Martin Taylor 2017.02.11.14.10]
It's interesting that Bruce is also on your "naughty list" of people
whose messages you must find ways to refute by any means you can
invent. Or maybe he’s only there temporarily because I said I agreed
with him.
I see that this time, you have invented an interesting "new PCT",
which seems to have some kinship with quantum mechanics, entangling
controllers and observers. It’s a concept that might be fun to
pursue as an intellectual exercise. I’ve tried to understand it, but
without success. A tutorial on it, along with a primer on the new
math that seems to be an intrinsic part of it, would be nice.
[From Rick Marken (2017.02.10.1845)]
Yes, we know that you have sensors that can directly perceive
instances of control, so you don’t need to say “appear to be
controlling”, as most of us do. I can describe to a red-green-blind
person what is necessary for the perception of red as distinct from
green, namely sensors that are differentially sensitive to the
balance between redness and greenness. Can you describe for this
“control-blind” person exactly what sensors are necessary for the
direct perception of “control”?
I have been led to believe that control requires three things, the
existence of a variable to be controlled, a reference value , and a
means of reducing the difference between the variable and its
reference value. Since later in the message to which I am replying
(and in many recent messages) you deny the existence of an
environmental variable corresponding to a perception, and since I
personally am unable to detect the existence of a reference quantity
in the environment or a means in the environment of comparing such a
reference to the variable in order to reduce it, apparently none of
them are necessary for your personal direct perception of control.
So what do you think are the inputs to your “control” perceptual
function?
No, it isn't a question for "normal" PCT. It's a question for
philosophers. In normal PCT it’s just a conventional part of the
control loop, “the aspects of the environment that correspond to
those perceptions.” In PCT, we just assume that there is something
“out there” that is influenced by the controller’s action and that
in turn influences the controller’s perception. No questions about
that are permitted. You say later that this is true also in “new
PCT”, but other parts of your description of new PCT lead one to
wonder.
OK. This statement obviously suggests a question about "new PCT",
since it seems to be a significant change from “old PCT”.
Question: Since Qi is only a perception in an external observer,
does this imply, as it seems to do, that control of the perception
cannot occur wile the observer has turned away, or worse, nobody is
observing?
In "old PCT" it is the actual speed. That's what determines whether
the car will negotiate a curve or skid into the guard rail, and the
effects if it crashes, for example.
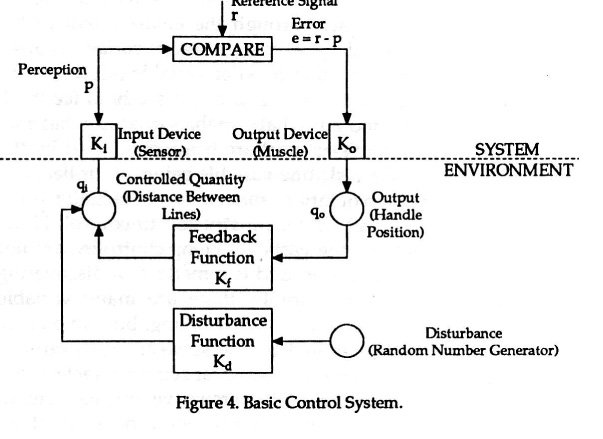
For a very old example of the use of "qi" see this diagram from
Marken (1981, p73 in “Mind Readings”). In LCS III (2008), Powers in
a similar diagram doesn’t give it a symbol, but just calls it “input
quantity”, for which the initials bear a surprising resemblance to q
and i. … Oh, surprise, that’s where the symbols “q.i” as opposed
to “q.o” comes from initially.

As the 1981 diagram shows, in which qi is the actual value of the
environmental variable before transformation by the “Input device”
(except that qi in the diagram represents “distance” not “speed”).
I think if you were to ask Bruce what he meant, he would say it was
the actual speed, not any other observer’s (or engineer’s)
perception, because he was thinking of old PCT. The actual speed is,
after all, the input to the sensor that provides input to (or is)
the cruise-control’s perceptual system (Ki in the diagram is even
called “sensor”).
Question: why do you start that sentence with "no", when the rest of
the sentence means “Yes”? So far as I can see, it is a paraphrase of
what Bruce said.
Oh. I think I understand, in "new PCT" the actual speed does not
exist unless someone is observing it. Is that what you meant? Or are
you referring to the fact that the actual speed is not measured in
neural impulses per second? Or what???
Question: Don't you mean "According to new PCT"? According to old
PCT, Qi is the environmental variable value that is the source of
the various inputs to the Perceptual Input Function that produces
“p”, the perceptual variable that the control system controls. (See
Marken diagram above).
And if there is no observer? What does Qi correspond to in that
case, in new PCT?
This is a very strange comment, whether we are talking about old PCT
or new PCT, unless new PCT is even weirder than I thought. Because
the cruise control sensor scale is wrong, controlling the perception
no longer influences the actual speed (in old PCT) or the observer’s
perception of the actual speed (in new PCT)? If it does not, how is
the feedback loop completed? I realize that the questions have no
answers that make logical sense, but it’s the best i can come up
with as implications of your comment. Maybe you can rephrase the
questions so that a logical answer exists in new PCT, if not in old
PCT.
... Oh, again I think I understand. It's the same as before, the
feedback loop necessarily goes through an observer, not the physical
environment. So when there’s no observer, nothing is controlled. But
in this case you do refer to an engineer-observer, so control is
going on, but the environmental variable “speed” is not being
influenced. Only the experimenter-observer’s perception of it is
being influenced, using some unstated mechanism. Is that right?
I'm glad that at last somebody knows the answer to a puzzle
philosophers have been concerned with for millennia – exactly what
is and what is not in the environment. Are you going to let them
know?
And you will soon provide us the axioms of the new math you have
been touting this last little while, in which the X is not a
variable if it is a function of variables Y and Z, won’t you?
Yes to the second sentence in both forms of PCT. For the third
sentence, Yes, in new PCT, No in old PCT.
I guess this is a previously unstated aspect of new PCT, that one
perceives one’s reference values for the Qi that is at the output of
the perceptual function rather than the results of the perceptual
function working on the inputs that come eventually from the
environment. Have I got that rights? New PCT seems to be very
complicated 
And new PCT involves also the new maths that you introduced a while
ago, in which if x is a function of variables y and z, x is not a
variable. I guess you have an entire new branch of science, not just
a new version of PCT. But you really should specify the axioms of
your new math before you use it in your analyses for public viewing.
So, another question: In the new PCT are the rather
far-from-perception abstractions of the models of physics and
chemistry more real than the perceptions on which they are based?
That environment in the old PCT includes the variable whose value is
qi (or Qi or q.i). What does it include in new PCT? I realize you
know, but at least for me you haven’t made it clear other than that
it does not include Qi.
I find two rather puzzling claims in that one partial sentence: "A
function of physical variables is a perception" and “a function can
only exist in a system that can compute that function”. Do you have
some way of justifying either of those two independent claims?
I think we need a proper tutorial in the new math than underlies the
new PCT, or rather a primer in the new math and a tutorial in the
new PCT, before we can properly understand them.
Martin
···
Bruce Abbott (2017.02.10.1515
EST)
Â
BA: The simple answer is that
control systems control perceptions.
RM: And by doing so they are controlling the aspects of
the environment that correspond to those perceptions.
Â
BA: But then there is the
question as to whether those perceptions correspond
to anything “out there� in the environment, an
entity that Bill Powers labeled Qi, for “input
quantity.�
RM: That’s not a question in PCT. …
...The observed behavior of the input quantity, Qi --
the fact that it is controlled – is explained by positing
that a control system exists that perceives the same
aspect of the environment that the observer perceives as
Qi.Â
RM: And Qi is not an "entity" in the environment; it is
an aspect of the physical environment that is a
perception in the observer of the control system.Â
Â
BA: If we were talking about a
mechanical device such as a car’s cruise control,
the clear answer is “yes.� Cruise control has a
sensor whose electrical output is proportional to
the speed of the car; Â That is, the sensor is a
transducer, “converting� the car’s speed (in, say,
kilometers per hour) to a voltage whose level is
proportional to that speed. That voltage represents
the car’s perceived speed as represented within the
speed control system. Perceived speed is p; actual
speed is Qi.
RM: The speed sensor is more than a transducer; it is a
perceptual function that perceives an aspect of the
environment that corresponds to the change in position of
some physical variable per unit time. There is an
environmental basis of this perception consisting of the
physical variables that are changing over time; but the
perception itself is a function of these variables… What
you call the actual speed is not the same
as Qi in PCT.
In PCT Qi corresponds to whatever the system itself
perceives as speed.
What you call the actual speed is the observer's (in
this case probably an engineer’s) perception of the speed,
probably derived from instruments (which are also
perceptions, of course). It’s the speed (perception) that
the observer-engineer wants the cruise controller to
control. The speed perception that the cruise controller
is actually controlling, as perceived by the
observer-engineer, is Qi.
BA: Â However, to affect that voltage (p), the system
must act on physical variables outside the system so
as to change the car’s actual speed (Qi).Â
RM: No, it must act on the physical variables outside
the system so as to change the car’s speed * as perceived
by the system itself.
*
According to PCT, Qi is the observer's perception that
corresponds to the perceptual variable that the control
system controls.
…
Â
BA: If the system is working
properly, changing the car’s speed will produce a
change in voltage at the speed sensor’s output, thus
moving the system’s perception toward its reference
level. Because of the proportional relationship
between Qi and p, controlling p will also control
Qi.
RM: Â That's true if Qi corresponds to the observer's
perception of the variable controlled by the cruise
control system.
But Qi is not controlled if Qi refers to the
observer’s perception of what they consider the “actual”
variable that the system is (or should be) controlling, as
you note in the next paragraph:Â
BA: A defect in the speed sensor could create a
situation in which, say, an actual speed of 100 kph
produces a voltage indicating that the car is going
90 kph.
RM: Right, the variable the control system controls is
the variable that corresponds to the aspect of the
environment it perceives. This cruise control system is
controlling an aspect of the environment that is not the
same as the one the observer considers to be “actual” –
the one that the system should be controlling (from the
observer-engineer’s point of view).
BA: In the example just
presented, the speed perception corresponds to a
single variable in the environment of the control
system – the car’s actual speed. <
RM: The speed perception corresponds to an aspect
(function) of physical variables in the environment. There
is no single variable in the environment that
corresponds to the speed perception being controlled. What
is in the environment are the physical variables that are
the basis for the computation of the measure (perception)
of speed.
BA: What about more complex cases
in which the perceptual signal depends on some
combination of environmental variables? The taste
of lemonade has been given as an example, and it has
been said there is nothing in the environment that
could be called the taste of lemonade. As has been
pointed out, however, surely there must be some
combination of variables in the environment that
yields what most would agree is the taste of
lemonade.Â
RM:I refer you to p. 113-114 of B:CP (original
edition). The section on Sensations and Reality. Here’s
the main point:
"The taste of fresh
lemonade, for example, contains an easily recognized
vector derived from intensity signals generated by sugar
and acid (together with some oil smells). However unitary
and real this vector seems, * there is no physical
entity corresponding to it* . The juxtaposition of
sugars, acids and oils in one common volume does not
create ad special entity there, and there are no
significant chemical reactions in the glass of lemonade.
That is, the mere intermingling of these components has no
special physical effects on anything else, * except the
person tasting the mixture* . The only significant
consequence of ingesting these components together is to
provide something for the lemonade-taste recognizer to
recognize". (WTP)
RM: The physical variables in the environment are the
sugars, acids and oils. A person’s perception, p, of the
taste of lemonade is created by a perceptual function –
the lemonade-recognizer. The variable Qi is the output of
the observer’s lemonade-recognizer function when it
corresponds to that of the drinking the lemonade.
Â
BA: Otherwise there would be no
reason to expect agreement across individuals as to
what lemonade tastes like.Â
RM: We expect agreement to the extent that different
individuals have the same lemonade-recognizer perceptual
function and they want the output of that function – the
perceptual variable that corresponds to the taste of
lemonade – Â to be at the same reference value (not too
sweet and not too sour, for example).
Â
BA: So there is some combination
of sensations, arising through the sensory receptors
involved, that will produce what most folks would
agree is the taste of lemonade. Given that the
perception (p) depends on inputs from a variety of
sensory receptors (multiple Qis), stimulating those
receptors in some particular pattern (or range of
patterns) of intensities, one could say that a
substance giving rise to the perception of a
lemonade taste exists in the environment, even if
the perception of that taste exists only in the mind
of the individual. There might even be several
combinations that would produce this experience.
RM: This is all correct except that Qi refers to the
output of the function of the effect of physical
variables – the sugars, acids and oils – that produces
the taste of lemonade; the physical variables themselves
are usually not included in the PCT model diagrams. But
they are included in the diagram in Bill’s 1973 Science
paper that is reprinted in LCS I (see p. 66) where they
are are called v’s. The input quantity (Qi) is a circle
surrounding the v’s, showing that Qi is a function of
these physical variables.
BA: I have ignored the fact that
none of us have direct knowledge of reality.Â
RM: Right, in PCT "reality" (the variables one the
environment side of the PCT model) consists of the
variables and process that are part of the models of
physics and chemistry.Â
Â
BA: Â What evidence we have
strongly suggests that a reality exists beyond our
perceptions, so I am disinclined to agree with the
mantra that “it’s all perception!�. In my view,
control of perception only works because by
controlling perception, we also (usually) bring
about states of reality that are in the main
conducive to our own survival and well-being.
RM: The mantra "It's all perception" just refers to the
fact that all we know is our own perceptions. But PCT
definitely assumes that reality exists. Look at any
diagram of a PCT model. There is always an environment on
the other side of the system. That environment is the
assumed reality.
RM: When I say that Qi does not exist as an entity in
the environment I am certainly not denying that reality
exists. PCT assumes there is a reality “out there” and so
do I. What doesn’t exist in that reality are thefunctions of the variables in that reality. A
function of physical variables is a perception that can
only exist in a system that can compute that function;
it can't be a property of the physical variables
themselves. Therefore, a function of physical variables,
like the taste of lemonade, does not exist as a physical
entity itself; it exists only as a perception in a system
that can compute that function.Â