[Martin Taylor 2017.02.13.17.57]
[Vyv Huddy 1955.12.02.2017]
This is great set of posts on this thread and the previous
one. Particularly helpful to see the posts by rick and bruce
describing the figure in the Powers Science paper showing
multiple V. I noticed that and missed why it was important.
It isn't important. It's just a consequence of the fact that if you
have a perception p1, it’s evolutionarily pointless to have a
perceptual function that just takes only p1 as input and creates p2
as a function of p1. Why pointless? because if you control p1 you
would also be controlling p2, and vice-versa. Every perception you
have depends on several variables, without exception, unless you
count as perceptions the myriads of individual sensors (retinal rods
and cones, auditory hair cells, and so forth). Even they are
influenced by what their neighbours are and have been doing. So when
you talk about a perception, you are always talking about “multiple
V” in the environment. I learned about levels of perception that
were built one on the other from a Children’s Encyclopedia when I
was about 10, so for me this idea that every perception is built
from a lot of others is just a given.
The important point is about degrees of freedom. In the Powers
version of Perceptual Control Theory, each perception has only one
degree of freedom, its value. That creates a bottleneck in the loop,
which means that no matter how many variables there are at different
parts of the loop, there’s only one degree of freedom anywhere in
the loop that is related to the perception. That degree of freedom
may be distributed over many “wires”, but no matter how many wires,
there’s only one degree of freedom. Specifically, for the purpose of
this discussion, the CEV has only one degree of freedom. That’s the
important point to keep in focus.
If you are unfamiliar with the "degrees of freedom" concept, the
basic idea is very simple, though the nooks and crannies of it an
get rather arcane. Basically, a construct has as many degree of
freedom as it has variables that can be independently changed. A
point on a plane can be moved in x and y, but once you have
specified them, you can’t move the point without changing one or
other of them. If you now try to describe the location as radius and
angle theta (polar coordinates), you find you can’t vary either of
them without changing one or both of x and y. You could describe the
location of the point as x and radius, (which would be ambiguous)
but when you specified those, then you would have fixed theta and y
(apart from sign). A triangle has three degrees of freedom if you
ignore its location. You can specify the lengths of its three sides,
but then you can’t independently specify any of its angle. Or you
can specify two sides and an angle, or one side and two angles.
Three angles won’t do in this case, because two of them determine
the value of the third, and if you try to specify only angles, you
have only two degrees of freedom to work with. You need three, and
the third could be, say, the distance from the triangle centroid to
the nearest side.
In the case of the CEV and the perception, you can specify one of
them, but then you can’t independently specify the other without
changing something else. They have one degree of freedom between
them, but you can locate that degree of freedom anywhere around the
loop, such as in the values of the component variables that
contribute to the value of the CEV.
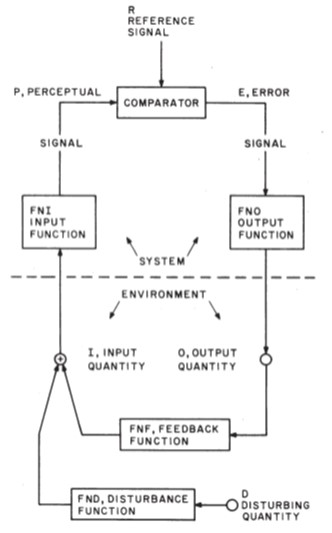
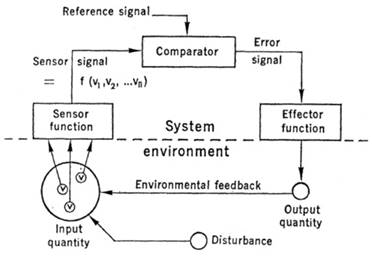
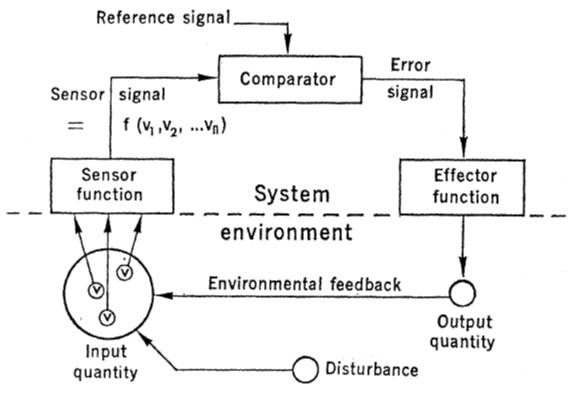
You talk about the diagrams of the loop in which the CEV is shown as
a circle containing components, and multiple lines lead from the
action output to the components in the CEV circle. Those diagrams
are all valid, if sometimes a little misleading, but equally valid
is the type of diagram in which there’s just one line from output to
a little circle where the output meets the disturbance to create the
sensor input. The “one-line” diagram correctly shows the single
degree of freedom around the loop, but fails to show any of the
complexity of the processes. It’s your choice which kind of diagram
you prefer, to illustrate a particular point you want to make.
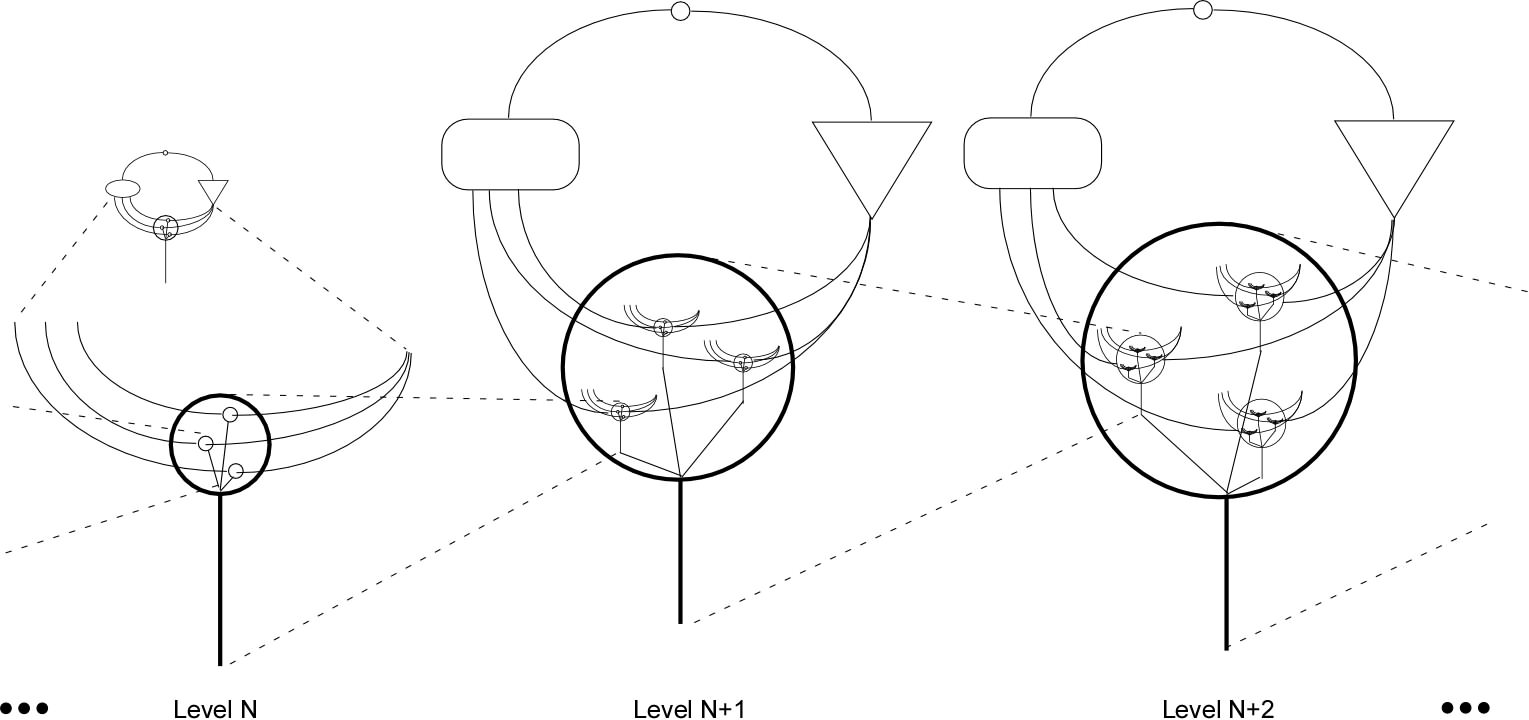
The HPCT diagram usually shows layers of control units inside the
organism with lots of cross links from systems at one level to
systems at the other. But you can do the same sort of hierarchic
visualisation with the “dots in a circle CEV” view.

In this diagram, the little inset at the top left shows one complete
control loop with an incoming disturbance signal. The rest shows
only the environmental parts of the loops at different levels of the
hierarchy. At the left we have the “dots in a circle” view at a
level I call “Level N”. The heavy circle and incoming line from
below show respectively the single degree of freedom CEV and
disturbance.
Inside the circle are shown component variables of the CEV, each
being affected by separate branches of the output and of the
disturbance. If you ignore the value of the CEV, these three have
one degree of freedom each, making three in all. But if you vary one
of them, you have to also vary one or both of the others if you are
not going to change the value of the CEV. Among the four values (CEV
and its three components) there is only one degree of freedom,
because the CEV is a function of its components.
In the middle part, the diagram shows the same thing one level
higher in the hierarchy, except that in this case the individual
internal components (the level N CEVs) each are explicitly shown to
be of the type illustrated at the left. Again, each component at
that level has its individual “wire” from the output and from the
disturbance, so that if level N had been the base level, the action
output would now be influencing 9 independent
components, and there would be nine affected sensory inputs. At the
next level there would be 27, and so forth, assuming always three
component CEVs for each next-level CEV. Likewise going to lower
levels, several perceptions at level N-1 become the components at
level N. But each CEV, considered by itself, has exactly one degree
of freedom, no matter how many components and subcomponents it may
have.
(Since not all perceptions are controlled, the components could
simply be the environmental variables corresponding to uncontrolled
perceptions, in which case one would omit its “action wires” in the
diagram.)
We ask about the "reality" of the CEV represented by the heavy
circle. Since at every level, the heavy circle represents a function
of the little circles, the “reality” question has to be given the
same answer at every level. Furthermore, since even at the lowest
perceptual level, there are always multiple sensors (e.g. retinal
rods, auditory hair cells, touch receptors. etc) involved, the same
“reality” question applies before you even get to the lowest level
of perceptual control. I think logically, one has to say either that
there are NO environmental variables corresponding to ANY perceptual
signal, or that ALL the CEVs corresponding to ALL the perceptions
that are based purely on sensory inputs are equally real. And each
CEV has exactly one degree of freedom if the corresponding
perception does, no matter how many components it can be proved to
depend on.
If all the CEVs at a level are equally real -- either all real or
all unreal – what should we say about “virtual reality” and about
the apparently real scenes in movies? Firstly, you cannot control
anything you see in a movie. All the components in the diagram are
devoid of “action wires”. If that had been true all your life, you
probably would never have reorganized to produce perceptual
functions that produced those perceptions. But it hasn’t been true
for you or for your ancestors. You have most of those perceptions
because they or something like them have been usefully controlled
for long enough to establish the corresponding perceptual functions.
The movie uses the perceptual functions you have developed through
active control. Their usefulness in selecting their specific
functions out of the environment in which you have lived has helped
you or your ancestors to “live long and prosper”. As one might say,
imagination may caress, but reality bites.
Now there's always the question as to whether the CEV is actually in
the environment. It’s not a question one can ever answer assuredly
affirmatively. As with a scientific hypothesis, it can be disproven,
but not proven. So what about “Virtual Reality”? In VR you can
control quite a few perceptions, and the more perceptions you can
control, the more real (on average) the experience. But you know
consciously that you are not in a world in which virtual shopping
gets real food that will allow you to control your perception of
satiety-hunger. I would be surprised if that difference were not
also part of the perceptions that you control in VR – at least at
high enough levels.
So far in this thread, we have been assuming that the perceptual
input comes only by way of the sensory apparatus, which means the
CEV is indeed in the environment. But it’s quite possible for some
of the input to a perceptual function to come from imagination. In
that case, the environmental portion of the input is no longer
constrained to be a single degree of freedom, because changes in one
or more of the environmental variables can be compensated by changes
in the part that comes from imagination.
No Test for the Controlled Variable could find a CEV that is partly
imagination. The CEV corresponding to the perception is only partly
in the environment, and the best a TCV could do if the imagination
part changes is to find control to be poor at best. Perception might
be controlled very well, but the corresponding perception in the
external environment might not be. So we have to ask for each
perception the degree to which its value is influenced by
imagination. This is a tough problem both for an outside observer
and for an observer in the same body as the perception under
examination. So we look elsewhere, elsewhere being any other
observer who can access the CEV only through the environment.
Introspection won’t work to tell us whether something is in the
environment or is an illusion or mirage.
If you control for X to be at a reference level R, and vary R
appreciably, and someone else observing your environment says that
they perceive something changing that they would also identify as X,
that’s evidence that X or something very like it is in the
environment. If the other disturbs what they see as X and you have
to vary your output to bring your perception of it to R, that’s more
evidence. If lots of people equally can perceive what they think of
as X and can also seem to influence it so that you have to vary your
output to bring it back near R, the weight of evidence increases.
But it’s never proof. All these other people might be subject to the
same illusion as you. But if you and they can control other
perceptions using X as though it was real, that’s better evidence.
Proof that something is not in the environment can often be
achieved. The example of the Ames Room has been brought up. The Ames
room looks from one specific viewpoint like a normal rectangular
room, in which people and objects change size as they move around
the room. Is the room really in the environment? Possibly. Is there
a real rectangular room in the place where you perceive one to
exist? Not according to people who view it from different places.
They see that the room exists, but is not rectangular. The
rectangularity is not in the environment, though the room may be. A
lake you perceive in the distance may not have any water if it is a
mirage. These properties are subject to test. You can’t control your
perception of your thirst level my drinking from an illusory lake.
…
As i write this though I'm beginning to doubt the examples of
thermostats or any other man made control system as clear
illustrations of control in living systems. This is because
machines input functions come about in a totally different way
to those of living things. They can be made to be much simpler;
a cruise control can sense velocity via a single variable
because of the way it is organised (a turning crank and some
frequency counter). There is no way a living system can sense
velocity with a single environmental variable (without some sort
of bio engineering).
I'm not clear why you say this. Velocity and direction sensing is
the job of “complex cells” in the primary visual cortex, which is
presumably before any possibility of being incorporated in a control
loop. At least the little neurophysiology that I read suggests that
their inputs are strictly bottom-up. I wouldn’t be at all surprised
if directional velocity rather than intensity were eventually found
to be at level 0 of the visual part of the control hierarchy. Bill
often used velocity below position in his models, so he wasn’t at
all dedicated to the hierarchy as we usually list it. He was usually
careful to point out that those eleven levels came from his own
introspection, and were individually unsupported by experiment. As
for intensity being at the base, relatively few (if any) sensor
cells give outputs that are functions of current intensity. Most
preferentially report changes both over time and with respect to
their neighbours, with some late resting level that might have a
relationship to intensity.
Visual velocity sensors function as I would imagine an engineered
velocity sensor would do if it had to rely on visual input alone.
Indeed, to me this seems to be true of a lot of systems. Evolution
has found a lot of solutions for problems addressed by engineers,
and there’s a lot of feedback between physiologists and engineers.
An engineer has a problem that biology seems to have solved; how
does the biological system do it? Maybe we could try that. Or, the
biological system seems to be doing something funny (such as the
frequency sweep of a hunting bat’s squeak); Why does it do that? Oh,
if we do that we can make our sonars more informative. The sensor
systems may be physically different, but there’s often a close
functional correspondence.
I wonder if this difference makes these examples hard for me
understand. I find the two domains don’t map onto each other
that well.
If cruise control p is really a single voltage in wire then
it would be only intensity controller?
Why? Every perceptual signal at every level in Powers's PCT is
carried on a single wire, isn’t it?
Sorry again for the length of this. All I really want to get across
is (1) that every perception and every corresponding environmental
variable (the new expansion of “CEV” agreed by Kent and me) has only
one degree of freedom, at least in the Powers version of PCT, which
means it is effectively “carried on a single wire”, and (2) that in
the absence of specific evidence in respect of a particular
perception and its CEV, all CEVs at every level have exactly the
same likelihood of being really in the environment. Either all of
them may be, or none of them can be. Philosophically I don’t think
there is a third possibility.
Martin