to perceive
in order to control relative to the intentions of other
road users.
RY: Ok, I appreciate that the TCV has the potential to determine the
intentions of others; that they are intentional beings, and the
observer has a “ToM”.
RY: I see a few difficulties extending this to autonomous vehicles.
Could the autonomous vehicle carry out the TCV? Or would prior
research need to be done to determine intentions in different
situations; such as whether another road user has made eye
contact or not? Could the TCV be carried out in a passive way,
as you described with the object interception, by monitoring the
behaviour of human drivers?
I would imagine that there are quite sophisticated and maybe
abstract intentions that drivers and other road users have. How
could these be hypothesised and determined? Has any previous
work been done on the psychology of driving?
Once the intentions of other road users have been determined
what perceptions, that represent the relationship between the
vehicle and the intentions of the road user, would the
autonomous vehicle control?
RY: Any thoughts?
RM: I think it is highly unlikely that the performance of autonomous vehicles will be improved by giving them the ability to read the intentions of other drivers. First, for the reasons you give above, I think it would be impossible to build a machine that accurately reads the intentions of other drivers in real time. Second, I don’t think human drivers do this, at least not accurately. And they don’t need to in order to be good drivers (just as people don’t need to be able to predict disturbances in order to control well); all they have to do is control the right variables. For example, a human driver doesn’t have to be able to tell whether the kid on the side of the street intends to bolt into the street; she just has to know that he might. So the driver just has to be able to control a program perception; if kid near curb then slow down and prepare to stop else don’t.Â
Â
RM: The point of my Theory of Mind paper is that, while people do understand the behavior of others in terms of inferences about their intentions, these inferences are not particularly accurate. But there is a way to be accurate about inferring people intentions – a scientific method for doing this called the TCV, which is based on a control theory model of behavior . But the TCV will only be accurate if carried out using rigorous scientific methods, which is impossible to do while driving in the real world. So the conclusion I would come to based on my Theory of Mind paper is to forget about improving autonomous vehicle performance by giving these vehicles the ability to read minds; the path to improved autonomous vehicle performance is to figure out what higher level perceptions skillful drivers control and then give the vehicles the ability to compute and control these perceptions.
reprinted in different book of mine - happens to be an
answer to exactly that question. The paper is called
"Making Inferences About Intention: "Perceptual Control
Theory as a “Theory of Mind"Â For Psychologists” and it is
reprinted in Doing Research on Purpose (pp. 57-78).Â
BestÂ
Rick
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
I certainly agree with you about higher level perceptions. It would
be good to determine what they are, as I don’t think the industry is
taking them into account.
With regards to the intentions of other road users, I am not so
sure, I just don’t know. However, I can think of a few potential
scenarios where you would do different things based on an estimation
of intentionality. If an old tire was rolling towards the road you
would slow down to avoid it, as you could be sure it has no
intention to stop. If it was a child you’d be less sure, but, as you
say, you’d probably slow down to be on the safe side. But if the
child was running towards an adult with open arms you probably not
slow down, as you reckon on different intentions. And how about making eye contact with a pedestrian? Do we not act
differently depending on whether or not we have made eye contact,
and assume different intentions?
Or are these just high-level perceptions?
Regards,
Rupert
···
RY: I see a few difficulties
extending this to autonomous vehicles. …
RY: Any thoughts?
RM: I think it is highly unlikely that the performance
of autonomous vehicles will be improved by giving them the
ability to read the intentions of other drivers. First,
for the reasons you give above, I think it would be
impossible to build a machine that accurately reads the
intentions of other drivers in real time. Second, I don’t
think human drivers do this, at least not accurately. And
they don’t need to in order to be good drivers (just as
people don’t need to be able to predict disturbances in
order to control well); all they have to do is control the
right variables. For example, a human driver doesn’t have
to be able to tell whether the kid on the side of the
street intends to bolt into the street; she just has to
know that he might. So the driver just has to be able to
control a program perception; if kid near curb then slow
down and prepare to stop else don’t.
RM: The point of my Theory of Mind paper is that, while people
do understand the behavior of others in terms of inferences
about their intentions, these inferences are not particularly
accurate. But there is a way to be accurate about inferring
people intentions – a scientific method for doing this called
the TCV, which is based on a control theory model of
behavior . But the TCV will only be accurate if carried out
using rigorous scientific methods, which is impossible to do
while driving in the real world. So the conclusion I would
come to based on my Theory of Mind paper is to forget about
improving autonomous vehicle performance by giving these
vehicles the ability to read minds; the path to improved
autonomous vehicle performance is to figure out what higher
level perceptions skillful drivers control and then give the
vehicles the ability to compute and control these perceptions.
RY: With regards to the intentions of other road users, I am not so
sure, I just don’t know. However, I can think of a few potential
scenarios where you would do different things based on an estimation
of intentionality.
RM: Sure, we do different things based on estimates of the intentionality of others. But this based only on anecdotal evidence (from personal experience yet) and my experience is that my estimates of the intentionality of others are just as often right as wrong. So they have little to do with why I am such a skillful driver. The reason I drive so well (on either side of the car; I once flew into London and picked up a right side steering wheel, stick shift rental car while jet lagged and drove to our hotel in southern London just like I was a descendant of William the Conqueror rather than King David;-) is because I can skillfully control all those lower level variables (position of car relative to lane, etc) but also higher level ones (such as “drive defensively”).Â
Perhaps we could improve driving safety with an “intention detection system” that was completely accurate. But I think that such a system is a LONG way off. So I would look to improving driving by looking for the higher level perceptions that, when controlled, would result in safer driving.Â
BestÂ
Rick
Â
If an old tire was rolling towards the road you
would slow down to avoid it, as you could be sure it has no
intention to stop. If it was a child you’d be less sure, but, as you
say, you’d probably slow down to be on the safe side. But if the
child was running towards an adult with open arms you probably not
slow down, as you reckon on different intentions.
And how about making eye contact with a pedestrian? Do we not act
differently depending on whether or not we have made eye contact,
and assume different intentions?
Or are these just high-level perceptions?
Regards,
Rupert
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
From: Richard Marken [mailto:rsmarken@gmail.com] Sent: Friday, January 5, 2018 11:53 AM To: csgnet@lists.illinois.edu Subject: Re: Theory of Mind
[From Rick Marken (2018.01.05.0850)]
Rupert Young (2018.01.03 20.20)
RY: With regards to the intentions of other road users, I am not so sure, I just don’t know. However, I can think of a few potential scenarios where you would do different things based on an estimation of intentionality.
RM: Sure, we do different things based on estimates of the intentionality of others. But this based only on anecdotal evidence (from personal experience yet) and my experience is that my estimates of the intentionality of others are just as often right as wrong. So they have little to do with why I am such a skillful driver. The reason I drive so well (on either side of the car; I once flew into London and picked up a right side steering wheel, stick shift rental car while jet lagged and drove to our hotel in southern London just like I was a descendant of William the Conqueror rather than King David;-) is because I can skillfully control all those lower level variables (position of car relative to lane, etc) but also higher level ones (such as “drive defensively”).
Perhaps we could improve driving safety with an “intention detection system” that was completely accurate. But I think that such a system is a LONG way off. So I would look to improving driving by looking for the higher level perceptions that, when controlled, would result in safer driving.
[FWN] FWIW, I think there already higher levels perceptions that, if controlled, would result in safer driving (e.g., obeying speed limits and other traffic laws, rules and regulations; not taking unnecessary risks; respecting the safety of others; etc., etc. The issue is one of getting people to control for these. Perhaps there is some still higher level that determines that.
Best
Rick
If an old tire was rolling towards the road you would slow down to avoid it, as you could be sure it has no intention to stop. If it was a child you’d be less sure, but, as you say, you’d probably slow down to be on the safe side. But if the child was running towards an adult with open arms you probably not slow down, as you reckon on different intentions.
And how about making eye contact with a pedestrian? Do we not act differently depending on whether or not we have made eye contact, and assume different intentions?
Or are these just high-level perceptions?
Regards,
Rupert
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
[FWN] FWIW, I think there already higher levels perceptions that, if controlled, would result in safer driving (e.g., obeying speed limits and other traffic laws, rules and regulations; not taking unnecessary risks; respecting the safety of others; etc., etc. The issue is one of getting people to control for these. Perhaps there is some still higher level that determines that.
RM: Yes, of course. And the reference for the lower level “rule” perceptions control systems should (according to PCT) be set by the higher level “principle” perception control systems. So, for example, the reference for the system controlling for the rule “obey the speed limit” should be set by the system controlling for the principle “don’t take unnecessary risks”. That’s because, in order to keep the principle at at it’s reference (“don’t” rather than “do”) you may have to change the reference for “obey the speed limit” from “obey” to “exceed”.Â
Best
Rick
Â
BestÂ
Â
Rick
Â
If an old tire was rolling towards the road you would slow down to avoid it, as you could be sure it has no intention to stop. If it was a child you’d be less sure, but, as you say, you’d probably slow down to be on the safe side. But if the child was running towards an adult with open arms you probably not slow down, as you reckon on different intentions.
And how about making eye contact with a pedestrian? Do we not act differently depending on whether or not we have made eye contact, and assume different intentions?
Or are these just high-level perceptions?
Regards,
Rupert
Â
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
Sure, but there is a great deal of knowledge and experience in those
high levels perceptions, and a lot of complexities involved in their
acquisition. My challenge is to work out what those perceptions are
and how to represent and embody corresponding control systems within
artificial agents. At the moment I just don’t see that the
definition of the PCT architecture is detailed enough to do that.
Well, I wasn’t really thinking of a real-time “intention detection
system”, but that the higher level perceptions we use include
knowledge of possible intentions of others. My sister told me that
in her driving test she saw teenagers get off a bus, then as she
drove passed she slowed down even though she couldn’t see behind the
bus. Sure enough a teenager walked out from behind the bus and an
accident was avoided.
So, I’d like to figure out what high level perceptions (intentions
or not) drivers employ, and how they would make sense in a PCT
context.
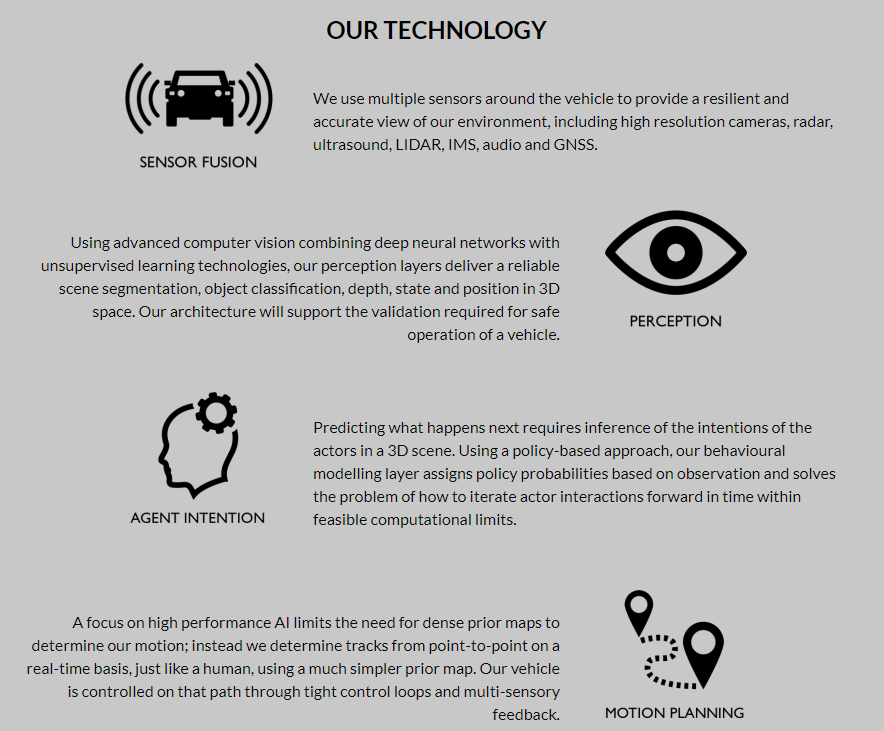
Here is the technology described by the startup who are trying to develop autonomous vehicles at the top level (5)
of autonomy. They are looking at the inference of intentions and
other perceptions. I am wondering what PCT can contribute to this
effort.
Regards,
Rupert
RY: With regards to the intentions of other road users,
I am not so sure, I just don’t know. However, I can
think of a few potential scenarios where you would do
different things based on an estimation of
intentionality.
RM: Sure, we do different things based on estimates of
the intentionality of others. But this based only on
anecdotal evidence (from personal experience yet) and my
experience is that my estimates of the intentionality of
others are just as often right as wrong. So they have
little to do with why I am such a skillful driver. The
reason I drive so well (on either side of the car; I once
flew into London and picked up a right side steering
wheel, stick shift rental car while jet lagged and drove
to our hotel in southern London just like I was a
descendant of William the Conqueror rather than King
David;-) is because I can skillfully control all those
lower level variables (position of car relative to lane,
etc) but also higher level ones (such as “drive
defensively”).
Perhaps we could improve driving safety with an
“intention detection system” that was completely accurate.
But I think that such a system is a LONG way off. So I
would look to improving driving by looking for the higher
level perceptions that, when controlled, would result in
safer driving.
RM: Well, what a coincidence! Another paper – reprinted in different book of mine - happens to be an answer to exactly that question. The paper is called "Making Inferences About Intention: "Perceptual Control Theory as a “Theory of Mind" For Psychologists” and it is reprinted in Doing Research on Purpose (pp. 57-78). Also, Dave Premack, who wrote the seminal paper on Theory of Mind, was one of my professors in graduate school. Dave was a big time Skinnerian so I was surprised to find (many years after I got me PhD) that he wrote a paper on Theory of Mind since Skinnerians aren’t really big on the existence of the mind (perhaps from their experience with not having one themselves;-) But Dave was a very bright guy so I guess he was an exception. At the time I knew him he was working on teaching a chimp named Sarah to talk using plastic shapes as words. I was good friends with Mary, the lady who was Sarah’s teacher. My adviser, who was also good friends with Mary, would occasionally leave pornographic notes in chimp chip language in the office for her. So I was also involved in the development of some pioneering work that would be especially relevant to the current leadership of our country: undetectable sexual harassment.
RY: I am thinking in terms of what an autonomous vehicle would need to perceive in order to control relative to the intentions of other road users.
 RM: Well, read my paper and see what you think.Â
BestÂ
Rick
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
What perceptual input functions and other control structures develop between ca. age 2 and age 4 as ToM emerges? This is almost entirely after the developmental sequence that the Plooijs investigated and documented, that is, after the levels that we understand are in place.
···
On Sat, Dec 30, 2017 at 9:24 PM, Richard Marken rsmarken@gmail.com wrote:
RM: Well, what a coincidence! Another paper – reprinted in different book of mine - happens to be an answer to exactly that question. The paper is called "Making Inferences About Intention: "Perceptual Control Theory as a “Theory of Mind" For Psychologists” and it is reprinted in Doing Research on Purpose (pp. 57-78). Also, Dave Premack, who wrote the seminal paper on Theory of Mind, was one of my professors in graduate school. Dave was a big time Skinnerian so I was surprised to find (many years after I got me PhD) that he wrote a paper on Theory of Mind since Skinnerians aren’t really big on the existence of the mind (perhaps from their experience with not having one themselves;-) But Dave was a very bright guy so I guess he was an exception. At the time I knew him he was working on teaching a chimp named Sarah to talk using plastic shapes as words. I was good friends with Mary, the lady who was Sarah’s teacher. My adviser, who was also good friends with Mary, would occasionally leave pornographic notes in chimp chip language in the office for her. So I was also involved in the development of some pioneering work that would be especially relevant to the current leadership of our country: undetectable sexual harassment.
RY: I am thinking in terms of what an autonomous vehicle would need to perceive in order to control relative to the intentions of other road users.
 RM: Well, read my paper and see what you think.Â
BestÂ
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
With the advent of smart devices infants and toddlers and others now access, it’s my view extant developmental theories regarding so-called shifts will need to be re-framed from hitherto unseen and unrecorded facts.
It’ll be an exciting time.
Happy NY everybody.
Cheers
JohnK
···
On Sun, Dec 31, 2017 at 4:26 PM, Bruce Nevin bnhpct@gmail.com wrote:
[From Bruce Nevin (2017.12.30.22:22 ET)]
What perceptual input functions and other control structures develop between ca. age 2 and age 4 as ToM emerges? This is almost entirely after the developmental sequence that the Plooijs investigated and documented, that is, after the levels that we understand are in place.
On Sat, Dec 30, 2017 at 9:24 PM, Richard Marken rsmarken@gmail.com wrote:
RM: Well, what a coincidence! Another paper – reprinted in different book of mine - happens to be an answer to exactly that question. The paper is called "Making Inferences About Intention: "Perceptual Control Theory as a “Theory of Mind" For Psychologists” and it is reprinted in Doing Research on Purpose (pp. 57-78). Also, Dave Premack, who wrote the seminal paper on Theory of Mind, was one of my professors in graduate school. Dave was a big time Skinnerian so I was surprised to find (many years after I got me PhD) that he wrote a paper on Theory of Mind since Skinnerians aren’t really big on the existence of the mind (perhaps from their experience with not having one themselves;-) But Dave was a very bright guy so I guess he was an exception. At the time I knew him he was working on teaching a chimp named Sarah to talk using plastic shapes as words. I was good friends with Mary, the lady who was Sarah’s teacher. My adviser, who was also good friends with Mary, would occasionally leave pornographic notes in chimp chip language in the office for her. So I was also involved in the development of some pioneering work that would be especially relevant to the current leadership of our country: undetectable sexual harassment.
RY: I am thinking in terms of what an autonomous vehicle would need to perceive in order to control relative to the intentions of other road users.
 RM: Well, read my paper and see what you think.Â
BestÂ
Rick
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery