Martin,
did you men something like this:
Eetu
[Martin Taylor 2017.08.16.09.35]
Yes. Thanks for drawing the picture.
Martin

On 2017/08/16 3:21 AM, Eetu Pikkarainen
wrote:
Martin,
did you men somethinglike this:
Eetu
–
Please, regard all mystatements as questions,
no matter how they areformulated.
-----Alkuperäinenviesti-----
Lähettäjä: Martin Taylor [] Lähetetty: 16. elokuutata 2017 8:13Vastaanottaja: Aihe: Re: Dealing with the limitation of only positive
neural signals
[Martin Taylor 2017.08.16.01.06]
> [From Fred Nickols (2017.08.15.1537ET)]
Martin:
> The attached .jpg diagramillustrates what I was talking about when I
> referred to having different (yetconnected) control systems for the
> right and left positions of the carin its lane. That was my way of
> getting around situations Rickraised where r might larger than p or p
> might be larger than r, suggestinga negative or positive error yet
> only positive neural signals areknown to exist. Does it fit with the way you see it?
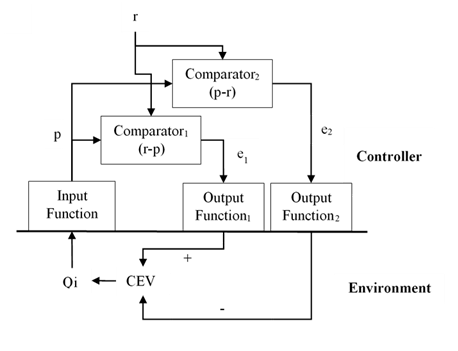
Not quite. I would have only oneperceiving function and one reference value signal. Those
signals would be sent to two comparators, one of which would
have zero output if the error were rightward and the other
would have zero output if the error were leftward. Otherwise,
I think the rest of it more or less coincides with my view.
The perceiver doesn’t have to have zero output for the car
being in the middle of its lane, so you don’t need separate
ones for left of centre and right of centre.
Martin
csgnet@lists.illinois.edu
[From Fred Nickols (2017.08.16.1207)]
I knew I was getting in over my head. That said, how does the arrangement below serve to keep the car in the center of the lane.
I especially don’t get how r-p and p-r fit in.
Walk me through it, please.
Fred Nickols
From: Martin Taylor [mailto:mmt-csg@mmtaylor.net]
Sent: Wednesday, August 16, 2017 9:37 AM
To: csgnet@lists.illinois.edu
Subject: Re: VS: Dealing with the limitation of only positive neural signals
[Martin Taylor 2017.08.16.09.35]
On 2017/08/16 3:21 AM, Eetu Pikkarainen wrote:
Martin,
did you men something like this:
Yes. Thanks for drawing the picture.
Martin
Eetu
–
Please, regard all my statements as questions,
no matter how they are formulated.
-----Alkuperäinen viesti-----
Lähettäjä: Martin Taylor [mailto:mmt-csg@mmtaylor.net]
Lähetetty: 16. elokuutata 2017 8:13
Vastaanottaja: csgnet@lists.illinois.edu
Aihe: Re: Dealing with the limitation of only positive neural signals
[Martin Taylor 2017.08.16.01.06]
[From Fred Nickols (2017.08.15.1537 ET)]
Martin:
The attached .jpg diagram illustrates what I was talking about when I
referred to having different (yet connected) control systems for the
right and left positions of the car in its lane. That was my way of
getting around situations Rick raised where r might larger than p or p
might be larger than r, suggesting a negative or positive error yet
only positive neural signals are known to exist. Does it fit with the way you see it?
Not quite. I would have only one perceiving function and one reference value signal. Those signals would be sent to two comparators, one of which would have zero output if the error were rightward and the other would have zero output if the error were leftward. Otherwise, I think the rest of it more or less coincides with my view. The perceiver doesn’t have to have zero output for the car being in the middle of its lane, so you don’t need separate ones for left of centre and right of centre.
Martin
[From Fred
Nickols (2017.08.16.1207)]
I knew I was
getting in over my head. That said, how does the
arrangement below serve to keep the car in the center of the
lane.
I especially
don’t get how r-p and p-r fit in.
Walk me
through it, please.
Fred Nickols
From: Martin Taylor
[mailto:mmt-csg@mmtaylor.net]
Sent: Wednesday, August 16, 2017 9:37 AM
To: csgnet@lists.illinois.edu
Subject: Re: VS: Dealing with the limitation of
only positive neural signals
[Martin Taylor 2017.08.16.09.35]
On 2017/08/16 3:21 AM, Eetu Pikkarainen
wrote:
Martin,
did you men something like this:
Yes. Thanks for drawing the picture.
Martin
Eetu
–
Please, regard all my statements asquestions,
no matter how they are formulated.
-----Alkuperäinenviesti-----
Lähettäjä: Martin Taylor [mailto:mmt-csg@mmtaylor.net ] Lähetetty: 16. elokuutata 2017 8:13 Vastaanottaja: csgnet@lists.illinois.edu Aihe: Re: Dealing with the limitation of only positiveneural signals
[Martin Taylor 2017.08.16.01.06]
> [From Fred Nickols(2017.08.15.1537 ET)]
Martin:
> The attached .jpg diagramillustrates what I was talking about when I
> referred to having different (yetconnected) control systems for the
> right and left positions of thecar in its lane. That was my way of
> getting around situations Rickraised where r might larger than p or p
> might be larger than r,suggesting a negative or positive error yet
> only positive neural signals areknown to exist. Does it fit with the way you see it?
Not quite. I would have only oneperceiving function and one reference value signal. Those
signals would be sent to two comparators, one of which would
have zero output if the error were rightward and the other
would have zero output if the error were leftward.
Otherwise, I think the rest of it more or less coincides
with my view. The perceiver doesn’t have to have zero output
for the car being in the middle of its lane, so you don’t
need separate ones for left of centre and right of centre.
Martin
image0016.emz (937 Bytes)
![]()
[Eetu Pikkarainen 2017-08-17 2]
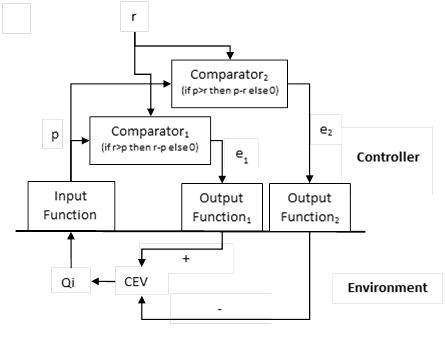
Thanks Rick! I added the more explicit equation to the comparators in a shortened form:
Fred, now I think I can solve the application problem.
Let’s arbitrarily choose that left is negative direction. (Right handed controller in a culture where we write from left to right.)
The left edge of the lane is 0% and right edge is 100%. The target (Rick’s “reference state�) in the center of the lane is 50% of the width of the lane.
Respectively the perception of car being in left verge is 0% of the perception of car being in the right verge and the reference value is 50% of the perception of car being in the right verge. (This is the most clumsy
part!)
If the car drifts to half of the left side of the lane then the perception is a half of reference value (and 25% of the perception of the car being in the right verge).
If the car is in the center then both comparators send zero error and you keep the steering wheel as it was. If the car drifts to left then the perception becomes lower than the reference and the comparator1 starts sending
an error value to the “positive� output function and you turn the wheel to the right. When the car then goes to the right side that error value of comparator1 goes to zero and the comparator2 starts sending an error value to the “negative� output function
and you turn the wheel to the left.
Hope this helps you as it feels(?) to help me.
Eetu
–
Please, regard all my statements as questions,
no matter how they are formulated.
[Eetu Pikkarainen 2017-08-17 3]
Fred, really, they are missing!
Yes they are forces that make the car drifting to one or another side. CEV being the position of the car then there should be the disturbance arrow to the CEV (from somewhere in the
environment). The environment side could be drawn more detailed for this application. The steering wheel is not CEV but part of the feedback path (Martin’s “atenfel�).
Eetu
–
Please, regard all my statements as questions,
no matter how they are formulated.
Lähettäjä: Fred Nickols [mailto:fred@nickols.us]
Lähetetty: 17. elokuutata 2017 15:07
Vastaanottaja: csgnet@lists.illinois.edu
Aihe: RE: Dealing with the limitation of only positive neural signals
[From Fred Nickols (2017.08.17.0805 ET)]
One question, Eetu. Where are “disturbances�? I don’t see them in the diagram.
Might you bring the arrow from Output Function2 into the right side of the CEV and bring Disturbances in to CEV from the bottom?
Fred
From: Eetu Pikkarainen [mailto:eetu.pikkarainen@oulu.fi]
Sent: Thursday, August 17, 2017 7:48 AM
To: csgnet@lists.illinois.edu
Subject: VS: Dealing with the limitation of only positive neural signals
[Eetu Pikkarainen 2017-08-17 2]
Thanks Rick! I added the more explicit equation to the comparators in a shortened form:
Fred, now I think I can solve the application problem.
Let’s arbitrarily choose that left is negative direction. (Right handed controller in a culture where we write from left to right.)
The left edge of the lane is 0% and right edge is 100%. The target (Rick’s “reference state�) in the center of the lane is 50% of the width of the lane.
Respectively the perception of car being in left verge is 0% of the perception of car being in the right verge and the reference value is 50% of the perception of car being in the right verge. (This is the most clumsy
part!)
If the car drifts to half of the left side of the lane then the perception is a half of reference value (and 25% of the perception of the car being in the right verge).
If the car is in the center then both comparators send zero error and you keep the steering wheel as it was. If the car drifts to left then the perception becomes lower than the reference and the comparator1 starts sending
an error value to the “positive� output function and you turn the wheel to the right. When the car then goes to the right side that error value of comparator1 goes to zero and the comparator2 starts sending an error value to the “negative� output function
and you turn the wheel to the left.
Hope this helps you as it feels(?) to help me.
Eetu
–
Please, regard all my statements as questions,
no matter how they are formulated.
[Eetu Pikkarainen 2017-08-21]
Boris,
This diagram is meant only to describe how a two-way control is possible in a most simple way.
I think it could be thought of as a combination of two control loops which have a common input function.
The two-way control means that the perception can have higher or lower values than the reference and so the output must have a opposite directions depending on the situation. In an environment
the output must for example be pushing or drawing. The one and same output function cannot produce these opposite forces but there must be two functions and they must have their own error signals. Similarly inside the body some value like heart rate may be
raised by one hormone and lowered by another. One gland cannot produce these both according to one error signal
I think I have seen BP (or someone?) write that this kind of two way control might require two separate control loops. But isn’t it waste to use two separate input functions to observe the same
variable and to produce the same perception (or rather two identical perceptions)?
Eetu
–
Please, regard all my statements as questions,
no matter how they are formulated.
Lähettäjä: Martin Taylor [mailto:mmt-csg@mmtaylor.net]
Lähetetty: 20. elokuutata 2017 6:21
Vastaanottaja: csgnet@lists.illinois.edu
Aihe: Re: Dealing with the limitation of only positive neural signals
[Martin Taylor 2017.08.19.23.15]
On 2017/08/19 6:16 PM, Boris Hartman wrote:
Dear Eetu,
diagram is nice, but I’m afraid that it would be better if you would use standard Bills’ diagram. My oppinion is that general Bills’ diagram is about »comparator« that represent »one neuron« or all »nervous system«.
So introducing new »comparator« into general picture and double »outputs« could mean that you introduce new »nervous system« and multiple and separated acting on environment. My oppinion is that »nervous system« does not operate in this way.
Boris, have you managed to find a way to discover neurons that output negative firing rates? Without them, how does the structure in your diagram work? All Eetu’s diagram does is implement Bill’s diagram using neurons that have only positive firing rates. There
are probably lots of other ways to do it, but Eetu’s diagram adds or subtracts nothing from or to Bill’s diagram, other than to suggest a way to make Bill’s structure work with physiologically feasible neurons. It’s not new.
Martin
I attached one of his diagrams where »branching of perceptual signal« is not divided on the same level to many comparators and many outputs. I think that this Bills’ diagram is more in accordance with physiological
facts and it more fits into general »picture« how nervous system function. And I think it’s better to use his explanation in his books without using any Ricks’ imagination constructs and his literature which is by my oppinion useless for PCT explanations.
I’d advise you using Bills’ literature and his explanations of PCT.
Boris
From: Eetu Pikkarainen [mailto:eetu.pikkarainen@oulu.fi]
Sent: Wednesday, August 16, 2017 9:21 AM
To: csgnet@lists.illinois.edu
Subject: VS: Dealing with the limitation of only positive neural signals
Martin,
did you men something like this:
Eetu
–
Please, regard all my statements as questions,
no matter how they are formulated.
-----Alkuperäinen viesti-----
Lähettäjä: Martin Taylor [mailto:mmt-csg@mmtaylor.net]
Lähetetty: 16. elokuutata 2017 8:13
Vastaanottaja: csgnet@lists.illinois.edu
Aihe: Re: Dealing with the limitation of only positive neural signals
[Martin Taylor 2017.08.16.01.06]
[From Fred Nickols (2017.08.15.1537 ET)]
Martin:
The attached .jpg diagram illustrates what I was talking about when I
referred to having different (yet connected) control systems for the
right and left positions of the car in its lane. That was my way of
getting around situations Rick raised where r might larger than p or p
might be larger than r, suggesting a negative or positive error yet
only positive neural signals are known to exist. Does it fit with the way you see it?
Not quite. I would have only one perceiving function and one reference value signal. Those signals would be sent to two comparators, one of which would have zero output if the error were rightward and the other would have zero output
if the error were leftward. Otherwise, I think the rest of it more or less coincides with my view. The perceiver doesn’t have to have zero output for the car being in the middle of its lane, so you don’t need separate ones for left of centre and right of centre.
Martin