[Martin Taylor 2016.10.16.17.31]
[From Rupert Young (2016.10.16 21.20)]
(Martin Taylor 2016.10.16.10.32]
Your diagram would seem to suggest that for every perception
there is a corresponding CEV in the environment; that would be
independent of the perceiving system. Do you think that that
is the case?
No, it would not be independent of the perceiving system, nor
would the perceiving system be independent of it. Let me try to
explain.
The whole control hierarchy exists only because it helps the
organism to survive in the environment in which it lives – and
its ancestors have lived. Perceptual functions are costly. If
they were not, we could have a perceptual function for every
conceivable combination of sensory variables. We don’t, and
reorganization to keep intrinsic variable in states compatible
with life modifies the perceptual side of the hierarchy just as
it modifies the output side, both on an evolutionary time scale
and during the life of the individual organism.
Sure.
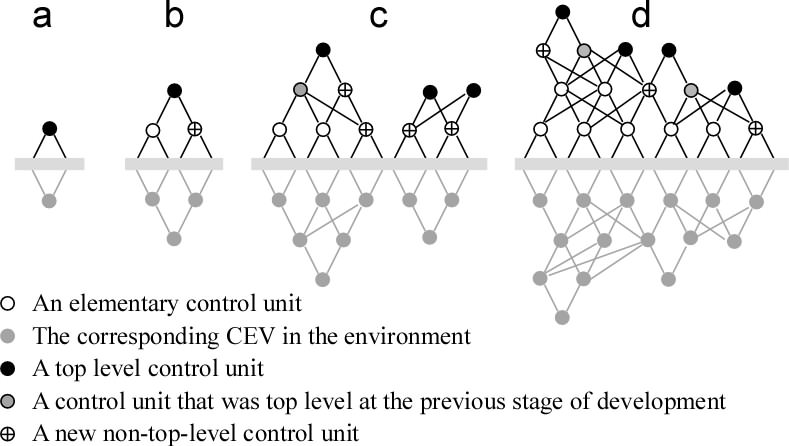
Perceptual functions such as "the temperature in
this room times the blueness of the sky plus the distance to
Bangalore" are unlikely to be useful, though if such a
perceptual function did exist (a dot above the line), it would
correspond to a function of environmental variables (a dot below
the line).
I don't see that the latter is necessary, as a perceptual function
is a function of environmental variables (or at least a function
of the environmental variables acting on the sensory system).
Or so you presume, since you have no independent evidence that there
are things in the environment that correspond to what the senses
report. Once you accept that there are, the rest of the argument
follows. The senses perform functions on whatever physico-chemical
effects impinge on them. Higher perceptual systems perform functions
on those.
I think you have to be consistent. Once you accept that the input
from the senses corresponds to some interaction event with the
environment, you have to accept that the results of the other
functions do, too. The result of applying one such function in the
environment is the dot below the line. It’s shaded in the figure
because it is selected by the perceptual function in the brain
rather than being an intrinsic structure in the Universe (are there
such things? How could we ever know?). The dot above the line is a
pattern of nerve firings, or in Powers’s simplification, a “neural
current”, the result of the perceptual function made of neural
network operations in the brain. The dot below the line is a pattern
of what we perceive to be in the environment.
So, in your example there are three environmental
variable, x, y and z. These are independent of the perceiving
system, and each other. There will be a perceptual function,
f(x,y,z). Why any need for what you are calling a CEV?
When you act, you can't act on the nerves to make them fire the way
you want. You have to act on x, y z in the environment, but to
influence the perception created by f( ), you have to influence not
independently x, y. and/or z, but that particular function of those
three variables. Any other effects produced by acting on x, y, and z
are what we call “side-effects” in PCT.
Calling it an "environmental" variable, and showing
dots below the line, i.e. out in the environment would suggest
they are properties of the environment, and independent.
Propertied of the environment, yes. Independent, no. If
“independent” is an impression you get from the figure, my attempt
to suggest a mirror image of the internal control hierarchy has been
rather unsuccessful. They are properties of the environment, if by
altering the value of that function you can alter the value of the
corresponding perceptual signal. If you can’t (as would be the case
for a mirage if you tried to drink from the “water”), the function
isn’t actually a property of the environment, though its arguments
may be.
It would seem to me to be more valid to have just
independent arrows below the line representing the raw
environmental variables rather than a hierarchy. And it is above
the line where those variables coalesce to form complex functions;
the perceptual functions.
Sometimes such a diagram might be useful, sometimes the other. No
diagram is the thing itself; as Korzybski said “The map is not the
territory”, and any territory can be mapped in a wide variety of
ways.
We have no knowledge of what exists in the
environment other than what we produce in our perceptual
functions. If we can act on the environment in a way that allows
us to control a perception that is produced by a perceptual
function, that perception must correspond to something in the
environment,
Although the raw elements that make up the perceptual function may
correspond to somethings in the environment, I don’t see that it
is necessary that the perception itself must have such
correspondence.
No. As I said, the correspondence applies only for perceptual
functions that persist. The process of reorganization produces all
sorts of results before finding ways to control perceptions well
that help keep the intrinsic variables in good condition. There are
lots of perceptions that don’t have that correspondence, but they
are unlikely to last very long if they are, to use the term, “a
waste of space” or worse, an active detriment to control that does
help with the intrinsic variables.
And how can something be in the environment but also not
independent of the perceiving system?
There is an infinite number of possible functions of N variables
possible functions, even if N is s finite as the number of sensory
cells in the organism. Until a finite number of them are selected
out by the creation of perceptual function processors, they are all
independent of the perceiving system. What is NOT independent of the
perceiving system is the selection of the ones that correspond to
things we perceive. That selection depends on the finite number of
perceptual functions created by evolution and reorganization in any
finite organism. It is not independent of the perceiving system,
because it is created by the perceiving system.
and if our control is good,we are likely to say that
there is a corresponding “thing” out there.
I'd say for most perceptions there is no "thing" out there.
Hunger, for example, is a perceptual feeling that we control, but
there is nothing called hunger out there.
"Hunger" is indeed a perception, but it does not depend on input
from sensors that only sense influences coming from outside the skin
of the organism. If you add internal sensors, then what influences
them comes from a different “out there” that includes some of the
interior of the “skin bag” of the organism, and that is defined by
the sensors themselves. Whatever physical and chemical influences
affect them comes from “out there”. The same applies to the sensors
of muscle tension and joint angle that produce the perceptions that
must be controlled when we muscularly manipulate things in the world
outside the “skin bag”.
The upshot of all this is that neither the dots
above the line nor the dots below the line have an independent
existence. Each is there because having the other allows for
control that keeps us and has kept our ancestors alive.
I'd agree, but only for the dots above the line. Perhaps you could
give some examples of what the dots below the line would be and
why they are necessary for control.
Let's say you are doing a pursuit track, moving a mouse to cause a
cursor on screen to follow the left-right motions of a target. One
dot above the line would represent a perception of the x difference
between cursor and target. The dot below the line would be the
actual distance between the luminous spots representing cursor and
target.
For us, the dots below the line is the entirety of
our personal Universe.
Do you mean above the line?
No. Dots "above the line" are our perceptions of the tiny bit of the
entire Universe that we do perceive (neural events and states). Dots
below the line represent the restricted portion of the Universe that
affects what we perceive by way of our sensory system (effectively,
the line).
I think you can't cherry-pick what you want to say is real and what
is not. If you accept that the senses report some transform, some
function, of physical or chemical influences from a real outer
world, you have no justification for saying other functions (which
ones) of those “reports” do not exist in that same real world.
Controlling the perceptual consequences of these layers of functions
requires you to influence those functions preferentially to other
functions of the same variables. If you can, then the function
results you can control have as much reality as do the events that
cause the millions of individual sensors to report what they do. We
can’t control those millions of inputs, anyway. We can only control
and perceive functions of them.
Martin