[from eetu pikkarainen 2016-10.28]
This is very interesting and confusing discussion (for a newcomer). PCT tastes really quite Kantian (constructivist) way of thinking. Kant was (or is regarded as) the first one to claim against the (Aristotelian) model of “in-formation” according to which
the external forms of the environment are copied (as scaled down) in our minds. Kant said that our (experiential) knowledge is a product or function of our own cognitive machinery (which consists of modes of perception and categories of reason). Thus we cannot
state anything about the features of the environment as such (Ding an sich) on the basis of our (experiential) knowledge about them.
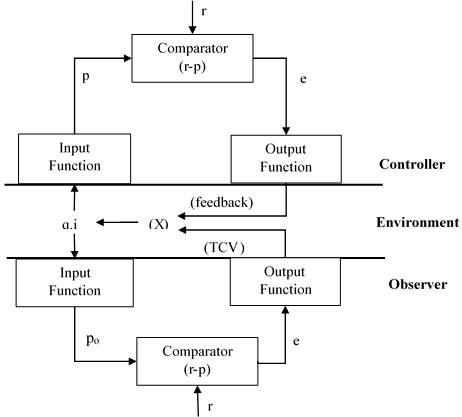
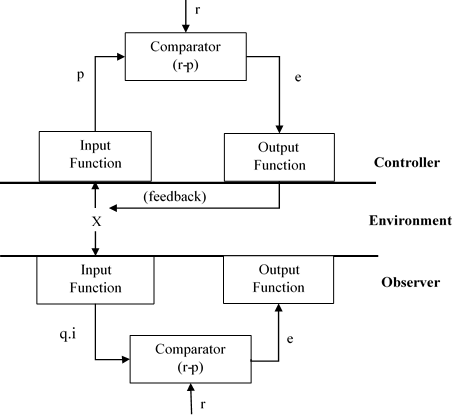
If I understood it right Rick said that q.i is the same variable as p, only difference that the previous is seen from the view point of controller and latter from that of observer? I tried to redraw the diagram so that the input function of the observer
were also explicit:

Here the observer is in the environment of the controller and v.v. In the section of the both environments there is something unknown X which is somehow causing the physical stimuli
for the receptors of both. But how can we still know that p is the same variable as q.i? Kant believed that the cognitive machinery is similar and functioning similarly in every normal mature human being but that’s not so sure. Secondly the relationships of
Controller and Observer with the X are probably different. Also I am still a bit confused with the idea that the variable could be same but its value could be very different. I guess that here is needed the Test (TCV) to know if these variables are same??
Now I would interpret Martin’s diagram so that the mirror (seems like shadow) side below the line is some kind of generalized structure of the controlling system(s)? So that red
and blue form purple as CEV because (!) they (generally) create a perception of purple in perceiving subject(s)? Perhaps I interpret wrong?
And I am sorry Martin that I did not react your very clear answer to my question which you sent oct 11th and which started that discussion. For some reason I did never
get it. I now unearthed it from the archive. Thank you!

···
Eetu Pikkarainen
Lähettäjä: Richard Marken rsmarken@gmail.com
Lähetetty: 28. lokakuuta 2016 4:53
Vastaanottaja: csgnet@lists.illinois.edu
Kopio: Richard Marken
Aihe: What’s the Matter with ECVs?
[From Rick Marken (2016.10.27.1850)]
Martin Taylor (2016.10.27. 16.13)–
RM: The problem with this model is that it implies that controlled variables exist as entities in the environment, as what you call CEVs. In PCT there is no such thing as a CEV…In PCT, the controlled quantity, q.i,
is the perceptual aspect of the environment that is controlled by the control system – the controlled variable – as perceived by the observer of the control system.
MT: Actually, p and qi are not the same variable, not the way the diagram is drawn.
RM: They are the same variable in the sense that they are the same function of environmental variables. The function that computes this variable for the controller – the function that computes p – is shown in
the control diagram as the Input Function; the function that computes this variable for the observer – the function that computes q.i – is not shown in the diagram; it’s implicit in the fact hat the observer is in the environment of the controller and, hence,
is perceiving what the controller is perceiving from outside of the controller, using their own perceptual function. So in the “What is size”?" demo, if the controller is controlling area then the controller is controlling p = hw – where hw is being computed
by the controller’s input function. At the same time the observer (in this case, the computer) is perceiving q.i = h*w. So q.i is the same variable as p, computed by different systems.
MT: In order for qi and p to represent the same variable, there must be some notional inverse functions, one for each of the various Perceptual Input Functions in the hierarchy, to invert its effect.
RM: I think what I described above shows why this is not necessary; p and q.i are the same variable because they are computed by different individuals (the control system and the observer of the control system)
using the same perceptual function.
MT: The mirror arrangement shows the mirror of the Perceptual Input Functions, not their inverses.
RM: I think the the mirror arrangement gives a somewhat misleading picture of the relationship between control systems and the environment in which they control. This can be illustrated using the “Control of Size?”
task. In this task you can control two different functions of the same environmental variables, height (h) and width (w). According to PCT, when you are controlling area you are controlling a perception, p.a, = h*w and when you are controlling perimeter
you are controlling p.p = 2(h+w). These two different perceptual variables are presumed to be the outputs of two different perceptual input functions. I think the mirror arrangement of this task would look like figure (b) in your diagram:
RM: The two systems immediately above the line are the systems perceiving (and controlling) area (open circle) and perimeter (circle with “+”). Both have two inputs, h and w, which are the two lines entering each
from the environment. The mirror image grey dots in the environment represent the “CEV” controlled by each system; the grey dots on the left and right being area and perimeter, respectively. So the mirror arrangement, based on your concept of CEV’s, implies
that there are two different variables in the environment that correspond to the two different perceptions that can be controlled, area and perimeter. But, in fact, there is really only one thing varying in the environment in the “What is Size?” demo, the
relative lengths of h and w. A better diagram of the situation would look like this:
RM: The single dot below the line represents the rectangular display in the “Control of Size” demo. There are still two inputs to the area (open circle) and perimeter (circle with a “+”) control systems but they
are the same inputs; h and w. The area control system perceives (and controls) p.a, the perimeter control system perceives (and controls) p.p, where both p.a and p.p are functions of the same variables, h and w. And since the perceptions p.a and p.p are functions
of the same environmental reality, they cannot be controlled at the same time. But the point of the revised “mirror” diagram is that there is really only one thing going on in the environment in the “What is Size?” demo: variations in the length of h and w.
What is being controlled in the “What is Size?” demo are two different aspects (or functions) of this environment.
RM: I suppose you could say that area and perimeter are two different CEVs corresponding to the perceptions, p.a and p.p, that can be controlled in the “What is Size?” demo. But this is just redefining a CEV as
a perceptual aspect of the environment – which is the same as the definition of a controlled variable – making the term unnecessary at best and confusing at worst.
MT: The environmental (qi or CEV) variable always changes before the corresponding perception does, perhaps by milliseconds, perhaps by days, weeks, or months (consider how long it takes to produce a profit statement
for a quarter). When you simply say “qi is p”, you lose that, which sometimes can be important, and can be the subject of experiment.
RM: I think what you are referring to is the time lag from sensory input to perceptual signal output. And, indeed, this has been the subject of experiment; I’ve shown (in my “Hierarchy of perception and control”
(http://www.mindreadings.com/ControlDemo/Hierarchy.html )
and more formally in experimental research (Marken, R. S., Khatib, Z. and Mansell, W. (2013) Motor Control as the Control of Perception,
Perceptual and Motor Skills, 117, 236-247) that some perceptions take longer to construct than others. In terms of control this is just part of the transport lag introduced by the nervous system.
RM: This PCT way of looking at things recognizes the fact that neither the control system nor the observer of the control system has direct access to what is in the environment; both are dealing only with a world of perception.
MT: Yes.
MT: And I love the way you have of saying “the PCT way of looking at things”, “According to PCT”, and similar things whenever we disagree on what PCT actually means. I’ve got used to it over the years, but it’s still a fascinating
way of referring to a complex abstraction, as if you have some privileged access to its complexities.
RM: The concept of a CEV is not part of PCT. But if you think it is, or that it should be, then all you have to do is show why it is or should be. And you show it by demonstrating what phenomenon it accounts for that is not accounted for by the existing
theoretical structure of PCT. I think the concept of a CEV is not only not part of PCT and unnecessary, I think it also throws a red herring across the path of research on PCT.
RM: This means that the observer must use the same (or equivalent) input (perceptual) function as the control system to construct a perception of the aspect of the environment that the control system is perceiving and controlling.
MT: Yes. But there’s a sticking point. No observer can ever guarantee to have the same perceptual function as the one the controller is using, and it is almost guaranteed that the observer’s sensory inputs differ from those of
the controller being observed. All we can do is approximate.
RM: So does that mean that we stop doing research on living control systems? The fact that our models can account for 99% or the variance and come within 2% of the observed behavior suggests that, even if we can’t be sure that we perceive exactly what
the controller is perceiving, we can come pretty darn close.
RM: The observer’s perceptual function might be part of the observer him or herself, as it is in the “Coin Game” where the observer uses his or her own perceptual functions to see what perceptual aspect of the coins is under control. But the observer’s
perceptual function can also be based on instrumentation, such as the computer calculation used to provide a perception of the area and perimeter of the rectangular shape in my “What is size” demo (http://www.mindreadings.com/ControlDemo/Size.html).
MT: Even then, the observer’s perception is in the observer. But suppose it were not. The same problem exists. Does the controller perceive the variables the computer uses in the same way the computer does? For that particular
demo, it doesn’t matter because the alternatives are clearly distinct and differences in the way the controller perceives them would not make the choices less distinct (at least not enough to create any difficulty).
RM: There it is; more invented reasons for not doing research testing PCT. I think research on PCT is the most important thing to do now. The theorizing has already been done by Bill Powers – and done rather well. If you are really hot to change or
extend the theory I suggest that you do (or suggest) some research, the results of which that would require such a change or extension.
Best regards
Rick
–
Richard S. Marken
“The childhood of the human race is far from over. We have a long way to go before most people will understand that what they do for others is just as important to their well-being as what they do for themselves.” – William T. Powers