[From Rick Marken (2017.02.14.0845)]
···
[John Kirkland 20170214 0840 NZT]
JK: What, exactly, is a fact (I keep reading about the “fact” of X).Â
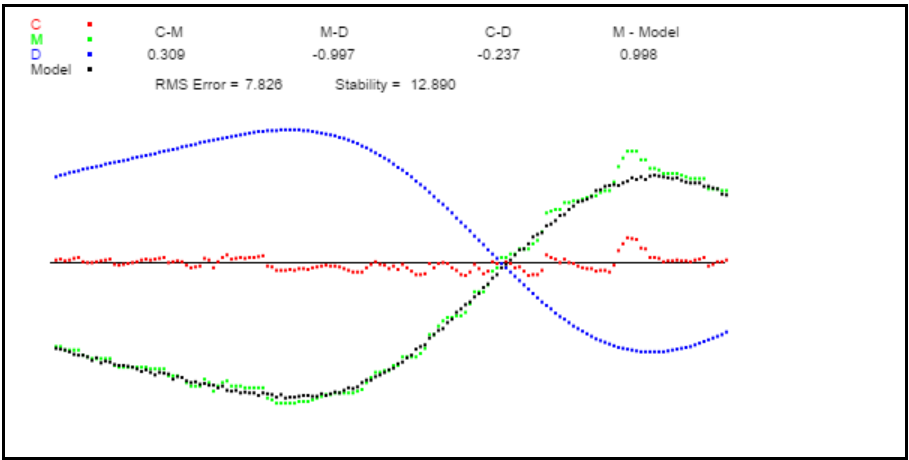
RM: I take a fact to be an observation (a perception). Since we can perceive the world in terms of different levels of complexity (intensities, sensations…principles, system concepts), facts can be of different levels of complexity. When I talk about the “fact of control”, for example, I am talking about observations like those that can be made in my “Nature of Control” demo (http://www.mindreadings.com/ControlDemo/BasicTrack.html), the results of which are shown in the Figure below. The facts of control are the observed relationships between the disturbance (D), output (M) and controlled variable (C) and the fact that C remains in a reference state (the target position indicated by the horizontal line), protected from the effects of D. By the way, the plot of C is a plot of the state of the controlled quantity (Qi).Â
JK: Secondly, is it possible for a person to observe their own control system operating?
RM: I think you can be aware of the fact that you are controlling, but I don’t think it’s possible to observe the operation of this control process; at least not while it’s happening. But you can get a glimpse of what’s going on by looking at your own control data, like that in the Figure above.
Â
JK: If so, then I’m unsure whom an “observer” is when mentioned in CSGNET commentaries.Â
RM: I’ve used the term “observer” to refer to a person, such as an experimenter, observing the controlling being done by another living system.Â
Â
JK: Which leads me to mentioning “reference levels”. When another person, or written instruction, or code of ethics, directs me to do something, when a standard or rule is held up for emulating (like accepting a circuit diagram, repairing an engine, doing unto others, obeying the law etc.), then how can I embrace these as goals/targets/aims without it becoming a massive disturbance rocking my cognitive balance?
RM: In many cases you can’t. This is the problem with arbitrary control of behavior; it produces interpersonal conflict between the controller and controllee and internal conflict in the controllee as well.Â
Â
JK: Finally, I am at a loss to understand why there is so much resistance to PCT evolving; citations are continually being made to certain extant literature as if this was written on tablets.
RM: I am very much in favor of PCT evolving. I just want it to evolve (change) based on scientific test rather than theological argument.Â
JK: Why am I even bothering with seeking assistance to help me address these niggles?
RM: Because you are a control system and those “niggles” are errors in control systems that are controlling some rather high level perceptions
Â
JK: They are mildly irritating. And, of course, when these are eased then what tends to happen? More niggles, destabilisation and unease. Hey, it’s my flag of life.Â
RM: If that happens then you may be reorganizing.Â
Â
JK: Staggering onward.
RM: That’s all we all can do.Â
BestÂ
Rick
Â
JohnK.Â
–
On Tue, Feb 14, 2017 at 7:10 AM, Fred Nickols fred@nickols.us wrote:
[From Fred Nickols (2017.02.13.1307 ET)]
Â
I am not trying to mix in this conversation but I do have a question about something Rick wrote.
Â
Â
From: Richard Marken [mailto:rsmarken@gmail.com]
Sent: Monday, February 13, 2017 12:05 PM
To: csgnet@lists.illinois.edu
Subject: Re: What does a control system control?
Â
[From Rick Marken (2017.02.13.0900)]
Â
RM: The inputs to perceptual functions are the sensory effects of environmental variables. My perceptual functions turn these sensory effects into perceptual variables such as intensities, sensations, configurations… principles and system concepts.
Â
FN: I get the preceding statement. My question ties to it and the next one.
Â
RM: And Qi is not an “entity” in the environment; it is an aspect of the physical environment that is a perception in the observer of the control system.Â
Â
FN: What are the differences between an environmental variable, an “entity� in the environment and an aspect of the physical environment?
Â
Fred Nickols
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery