[Martin Taylor 2017.10.26.10.47]
For a moment I'd like to leave the world of single control loops and
arguments about whether there is anything really “out there” that we
can perceive. Instead, I want to talk about a couple of emergent
properties of clusters of control loops, perhaps hierarchically
arranged, both of which depend on conflict to enhance the strength
and resilience of complex control systems.
What is an "emergent property"? The Wikipedia article on "Emergence"
defines it thus: "In philosophy**, systems theory**, science* ,
and* art**, emergence * is a
phenomenon whereby larger entities arise through interactions
among smaller or simpler entities such that the larger entities
exhibit properties the smaller/simpler entities do not exhibit.* "
That is also the definition I use, according to which “control” is
an emergent property of a particular structure of some specific
basic functions (which we call perceptual, comparator, and output
functions).
In this message I will talk about an emergent property that in
living organisms is dependant on control, which I call “stiffness”.
In a later message, I will talk about another emergent property
commonly known as “tensegrity”. Tensegrity depends on stiffness.
Both stiffness and tensegrity can exist in non-living structures,
and I will refer to the non-living versions as guides to the
stiffness and tensegrity properties of complexes of control loops.
But this message is quite long enough dealing with stiffness, and
the tensegrity properties of control loop complexes are conceptually
trickier, so their discussion can be delayed.
**Stiffness and opposition**
Since the subject line of this message includes the word
“opposition”, that must be defined as it is used here. I use
opposition as a variant of the PCT definition of conflict, that it
exists when N >1 control units try to bring their perceptions of
M<N environmental properties to their individual different
reference values. The classic case demonstrated by Kent McClelland’s
presentation at CSG-93 is of two control systems trying to bring one
CEV to their two different reference values, the result being that
if the TCV is applied to the CEV, it seems to be being controlled to
an intermediate reference value by a controller with a gain that is
the sum of the gains of the conflicted control systems.
The conflict cannot be seen by a Tester doing the Test for the
controlled variable. To see the conflict requires a wider view that
compares what the control systems seem to be trying to do, as in the
case of someone observing a tug-of-war at a country fair. What the
tester sees is a strongly controlled property of the environment,
say the location of the handkerchief tied in the middle of the
tug-of-war rope.
Some time ago we had a thread about whether Bill's action to disturb
Dag’s control of the steering wheel angle constituted a conflict
between Bill and Dag, which according to the definition above it
does not. But Dag’s output force that countered Bill’s disturbance
is an opposition to Bill’s force. Together these forces bring the
steering wheel to an angle that keeps the car in the place in its
lane where Dag wants it to be.
Lost in this view of the situation is another property of the
handkerchief in the tug-of-war, its location perpendicular to the
axis along which the two teams are pulling. Let’s call their pulling
axis “X”, so that one team pulls in the +X direction while the other
pulls in the -X direction. If you apply a force to the handkerchief
in the Y direction or the Z direction, it will resist in the same
way as would a spring, snapping back to its original location when
the perpendicular force is removed. The stronger the two teams, the
stronger the apparent spring, and the more secure is the
handkerchief in the Y and Z directions, no matter who wins the
tug-of-war, provided the teams pull only along the X axis direction.
Think what has happened here. Control has been used to produce
stability in a property that is not controlled. This “stiffness” is
an emergent property of control conflict. It cannot exist without at
least two pulls in opposite directions.
Of course if the teams are standing on a platform that moves freely
in the Y direction, they, the rope, and the handkerchief all will
move in Y when a Y-direction force is applied to the handkerchief
and the spring-like effect will not be observed. But if the teams do
not move so easily in Y, the rope in tension will resist the Y-force
on the handkerchief, which will spring back when the force is
removed. [Aside: here we have a hint about tensegrity effects in
control. But that is for a later message.]
The pulls does not need to be caused by two control systems, since
the same thing happens when one pulls a rope attached to a rock, nor
does it need even one control system, since it would be true of a
cable staying the boom of a crane, or a vine that prevents a falling
tree from falling all the way to the ground. Stiffness is a purely
physical property that can exist in accidentally constructed
physical systems without control. Nevertheless, stiffness does
emerge from control opposition, and that opposition need not be in
just one dimension.
Think of a bunch of people holding a blanket to catch someone
jumping from a burning building. If they all pull moderately hard,
the person will probably be safe. If they pull too loosely, the
person will hit the ground almost as hard as if the blanket was not
there. If they pull too hard, the blanket will be as stiff as the
ground and the person again risks serious damage. The people are
pulling against each other in various directions in one
two-dimensional plane, and the stiffness in the direction
perpendicular to the plane is what protects the falling person by
its “spring-like” effects while the pulling people are anchored to
the fixed ground.
The pullers collectively control the X-Y location of the blanket so
that it will be under the falling person, so they all have the same
reference value for its location and they should not be in conflict.
However, the location isn’t the only thing that affects the survival
of the falling person, and the pullers are controlling for the
person to survive. For the person to survive, the blanket must be
stiff but not too stiff, which means that at some level the pullers
must control for sufficient opposition to exist among their
different pulls. They must therefore be able to perceive either the
opposition or something highly correlated with the opposition, such
as the blanket’s stiffness. Whether or not they perceive and control
the magnitude of the opposition, the opposition is necessary for
them to save the falling person.
We use "stiffness" or the opposition associated with it in much more
mundane circumstances. imagine holding a small parade flag up with
one hand. If it is a calm day your arms will be quite relaxed,
tensors and extensors applying equal but small opposing forces. If
the wind starts getting stronger, all your muscles become tenser,
creating stronger opposition between tensors and extensors. If the
wind is gusty and in erratic directions, your muscle tensions
increase even more. You use that opposition to make the orientation
of the flagstaff stiffer, easing your control. As we will see, this
increased stiffness is associated with an automatic increase in the
effective gain of the flag orientation control unit. [Aside:
Increased gain can lead to oscillatory instability in a control
loop. Might this be the underlying cause of “intentional tremor”?]
Can stiffness due to conflict be used for internal purposes as well
as in the external environment? Perhaps, but whether it is useful is
another question. The Method of Levels is predicated on the idea
that all conflict is bad, and reducing or removing it is good. I
hazard a guess that this may overstate the case, and that some
opposition, which is easily confused with conflict, serves to
stabilize a personality. “Good” and “bad” being subjective
perceptions, I suggest that it may not be conflict or internal
opposition that is the problem, so much as that the person perceives
their situation to be “bad” (in error according to some reference
value for some perception they have of themselves. If that is so, a
resolution to the problem might be in a direction orthogonal to the
direction of the apparent conflict).
"Stiffness" is a property that we ascribe to some people, both in
their physical comportment and in their personality. We perceive a
person who appears easy and relaxed, while being effective in both
their interactions with the physical environment (e.g. sports, arts,
construction, etc.) and with other people (e.g. easy-going,
tolerant, down-to-earth, etc.) to be in some way “better” than
someone who is rigid, formal, rule-bound, intolerant of strangeness,
and so forth, in other words, “stiff”.
**Stiffness as negative tolerance**
I just used the word "tolerant" in a way that opposes it to "stiff".
The opposition is inherent in the requirement for neural firing
rates to be non-negative. I’m not going to recap the thread on that
topic of a few weeks ago. Suffice it to say that there must be two
separate comparator outputs, one for negative error and one for
positive error. These may be biased one way so that an error near
zero is treated as being zero, or the other way so that even a zero
error is treated as an error in the direction reported by that half
of the comparator. In the latter case, the error is simultaneously
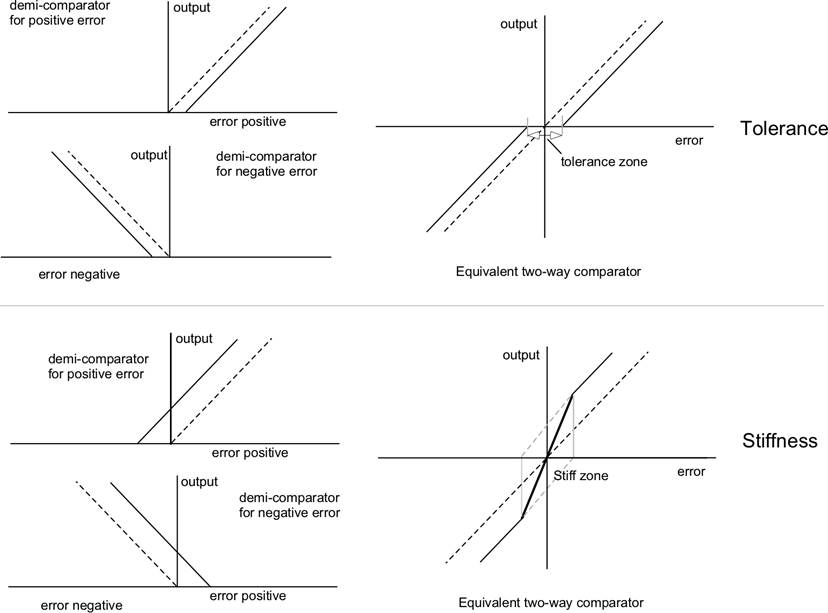
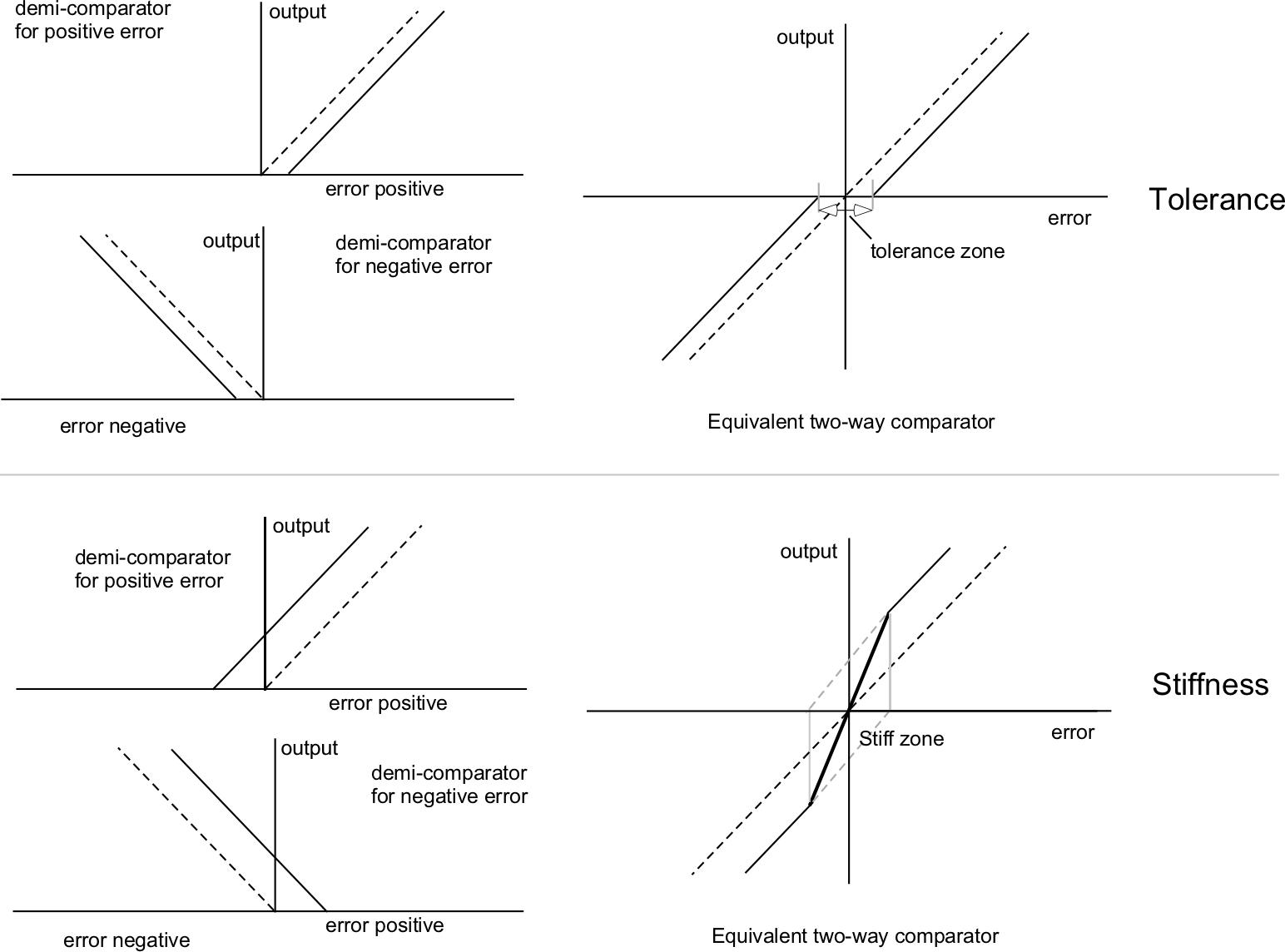
reported as being both positive and negative. The diagram suggests
these different possibilities.

The six panels of this Figure show possible comparator functions.
The four in the left column show the output versus actual error
(reference - perception) taking into account the fact that the
neural firing rate cannot be negative. Of these four, the lower of
each pair shows the output that would be inhibitory downstream at
the output function, equivalent to a negative output. The right-hand
pair shows the equivalent virtual two-way comparator, the lower half
being the lower left panel flipped vertically. In each panel the
dashed curve (line) shows an unbiased comparator, while the solid
line shows the output for a biased comparator.
In the upper set of three panels, the bias is such that the
equivalent two-way comparator has a tolerance zone, a region near
zero error that is treated as though the error was truly zero. In
the lower set, the bias is in the other direction, so that both
one-way comparators produce output even when the perception is equal
to the reference. The equivalent two-way comparator never does that,
but it has a zone in which the equivalent output changes twice as
fast as a function of the true error. The output being non-zero for
both “half-comparators” in a region around zero actual error creates
an opposition between the output in one direction and the output in
the other direction, which produces a zone of stiffness around zero
error. Stiffness and tolerance are two sides of the same coin, and a
system can be smoothly changed from a tolerant one to a stiff one by
a continuous change of bias.
The stiffness-tolerance bias is not part of Powers's simple
hierarchy, but it is something we employ, at least at the muscular
level. I see no reason why it could not be a controllable
perception. After all, we do say to people things like “Let it go.
It’s OK as it is, so stop trying to make it better.”, which asks the
person to widen a tolerance zone. The opposite is less obvious, and
is seen usually more in interpersonal interaction than in dealing
with physical systems, though it is not unheard of to control to get
something near its reference level and then to stiffen up,
increasing the gain to get the almost right to become “just right”.
As noted above, the virtual gain increase that goes along with the
conflict in creating stiffness may not be the main value to the
organism of making something stiff. The value is likely to be in
stabilizing something in another dimension that is used by some
quite different control system, without attempting to control in
that other dimension, thus avoiding conflict with the system that
uses the stabilized but not controlled dimension. Kent McClelland
has talked about collective control providing systems of stable
properties of the environment, such as roads than enable quicker
travel between towns than would be possible through untamed jungle,
or administrative roles in an organization that allow other people
to use people in those roles for their own purposes, as a sales
assistant may make it easier for a high-school graduate to control
her perception of just what dress to buy for the Prom.
I think that's enough about stiffness for now. In the first draft of
this message I followed this with a longer section about tensegrity,
but I will leave that for a later message.
Martin