[Eetu Pikkarainen 2017-06-13]
(This is comment to the end of Martin’s message.)
Yes I know that �stabilization� is problematic term and I hope that some English speaker would invent a proper alternative. The general meaning of “stabilization� (to
become stabile) is one (important) special case of the concept for which we need a term. The core meaning of this concept is something like “the process where a subject affects something in the environment in a such way that this something is changed and/or
kept in a such state that the subject gets a perception which is near to his/her reference value�. If this process is looked at from subject’s viewpoint it is “behavior� or “action� but now it should be looked from the viewpoint of the object (that something).
So it is “to be acted on�. I have two suggestions: “constrained� and “adjusted�. (If I remember right Martin once suggested “constrain�?)
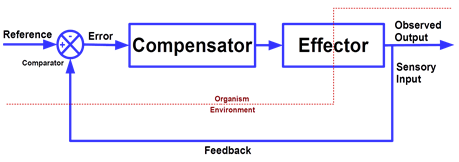
Why not “control�? Because in PCT the subjects action is based on (and explained by) the control of perception, where the perceptual signal is compared to reference
signal and if there is difference then that difference is tried to minimize by affecting the object of the perception. So “control� already has a strict and pivotal meaning and use. It is confusing to call one special constituent of that “control� also control.
Of course you could say like Rick that we control by controlling, but then we use the same term for two essentially different processes – essentiallyy different for understanding PCT as a theory. At least they should be clearly marked different for example
by some subscript like:
control(env) and control(per). Control(env) or “environmental control� is the concept used in everyday and (probably) engineering language
where the whole process is projected to the environment. In PCT that control(env) is the part of control(per) (control of perception), the part which takes place in the environment of the controlling subject and is perceivable to observer
and causes consequences for other subjects.
But anyway for me it sounds more clear to use clearly different terms: When we act we
control our perceptions by constraining the environmental objects of our perceptions by our behavior (and by a feedback path).
More technically and generally: “A controlling system (or unit) controls its perceptions by constraining its environment.�
···
Eetu
Lähettäjä: Martin Taylor [mailto:mmt-csg@mmtaylor.net]
Lähetetty: 12. kesäkuutata 2017 21:03
Vastaanottaja: csgnet@lists.illinois.edu
Aihe: Controling observables (was Re:… long live William T. Powers)
[Martin Taylor 2017.05.12.13.14]
[Eetu Pikkarainen 2017-06-12]
EP: The issue is ONLY that we do NOT control anything in the environment but only our own perceptions - even though the control is realized by affecting the environment.
RM: This is simply not true. See my recent post to Martin. I’ll just repeat my last point: If people controlled only their perceptions then there would be no way for anyone other than the person doing the controlling to know this.
The truth of that depends entirely on your definition of control. If the definition of control requires that there be an observer, the underlying philosophy is one that says definitively: “If a tree falls in the forest and no organism is around to hear it,
it DOES NOT make any sound.”, then what you say could possibly be true. Not otherwise. I do not subscribe to that philosophy, and that fact may contribute to a lot of our disagreements. I would say that it doesn’t matter whether anyone else can know whether
you are controlling something – even you may not know it, as according to PCT, most control is unconscious.
As I think of the way the world works, control happens (or does not happen) whether or not there is an external Experimenter/Analyst/Observer available in the neighbourhood to assess the environmental dynamics associated with it. From what Eetu quoted, I understand
you to be saying that “control” is nothing more than a perception in the brain of an observer who has developed a perceptual function, the output of which can be labelled “degree of control”. From your quote above and from your other writing, you think control
does not exist in the world outside the Observer.
EP: I think you partly replied on behalf of in your message [From Rick Marken (2017.06.11.1640)] but only partly. You wrote:
“a controlled perception is an inference based on observation of the fact that certain variables in what is perceived by an observer as the subject’s environment are controlled (maintained in reference states,
protected from disturbance).�
I agree with this quote. Whether the observer perceives control as occurring is different from the Analyst inferring how that control is executed (itself another perception). This is true in both philosophies. What either of them perceives is affected by what
is happening in their real environments, which is where the control they both do (or do not) perceive is (or is not) occurring.
This means that an observer sees something special happen in the environment and from that s/he
infers that the subject is controlling some perception. As part of that inference the observer can do tests and try to disturb the subject’s controlling. What the observer is seeing is not control, but stabilization, see below…
EP: Question is about the definition of control in PCT.
RM: The definition of control in PCT is completely in terms of observable variables.
In engineering it is, but in PCT? Not if one is actually serious about PCT as a theory. In PCT (as in much of science) the observables are only part of the way an Observer sees the world. A PCT observer sees the observables, but sees them only in terms of controlled
perceptions, not as the be-all and end-all of what is happening.
It is an “objective” definition in the sense that others besides the observer can confirm the observation. The definition of control in PCT is: maintenance of a variable in a reference state, protected from disturbance. “Perception” is
not part of this definition; perception is a component of the theory that accounts for this objectively observable phenomenon.
Yes, that’s why a non-PCT observer might use a definition couched in terms of observables only. A PCT observer would take the observables as a starting point confirmable by another observer, not the end point. As several of us have mentioned, not only recently
but over the years, no reference state can be observed in the environment. Reference states must be inferred from the ways the observables change. So “maintenance of a variable in a reference state” implies comparing apples to apples, not apples to oranges
or an observable state to a reference state that is necessarily inferred. However, an inferred state that we call a “Perception” can legitimately be compared with an inferred reference state, and therefore can be controlled. An observable environmental state
cannot.
EP: Perception may not be a part of the definition, but the reference is. Like perception, also the reference is only inside the subject / organism. It is not principally unobservable, but at the current and near future
state of neurology it is not possible to measure the reference value of the subject. So the definition of control (in PCT) cannot be defined completely in terms of observable variables.
Exactly so.
EP: When you see (the fact) that something is (in a certain way and conditions) stabilized in the environment of the subject, you can infer from that to (the fact of) control. It is like all science a hypothetical and
fallible inference, but by experience a more reliable inference than many everyday alternatives. That is just the glory of science: you can know something what you have not (immediately) perceived.
I have to quibble about the word “stabilize” and its relatives, because most of our controlled variables are far from stable. When I type this message, the reference values for my perceptions of the locations
of my fingertips move all over the keyboard, quite quickly. When I walk, reference values for various muscle tensions are always changing. And so it goes, all the way up the hierarchy, the changes getting slower the higher in the hierarchy one goes (all Perceptual
Control Theory, of course).
These rapid (theoretical) variations in reference value make it harder to “observe” control happening. Consider one of Rick’s “mind-reading” demos, in which a number of objects move randomly around the screen (three, but any number could). The subject is asked
to make one of them go where she chooses. If she chooses to make the track look as random as the tracks of the others, there’s no way another person looking at the screen could tell which one was being controlled. But the computer can, because it knows precisely
where the controlled one would go if only it made that decision, moment by moment. Nothing in such a demo would be “stabilized” except the relationship between the subject’s reference location as it changes and her perception of the location as that changes.
And that is not observable by anyone else.
Martin